
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 519.71
В. А.ЧЕКАНОВ
(, Электросталь)
В. Н.ЧЕСТНОВ [1]
(ИПУ РАН, Москва)
Радиус запасов устойчивости l1-оптимальных регуляторов по выходу
В данной работе исследуется радиус запасов устойчивости минимально-фазовых дискретных систем с l1- регуляторами по выходу. Исследование осуществляется не только на конкретных примерах, но и в общем случае, что помогает понять природу плохой робастности таких систем. Отмечается физическая неустойчивость систем с l1–оптимальным регулятором.
Введение
Во многих случаях какая-либо информация о характере возмущений отсутствует, известно лишь то, что они являются ограниченными. В таком случае требуется выбрать закон управления, который давал бы минимально возможное отклонение регулируемой переменной при произвольном ограниченном возмущении.
Задача об оптимальном подавлении произвольных ограниченных возмущений получила название l1-оптимизации.
l1-регуляторы заставляют работать систему на пределе своих возможностей и могут выводить замкнутую систему к границе устойчивости. Предлагаемый доклад посвящен рассмотрению радиуса запасов устойчивости минимально-фазовых систем с l1-регуляторамипо выходу и исследованию физической реализуемости закона управления (учитывается задержка в один такт, вносимая ЭВМ).
Исследование l1-оптимальных регуляторов по выходу
Рассмотрим дискретный объект управления
![]() (1)
(1)
где ![]() – измеряемая выходная переменная объекта;
– измеряемая выходная переменная объекта;
![]() – внешнее возмущение;
– внешнее возмущение;
![]() – управление;
– управление;
k – номер такта, дискретная величина.
![]() – оператор обратного временного сдвига
– оператор обратного временного сдвига
Уравнение регулятора имеет вид
![]() (2)
(2)
Тогда уравнение замкнутой системы будет иметь следующий вид
![]() (3)
(3)
Постановка задачи
Задача построить регулятор такой, что
а) характеристический полином замкнутой системы
![]() (4)
(4)
устойчив, все его корни относительно ![]() – вне единичного круга
– вне единичного круга
б) для всех внешних возмущений ![]()
Решение задачи
Если объект минимально-фазовый, то ![]() устойчив, т. е. имеет корни относительно
устойчив, т. е. имеет корни относительно ![]() вне единичного круга.
вне единичного круга.
Такой регулятор единственный и легко считается
![]() (5)
(5)
Найдем характеристический полином замкнутой системы
![]()
![]() (6)
(6)
Характеристический полином замкнутой системы устойчив.
Произошло сокращение в старших степенях оператора z-1обратного временного сдвига.
Запасы устойчивости
В непрерывном случае сокращение коэффициентов при старших степенях приводит к нулевым запасам устойчивости.
Рассмотрим запасы устойчивости в дискретных системах
Построим передаточную функцию разомкнутой системы
(7)
Радиус запасов устойчивости r:
![]()
![]() (8)
(8)
 (9)
(9)
|
Рис 1. Геометрическая интерпретация радиуса запасов устойчивости
Начало годографа 
(10)
Если сумма коэффициентов полинома a(z-1) велика, то годограф Найквиста весьма близко начинается от критической точки (-1;j0), радиус запасов устойчивости близок к нулю
Численный пример.
Построим l1-регулятор для непрерывного минимально-фазового объекта вида:
(11)
Преобразуем объект в дискретную форму с периодом дискретности Т=0.1с с помощью стандартной процедуры MATLAB c2d
(12)
В физически реализуемой форме
(13)
Тогда регулятор будет иметь вид
(14)
На рис. 2 показана структурная схема объекта с регулятором, выполненная в MATLAB
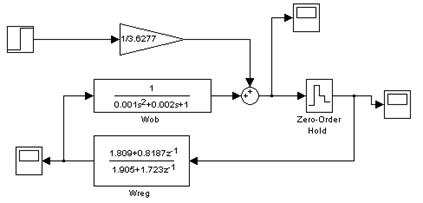
Рис. 2. Структурная схема объекта с регулятором в MATLAB
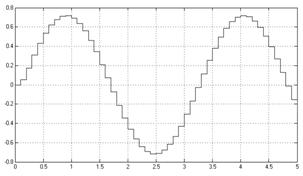
На рис. 3 и рис. 4 показаны переходные процессы по регулируемой переменной, на рис. 5 показан переходный процесс по управлению при подаче на вход ступеньки с амплитудой 1.
