

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.7-5: 621.314.522
.
Исследования вариантов Дифференциального управления моментом применительно к асинхронному двигателю с короткозамкнутым ротором
Электропривод промышленных установок на базе асинхронного электродвигателя в настоящее время является наиболее распространенны. Причиной этого послужили простота обслуживания, низкая стоимость, высокая перегрузочная способность и надежность. Однако управление асинхронным двигателем затруднено из-за нелинейности процессов, которые в нем происходят.
Во многом требования глубоко регулирования противоречивы. С одной стороны, требуется высокая динамическая точность регулирования и быстродействие. С другой стороны, предъявляются жесткие требования к массогабаритным показателям исполнительной электрической машины. Однако существует обширный класс механизмов, не предъявляющий столь жестких требований. В таких системах вполне могут найти широкое применение электроприводы на базе асинхронных двигателей [1].
Как известно, из существующих систем регулирования, обладающих наивысшим быстродействием является прямое управление моментом (ПУМ), базовые алгоритмы имеют разрывный характер [2], что приводит к значительным пульсациям электромагнитного момента. В связи с чем, многие исследовали, предложили использовать алгоритмы, построенные на базе ПУМ, формирующие управляющие воздействия посредствам широтно-импульсной модуляции (ШИМ) [3]. Вместе со снижением пульсаций электромагнитного момента значительно снижается быстродействие системы. В связи с чем, многие исследовали стали использовать сочетания разрывного управления в переходных процессах и ШИМ-управление в статических режимах[4].
Рассмотрим метод обобщенного управления, основанный на особенностях изменения физического состояния электродвигателя при изменении его координат [5]. В [5] показано, что величина производных регулируемых переменных определяется относительным пространственным положением векторов ЭДС статора и ротора, ![]() и
и ![]() , по отношению к векторам потокосцеплений
, по отношению к векторам потокосцеплений ![]() и
и ![]() соответственно. Полученные согласно данному подходу зависимости для формирования векторов напряжения для полностью управляемой электрической машины имеет вид:
соответственно. Полученные согласно данному подходу зависимости для формирования векторов напряжения для полностью управляемой электрической машины имеет вид:

где h1 h2 h3,h4 – весовые коэффициенты; M – электромагнитный момент на валу двигателя; ![]() – требуемое значение производной модуля потокосцепления статора,
– требуемое значение производной модуля потокосцепления статора, ![]() – требуемое значение производной электромагнитного момента,
– требуемое значение производной электромагнитного момента,  – вектор потокосцепления статора;
– вектор потокосцепления статора;![]() – вектор потокосцепления ротора;
– вектор потокосцепления ротора; – вектор напряжения статора;
– вектор напряжения статора; ![]() – вектор напряжения статора;
– вектор напряжения статора;![]() – активные сопротивления обмоток статора и ротора соответственно; ω – угловая скорость вращения ротора двигателя;
– активные сопротивления обмоток статора и ротора соответственно; ω – угловая скорость вращения ротора двигателя;  – матрица поворота вектора.
– матрица поворота вектора.
В [6] был реализован описанный алгоритм, в результате чего было получено, что управляющее воздействие формировало в первую очередь состояние статора. Для получения положительной производной электромагнитного момента необходимо чтобы проекция вектора Е1 на ось, направленную вдоль Ψ2, была положительной. Выполнение этого условия было бы достаточно, если бы имелась возможность независимо сформировать положительную проекцию вектора Е2 на вектор Ψ1. Но так как у асинхронного двигателя с короткозамкнутым ротором такой возможности нет, поэтому данное условие является необходимым, но не достаточным.
При синтезе систему управления за основу возьмем обобщенный алгоритм управления для полностью управляемой машины (1), в дальнейшим его будем называть дифференциальное управление.
Перепишем уравнение (1) регулируя только электромагнитный момент в произвольно вращающейся системе координат u-v:
 (2)
(2)
Из третьего и четвертого уравнения(2) выразим ![]() и подставим его в первое и второе и заменяем
и подставим его в первое и второе и заменяем  на
на ![]() .
.
 (3)
(3)
Рассмотрим полученное выражение (3) с физической точки зрения. Формирование векторов напряжений в соответствии с полученными зависимостями будут гарантировать движение системы к заданному значению электромагнитного момента, но проекция вектора напряжения на вектор Ψ1 будет больше падения напряжения на активном сопротивлении статора, что будет способствовать увеличению тока, а значит и магнитного потока создаваемого им. Данная гипотеза подтверждается векторной диаграммой, представленной на рис.1.
Рис. 1. Векторная диаграмма работы асинхронного двигателя
Для исследования разработанного алгоритма управления АД, используем компьютерную модель системы электропривода с параметрами двигателя: R1=7.5 Ом, R2=5 Ом, индуктивность обмотки статора L1=0.285 Гн, индуктивность обмотки ротора L2=0.283 Гн, взаимная индуктивность обмотки статора и ротора Lm=0.275 Гн, количество пар полюсов P=2, момент инерции ротора J=0.1 кг∙м2.
Результаты моделирования при ступенчатом изменении заданного электромагнитного момента показаны на рис.2.
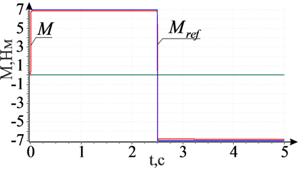
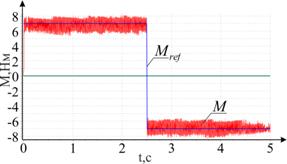
а) б)
Рис. 2. Переходные процессы электромагнитного момента а) вектор напряжения не ограничен по амплитуде и формируется, как непрерывная величина б) вектор напряжения сформирован при помощи ШИМ
В ходе анализа управления алгоритма управления предложенного в [6], примирительно к АД было выявлено, что при работе на больших угловых скоростях, когда ЭДС вращения близка к предельному напряжению, происходит отклонение вектора напряжения от требуемого направления, что препятствует достижению целей регулирования. Для решения этой проблемы воспользуемся одним из способов оптимального управления, рассмотренного в [7]. Результатом использования этого способа являются связывающие функции весовых коэффициентов h1, h3.
 (4)
(4)
где a, b, n, m – коэффициенты, зависящие от параметров и переменных двигателя
Так как полученная функция (4) содержит переменные, которые определяются во время работы асинхронного двигателя и носит нелинейный характер, поэтому найдем частное решение для разработанной компьютерной модели. При синтезе управляющего воздействия необходимо сделать допущение, что переходные процессы в канале момента и потока протекают независимо друг от друга.
В результате получим:
![]() (5)
(5)
С учетом (4), (5) и запишем полученное управляющие воздействие:
 (6)
(6)
где  - электрическая угловая скорость ротора.
- электрическая угловая скорость ротора.
Результаты моделирования зависимости (6) при ступенчатом изменении заданного электромагнитного момента показаны на рис.3.
а) б)
Рис.3. Переходные процессы электромагнитного момента: а) вектор напряжения не ограничен по амплитуде и формируется, как непрерывная величина; б) вектор напряжения сформирован при помощи ШИМ
Анализ полученных зависимостей показывает, что полученный алгоритм позволяет достичь целей регулирования, однако для его реализации необходимы наблюдатели скорости и магнитного состояния. С физической точки зрения, полученные результаты можно объяснить следующим образом, при формировании вектора напряжения по зависимости (6) вектор ![]() смещается в положение, соответствующие номинальному режиму работы АД.
смещается в положение, соответствующие номинальному режиму работы АД.
1. Панкратов векторное управление асинхронными электроприводами [текст] /, / Учеб. пособие. – Новосибирск: Изд-во НГТУ, 2005. – 119 с.
2. M. Depenbrock – Direct self-control (DSC) of Inverter – fed induction machine // IEEE transactions on energy conversion, 1988. – vol.3,no 4.
3. Idris, N. R.N. Direct torque control of induction machines with constant switching frequency and improved stator flux estimation / Idris, N. R.N, Yatim, A. H.M. ; Azli, N. A. // Industrial Electronics Society, 2001. IECON '01. The 27th Annual Conference of the IEEE 2001 – vol.2, p 1285 – 1291.
4. Lascu C., Boldea I., and Blaabjerg F. A modified direct torque control for induction motor sensorless drive //IEEE Trans. Ind. Applicat. – Vol. 36 – P.122-130. – 2000.
5. Завьялов принципы управления процессом электромеханического преобразования энергии // Электричество. 2013. – №2. – С. 34-42.
6. Завьялов управление моментом асинхронного двигателя с короткозамкнутым ротором / , , // Автоматизированный электропривод и промышленная электроника в образовании, науке и производстве: труды V Всероссийской научно-практической конференции / СибГИУ. – Новокузнецк 2012.
7. Ещин процессы электромеханических систем горных машин в режиме пуска и стопорения [текст]: Диссертация на соискание учен. степени д-ра техн. наук. – Кемерово, 1996.
