

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 656.2
Д. В. СУНГУРОВ, Р. В. ШАЛЫМОВ [1]
(Санкт-Петербургский государственный электротехнический университет «ЛЭТИ»)
Инерциальный метод диагностики рельсового пути с учетом состояния поверхностей катания колес вагона
Предложен алгоритм разделения сигнала микромеханического акселерометра на две составляющие, характеризующие геометрию поверхности катания колеса и рельса. Проведена его апробация на экспериментальных данных.
Введение
В настоящее время в мире доля высокоскоростного железнодорожного транспорта постоянно растет, что увеличивает динамические нагрузки на железнодорожные пути, приводя их к более быстрому износу и формированию аварийных ситуаций. В связи с этим возникает необходимость постоянного контроля качества рельсового пути.
Для этих целей в настоящее время используется ряд технических средств, таких как путеизмерительные вагоны и ручные средства измерения, но оперативный контроль качества железнодорожного пути ими затруднен.
Чтобы решить эту проблему возможно размещение как на тех же вагонах-дефектоскопах, так и на непрерывно курсирующих пассажирских и грузовых поездах Малогабаритной Инерциальной Системы Диагностики Рельсового Пути (МИСД РП) – разработки кафедры лазерных измерительных и навигационных систем СПбГЭТУ «ЛЭТИ» [1, 2].
С помощью МИСД РП возможно осуществлять диагностику рельсов, благодаря наличию в ее составе микромеханических акселерометров. Однако следует учитывать, что в процессе эксплуатации не только на поверхности катания рельса, но и на поверхности катания колеса могут появляться дефекты, что будет зафиксировано датчиками системы.
Влияние состояния поверхности катания колес тележки
на показания инерциальных датчиков
На рис.1 приведен пример влияния состояния колеса на диагностику рельсового пути. Легко видеть периодический характер сигналов акселерометров второй по ходу движения колесной пары (период, порядка 3 метров). Период соответствует одному обороту колеса. Показана высокая повторяемость характера данных ударов (рис. 2). Из этого можно сделать вывод о наличии дефекта поверхности катания колеса, на буксе которого был закреплен датчик микромеханический (ДММ1). Последнее обстоятельство затрудняет диагностику железнодорожного пути, т. к. неровности на поверхности колеса вызывают вариацию ускорения, аналогичную возникающей при прохождении колесом такого же дефекта на рельсе.
Для решения этой проблемы в настоящей статье предложен алгоритм диагностики рельсового пути с учетом состояния поверхности катания колеса.
 |
 |
Рис. 1. Сигналы акселерометров установленных на буксах колес.
Рис. 2. Сигнал ДММ1 с 6 последовательных оборотов колеса.
Дефекты поверхности катания колеса и рельс
Нужно понимать какие дефекты могут возникнуть в системе колесо-рельс, чтобы в последующем по показаниям датчиков можно было иметь представление о характере встреченной нами неровности.
Дефекты поверхности катания колеса и рельса можно разделить на следующие типы (рис.3):
1. Для рельса [3]:
a) выкрашивание металла на поверхности катания
b) пробуксовка или волнообразные деформации
c) смятие головки рельса
2. Для колеса [4]:
a) рифли на поверхности катания
b) некруглость колес
c) выкрашивание.
В зоне контакта колеса и рельса реализуются очень высокие давления (более 1000 МПа), приводящие при больших коэффициентах трения к пластическим деформациям поверхностей трения. Качение колеса по рельсу, особенно при движении в кривых, сопровождается значительным поперечным проскальзыванием. Кроме того, в паре колесо-рельс при торможении возможны случаи полного скольжения колеса по рельсу. Это приводит к термомеханическим повреждениям поверхности катания и достаточно быстрому выкрашиванию поверхностных поврежденных слоев под действием контактных напряжений.
 |
Результаты взаимодействия в системе колесо-рельс усиливаются при возникновении дефектов на поверхности катания колеса, ведь они являются причиной повышения динамических нагрузок, частоты приложения нагрузки качения, что также влечет за собой ускоренный износ рельса, его хрупкое и пластинчатое разрушение.
Рис. 3. Дефекты поверхности катания рельса и колеса.
Алгоритм инерциальной диагностики
В целях повышения точности определения дефектов поверхности катания рельс предлагается разделить сигнал микромеханического акселерометра (ММА) МИСД РП на две составляющие: реакцию ММА на собственные шумы (износ) рельсового пути и стыки рельс и реакции ММА на небольшие неровности и дефекты колеса. Структурная схема алгоритма приведена на рис. 4.
Для этого сигналы вертикальных микромеханических акселерометров (Wz1 – для впереди идущего колеса, Wz2 – для следом идущего колеса, м/с2) по данным одометра разбиваются на участки, соответствующие одному обороту колеса ходовой тележки вагона и осуществляется их нормировка в по глубине неровности. Глубина неровности в этом случае определяется:
 , (1)
, (1)
где hн – глубина неровности (м), amax – значение максимума ускорения в сигнале акселерометра (м/с2), λ – длина волны неровности (м).
В связи с тем, что сигнал ещё не разделен на его составляющие, т. е. он является суммой параметров неровностей как рельс, так и колес, нормирование ускорения производиться лишь по скорости движения средства, исключая тем самым её влияние на результат измерения.
Далее проводится корреляционный анализ нормированных сигналов акселерометров (a1н и a2н – для впереди и следом идущего колеса, соответственно, м-1), с целью выявления участков, формирование которых в большей степени обусловлено геометрией поверхности катания колеса, нежели рельса. В дальнейших расчетах используются участки, соответствующие двум оборотам колеса, на которых значение коэффициента автокорреляции превышает значение коэффициента взаимной корреляции, а также чей пик автокорреляционной функции лежит в пространственном диапазоне, допустимом погрешностью одометра (R11 и R22 – характеризуют корреляцию сигнала ММА1 и ММА2, соответственно, на двух оборотах колеса, R12 – коэффициент взаимной корреляции показаний акселерометров, совмещенных по путевой координате).
Последующая обработка данных производится только после накопления десяти отрезков a1,2jн (a1,2jн – нормированное ускорение для 1, 2 колес на j-м участке с превышением R11,22 над R12), характеризующих геометрию колеса.
Минимальное количество обрабатываемых отрезков определяется необходимостью получения профиля колеса с СКО ≤ 0,1 мм для обеспечения соответствующей точности измерения неровностей рельса (при минимальной рабочей скорости движения 1 м/с и СКО для акселерометра 0,5 м/с2).
В результате формируется массив, в котором каждой метке от одометра (от 0° до 360° через 2,5°, т. е. с шагом по дуге окружности колеса ~ 20мм, определяемому размером пятна контакта колесо-рельс) соответствует 20 значений результата измерений ММА1 и ММА2 (в разных оборотах колеса). В каждом из сечений массива происходит проверка на наличие выбросов по критерию 3σ и их отбраковка (в предположении о нормальном распределении результатов относительно истинного профиля колеса), а оставшиеся значения используются для вычисления среднего значения и среднеквадратического отклонения сигнала.
Выделив из сигнала датчика составляющую, характеризующую параметры износа колеса, рассчитываем профиль колеса в единицах длины. Для этого производим нормировку полученных результатов по длине неровности.
Маски колес (составляющие сигналов ММА, вызванные некруглостью колес, м/с2) рассчитываются из профилей в зависимости от скорости движения вагона и в дальнейшем исключаются из выходных данных инерциальных датчиков для последующего диагностирования параметров железнодорожного пути.
Рис. 4. Структурная схема алгоритма определения вертикальных неровностей.
Апробация алгоритма
С использованием вышеизложенного алгоритма были обработаны данные, полученные в результате проездов МИСД РП в составе диагностического комплекса «ИНТЕГРАЛ» на одноколейном участке рельсового пути Дмитровград – Обамза.
После начальной обработки были получены ненормированные профили (без учета длины волны неровности) для каждого колеса ходовой тележки вагона. На рис.5 приведены ненормированные профили для колес первой (колесо 1) и второй (колесо 3) тележек вагона.
Физический смысл в полученных профилях, в соответствии с [4], имеют низкочастотные составляющие, с пространственной частотой от одной до четырех волн неровностей на поверхности катания колеса. Приведенные на рис.6 (для первой и второй колесных пар) пространственные спектры показывают, что в сравнении с другими частотами низкочастотная составляющая сигнала не велика для 1 и 2 колес, но для колес 3 и 4 она может составлять до пары периодов на метр (спектры колес одной колесной пары аналогичны).
Далее происходит нормировка профилей в соответствии с длиной волны неровности и сглаживание сигнала в целях избавления от паразитных высокочастотных составляющих (рис. 7).
Рис. 5. Ненормированные профили двух следом идущих колес вагона.
Рис. 6. Пространственные спектры двух следом идущих колес вагона.
Полученные в результате сглаженные профили колес ходовой тележки вагона могут быть использованы как паспортное значение для каждого конкретного колеса. При этом от проезда к проезду их текущее состояние будет постоянно обновляться вместе с изменением поверхности катания колес. В результате рассчитываются маски колес для конкретного скоростного режима на каждом исследуемом участке. Эффективность последующего определения параметров поверхности катания рельсовых нитей демонстрируется на рис.8, из которого видно, что реализация описанного выше алгоритма привела к увеличению амплитуды пика взаимной корреляционной функции в месте присутствия дефекта примерно на 10%.
![]()
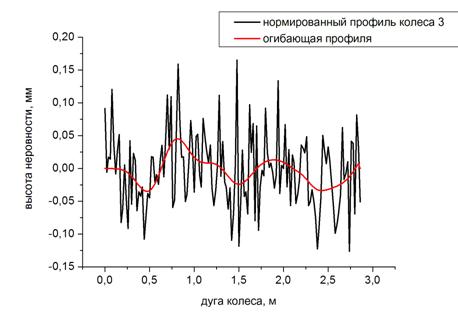
Рис. 7. Профиль колеса после нормировки и после сглаживания.
Рис. 8. Взаимная корреляционная функция в месте присутствия дефекта колеса.
Заключение
Таким образом, описанный алгоритм позволяет вычленить из общего сигнала датчиков реакцию на низкочастотные дефекты поверхности катания колес и в дальнейшем использовать полученные маски колес для коррекции сигнала акселерометра, что повысит точность диагностирования поверхности катания рельсового пути. В качестве возможной области использования результатов работы является улучшение алгоритмов работы МИСД РП или подобных ей систем с установленными ММА на колеса.
ЛИТЕРАТУРА
1. Боронахин, А. М. Малогабаритная интегрированная система диагностики рельсового пути // Гироскопия и навигация, №1 (64) // , , . – С-Петербург: ЦНИИ «Электроприбор», 2009. - С. 63 – 74.
2. Инерциальная система мониторинга рельсового пути // [и др.] // Изв. СПбГЭТУ «ЛЭТИ». 2011. Вып. 10. С 84 – 91.
3. Производственная компания МТК //Классификация дефектов и повреждений рельс. [Электронный ресурс]. – URL: www. mtrk. ru/defekt. php
4. ЖДМ 12-2007: Повышение надежности и срока службы колесных пар и рельсов. [Электронный ресурс]. – URL: www. /arhiv/2011/zdm-2011-no-3
[1] Научный руководитель к. т.н., доц. .