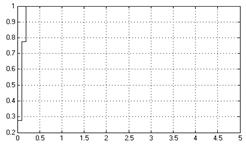
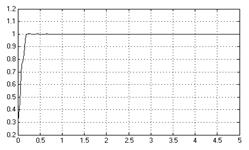
|
|

Рис.5 Переходный процесс по управлению
На рис. 6 и рис. 7 показаны переходные процессы по регулируемой переменной, на рис. 8 показан переходный процесс по управлению при подаче на вход sin(2wt).
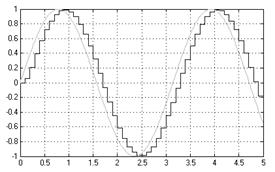
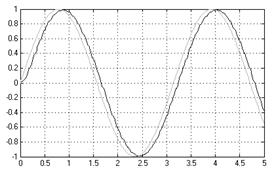
|
|
|
Установившееся значение регулируемой переменной
![]() (15)
(15)
На рисунках переходных процессов по регулируемой переменной видно, что регулируемая переменная отстает от возмущения на 2 такта. Это произошло из-за того, что брался непрерывный объект.
Построение годографа разомкнутой системы в MATLAB
На рис. 9 показана структурная схема разомкнутой системы в MATLAB.
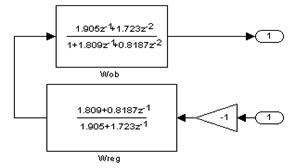
Рис 9. Структурная схема разомкнутой системы в MATLAB
На рис. 10 показан годограф разомкнутой системы по выходу объекта.

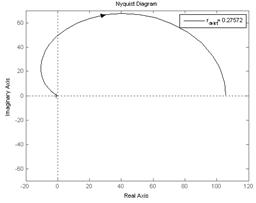
Рис 10. Годограф разомкнутой системы по выходу объекта
Физическая реализуемость
Полученный регулятор физически нереализуем, так как управление в k-тый момент времени зависит от значения регулируемой переменной в k-тый момент времени. Для физической реализации введем задержку в один такт, вносимый ЭВМ при реализации l1 закона управления
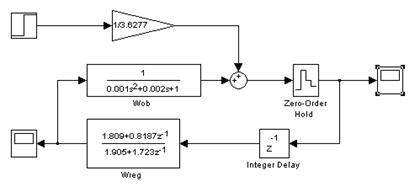
Рис. 11. Структурная схема объекта с регулятором при наличии задержки в MATLAB
На рис. 12 показан результат моделирования объекта с получившимся регулятором. При введении задержки система потеряла устойчивость.
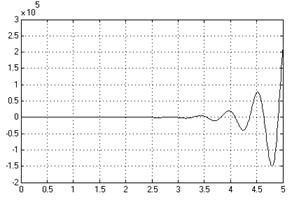
Рис. 12. Переходный процесс по регулируемой переменной y
Заключение
В работе был построен l1-регулятор по выходу для колебательного звена.
Показано, что значение у(k) повторяет возмущение w(k) с некоторым запаздыванием
Построен годограф разомкнутой системы и показано, что запасы устойчивости системы невелики.
Показана физическая нереализуемость данной системы (при введении задержки система потеряла устойчивость).
Литература
1. Якубович задач оптимального управления для линейных дискретных систем // АиТ 1975. №9. С. 73-79
2. , Граничин регулятор для линейных объектов с ограниченным шумом // АиТ, 1984. №5. С. 39-46.
3. Барабанов минимаксных регуляторов СПб.: Изд-во С.-Петерб. ун-та, 1996
4. DahlehM.,Pearson J. B. l1 optimal feedback controllers for MIMO discrete system // IEEE Trans. Autom. Control 1987.V.32, No. 4. P.314-322
5. Видьясагар М Optimal rejection of persistent bounded disturbances// IEEE Trans. Autom. Control 1986. V. 31. P.527-535.
Текст доклада согласован с научным руководителем.
 Научный руководитель:
Научный руководитель: