

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Универсальная нагрузочная втулка 9 служит для создания статического и/или динамического нагружения вала и представляет собой стальную обойму, в которой размещены два шариковых подшипника качения, опирающихся своими внутренними кольцами на поверхность испытуемого вала.
 а)
а) 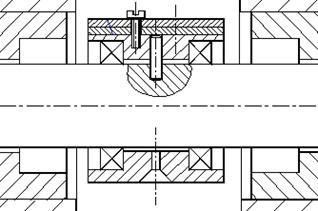 б)
б)
Рисунок 3.2 – Ротор (а) и схема статического нагружения (б)
Статическое нагружение осуществляется через нагрузочную втулку 9 с подшипниками качения, стержень 10, который центрирует втулку, и нагрузочные диски 11. Роль привода выполняет асинхронный электродвигатель АИР80A2EY3 ( кВт,
кВт, ![]() об/мин) 12 с частотным преобразователем 13, что позволяет варьировать частоту вращения без применения промежуточных передач (
об/мин) 12 с частотным преобразователем 13, что позволяет варьировать частоту вращения без применения промежуточных передач ( об/мин). Динамическое нагружение осуществляется постоянной по модулю симметричной относительно опор центробежной силой от дисбаланса, создаваемого втулкой 9. Вектор центробежной нагрузки вращается с частотой вращения вала в плоскости, перпендикулярной его оси. При этом втулка (рисунок 3.2б) жестко фиксируется на валу посредством специального штифта. Для регулирования величины создаваемого дисбаланса на наружной поверхности втулки крепятся грузы (винты) различной массы. Величина дисбаланса определялась расчетным путем с точностью до ±1×10–5 кг×м и могла варьироваться (в зависимости от массы и числа винтов) в пределах (10…50)×10–5 кг×м, достаточных для достижения целей исследования
об/мин). Динамическое нагружение осуществляется постоянной по модулю симметричной относительно опор центробежной силой от дисбаланса, создаваемого втулкой 9. Вектор центробежной нагрузки вращается с частотой вращения вала в плоскости, перпендикулярной его оси. При этом втулка (рисунок 3.2б) жестко фиксируется на валу посредством специального штифта. Для регулирования величины создаваемого дисбаланса на наружной поверхности втулки крепятся грузы (винты) различной массы. Величина дисбаланса определялась расчетным путем с точностью до ±1×10–5 кг×м и могла варьироваться (в зависимости от массы и числа винтов) в пределах (10…50)×10–5 кг×м, достаточных для достижения целей исследования
В случае статического нагружения (рисунок 3.2б) штифт вынимается и вал, при фиксированном положении втулки 11, может одновременно свободно вращаться и в подшипниках скольжения, и в подшипниках качения. Для передачи статической нагрузки, действующей на испытуемый вал, на корпус 1 сверху устанавливается кондуктор. Размещенный в нем шток, нагруженный определенной массой 11, опирается на сферическую поверхность стального шарика, установленного в углублении на поверхности втулки 9 и, далее, через подшипники качения, нагружает ротор симметричной относительно опор, постоянной по величине и направлению силой. Такое конструктивное исполнение нагружающего устройства не накладывает заметных ограничений на горизонтальные и вертикальные перемещения ротора. Масса груза 11 варьируется массой и количеством составляющих ее нагрузочных пластин и может изменяться в пределах 0.1…20 кг с точностью до 0.010 кг.
Передача крутящего момента с электродвигателя на вал 8 осуществляется через электромагнитную муфту 14. Система подачи смазки выполнена по замкнутой схеме и включает в себя следующие элементы: бак емкостью 50 литров; электрический насос БВО12–40 мощностью 0,25 кВт, обеспечивающий возможность изменения параметров потока подаваемого в подшипник смазочного материала (давление подачи p0 = 0,2…0,5 МПа; давление слива ра=0,1 МПа; расход Qт до 0,5 кг/с; температура Т0 = 293…323 К); фильтры грубой и тонкой очистки для предотвращения попадания мелкодисперсных включений в гидравлические тракты установки; нагреватели, служащие для изменения температуры рабочей жидкости; необходимые вентили; соединительные трубопроводы высокого и низкого давлений. При продолжительной работе происходит неконтролируемое повышение температуры рабочей жидкости. Для поддержания постоянства температуры воды в баке происходит ее периодическое обновление.
В целях обеспечения безопасности проведения экспериментальных работ и предотвращения выхода оборудования из строя все быстровращающиеся элементы (муфта, ременная передача, электродвигатель и т. д.) защищены металлическими кожухами, а электропроводка и электродвигатель изолируются от попадания влаги специальными водонепроницаемыми чехлами. Для выполнения повышенных требований к соосности подшипников корпуса подшипниковых узлов 5 при сборке специально центрировались друг относительно друга. Проверка соосности заключалась в сравнении диаметральных зазоров в подшипниках, полученных в результате предварительных обмеров, с радиальными перемещениями вала в установке. Отличие этих величин друг от друга не превышает 5 мкм, что свидетельствует о малости перекосов между опорами.
Данная экспериментальная установка позволяет испытывать следующие типы подшипников: гидростатодинамические с прямоугольными и точечными камерами, гладкие гидродинамические, многоклиновые гидродинамические, гибридные, совмещающие гладкую и многоклиновую опорные поверхности.
Гидростатодинамические подшипники (рисунок 3.3), изготовлены из бронзы БрО10Ф1 и имеют следующие параметры: номинальный диаметр D = 40 мм; длина опорной поверхности L = 66 мм; число питающих прямоугольных камер NК = 4; длина камеры LK = 46 мм; ширина камеры BK = 8 мм. В качестве компенсаторных устройств используются дроссели длиной lH = 3 мм и диаметром dH = 0,8 мм. Овальность, конусообразность и бочкообразность опорной поверхности, измеренные посредством прибора для измерений отклонений формы и расположения поверхностей вращения «Абрис-К10.2», не превышают 6 мкм, а шероховатость на уровне Rа = 0,63 мкм.
Подача смазочного материала в область радиального зазора осуществляется посредством жиклеров, закрепленных в четырех радиальных отверстиях, соединяющих прямоугольные питающие камеры с коллектором, выполненным в виде кольцевой проточки на наружной поверхности втулок (рисунок 3.3). В коллектор смазочный материал поступает под давлением через входной штуцер, установленный в корпусе. Отработанная жидкость сливается во внутреннюю полость установки, откуда она уходит через сливной штуцер, а также через сливные отверстия, размещенные в полости подшипниковых узлов.
Сборка испытуемого роторно-опорного узла осуществляется по посадке H7/e8, которая обеспечивает гарантированный радиальный зазор не менее 50 мкм. Измеренный средний радиальный зазор составляет h0 = 75 мкм.
Рисунок 3.3 –Подшипник с прямоугольными питающими камерами
4 Проведение комплекса экспериментов по изучению работоспособности мехатронных подшипников и отработки алгоритмов управления и контроля
Для обработки экспериментальных данных служит модуль программного обеспечения, интерфейс которого представлен на рисунке 4.1. Методика обработки экспериментальных данных предполагает анализ амплитудно-частотных характеристик с помощью процедуры быстрого преобразования Фурье, расположения, размера и вида траекторий движения вала в плоскости датчиков перемещения. Настройки модуля обработки экспериментальных данных позволяют использовать различные математические функции для фильтрации вибрационных сигналов, количества точек, отображаемых на экране и временного отрезка эксперимента.
Оценка грузоподъемности подшипника на установившемся режиме проводилась на основе показаний датчиков перемещений по следующей методике. На установившемся режиме центр цапфы вала описывает замкнутую эллиптическую кривую вокруг некоторого центра, соответствующего кривой подвижного равновесия. Координаты этого центра определяют эксцентриситет положения ротора относительно центра подшипника (рисунок 4.2). Для установившегося режима работы грузоподъемность подшипника приравнивается внешней статической нагрузке, действующей на ротор, включая силу тяжести.
1) траектории движения вала в плоскости установки датчиков перемещений;
2) развертки колебаний вала по осям X и Y; 3) координаты центра орбиты и амплитуды колебаний; 4) показания датчиков давлений; 5) время эксперимента и количество точек, отображаемых на экране; 6) быстрое преобразование Фурье (по оси абсцисс отложена частота вращения, об/мин)
Рисунок 4.1 − Окно модуля обработки экспериментальных данных
Рисунок 4.2 – Характерная траектория центра цапфы ротора
Для определения координат точек траекторий центра цапфы вала необходимо осуществить привязку измеряемых датчиками перемещений к геометрическому центру подшипника. В положении покоя вал находится в нижней точке окружности втулки подшипника; соответственно, датчики перемещений показывают положение X1, Y1 в системе координат, связанной с активной поверхностью датчиков. Переход к системе координат, связанной с центром подшипника, осуществляется по следующим зависимостям:
 (2)
(2)
где XП, YП – поправка показаний датчиков по соответствующим осям, равная расстоянию от плоскости чувствительного элемента датчика до опорной поверхности втулки подшипника.
Поправки XП и YП вычисляются путем серии промежуточных измерений после монтажа подшипникового узла (рисунок 4.3а):
1) фиксируются показания датчиков при крайнем нижнем положении вала:
 ; (3)
; (3)
2) фиксируются показания датчиков при крайнем верхнем положении вала:
 ; (4)
; (4)
3) проводятся аналогичные измерения по оси X для двух крайних горизонтальных положений вала в подшипнике.
Перемещение вала 3 (рисунок 4.3б) из одного положения в другое производится с помощью разработанного и изготовленного приспособления. Это приспособление представляет собой призму 2, перемещающуюся только с помощью двух микрометрических винтов 5. Дополнительно для контроля показаний датчиков перемещения 1 используется индикатор 6 часового типа 1МИГ (ГОСТ 9696–82) с ценой деления 2 мкм, жестко закрепленный в платформе 4.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
