

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Государственное бюджетное общеобразовательное учреждение
Лицей «Вторая Школа»
Разработка зонда с системой управляемого спуска
Исполнитель: Заичкин Иван
Руководитель:
Москва - 2017
СОДЕРЖАНИЕ
Введение................................................................................................ 3
Конструкция аппарата.......................................................................... 4
Система управляемого спуска.............................................................. 7
Алгоритм посадки................................................................................. 9
Состояние работ.................................................................................... 10
ВВЕДЕНИЕ
Проблема
Отсутствие дешёвых и практичных средств доставки малогабаритного научного оборудования в труднодоступные места
Актуальность
До сих пор в современном мире нет дешёвого и практичного аппарата, способного решать задачи доставки и размещения научного оборудования в удалённые и труднодоступные точки. В настоящее время решение этих задач возможно только с помощью коптеров. Эти аппараты, во-первых, дороги, а во-вторых, быстро разряжаются в условиях Севера. Они, например, не подходят в качестве доставщиков фотоловушек, потому что в силу своей дороговизны не являются одноразовыми аппаратами. Поэтому создание дешёвых, практичных, надёжных аппаратов для выполнения очерченного круга функций является актуальной задачей.
Практическая значимость
Практическая значимость исследования состоит в возможности решения следующих задач, актуальных для науки, экономики и обеспечения безопасности:
1. Доставка малогаборитной аппаратуры в труднопроходимые или вредные для человека места
2. Установка автоматических станций наблюдения (например, фотоловушек, используемых для отслеживания перемещения животных)
3. Создание связи между удалёнными населёнными пунктами
Объект исследования
Искусственный атмосферный аппарат, отвечающий параметрам регулярной Лиги RosCanSat
Предмет исследования
Система управляемого спуска
Цель исследования
Разработка и создание дешёвого аппарата с системой управляемого спуска
Задачи
1. Разработка конструкции зонда на основе учебного зонда CanSat
2. Исследование особенностей управления спуском атмосферного аппарата
3. Разработка алгоритма управляемого спуска аппарата
4. Создание зонда CanSat с системой управляемого спуска
КОНСТРУКЦИЯ АППАРАТА
Из-за большого объёма электроники стандартного конструктора CanSat возникла необходимость увеличения пространства внутри зонда. Для этого стандартное металлическое ребро было заменено на три металлические стойки, размещённые в вершинах правильного треугольника, вписанного в окружность с диаметром, равным 63 мм. Благодаря такому размещению было достигнуто равномерное распределение нагрузки между стойками.
С целью создания модульной системы внутреннее пространство зонда было разбито на две секции : отсек электроники и сервоотсек (отсек живучести).
Отсек электроники – самый объёмный из отсеков. Он занимает нижнюю часть зонда. В нём установлена объединяющая плата, к которой при помощи разъёмов присоединяются три платы стандартного конструктора CanSat. На самой плате находятся стабилизаторы питания, а также системы контроля заряда аккумуляторов. Эта объединяющая плата разделяет отсек электроники на два подотсека : батарейный и приборный.
В приборном подотсеке располагаются плата датчиков и плата с радиомодулем.
В батарейном подотсеке - батарея, плата с микроконтроллером и пирометр.
Сервоотсек (отсек живучести) – самый крепкий и защищённый отсек. В нём находятся две сервомашинки для управления парашютом-крылом, аварийные батареи, жёсткотельный носитель данных (micro SD карточка), GPS/ГЛОНАСС/QZSS, GSM - модуль.
GSM-модуль необходим для обеспечения связи в случае отказа работы радиомодуля.
Жёсткотельный носитель данных – для сохранения данных с аппарата.
GPS/ГЛОНАСС/QZSS модуль – для определения координат зонда.
Благодаря собственным батареям, эта аппаратура сможет проработать в течение нескольких часов, что позволит найти аппарат в случае повреждения основных его систем.(рисунки 1 - 4)
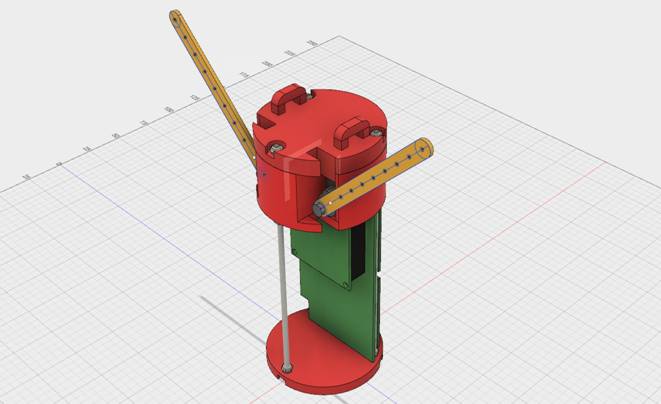
Рисунок 1 – Компьютерная модель зонда. Вид сверху (на сервоотсек)
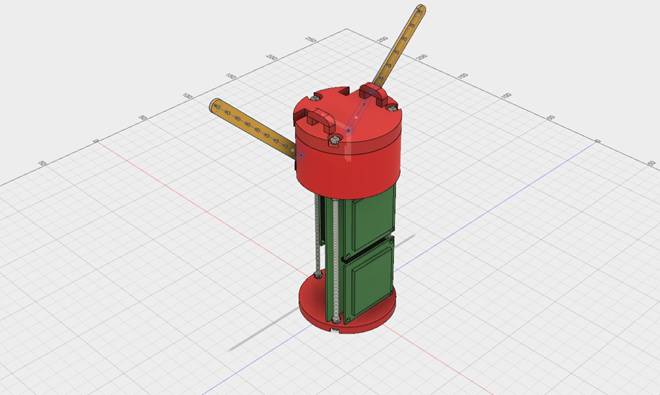
Рисунок 2– Компьютерная модель зонда Вид сверху (на сервоотсек)

Рисунок 3– Компьютерная модель зонда. Вид снизу
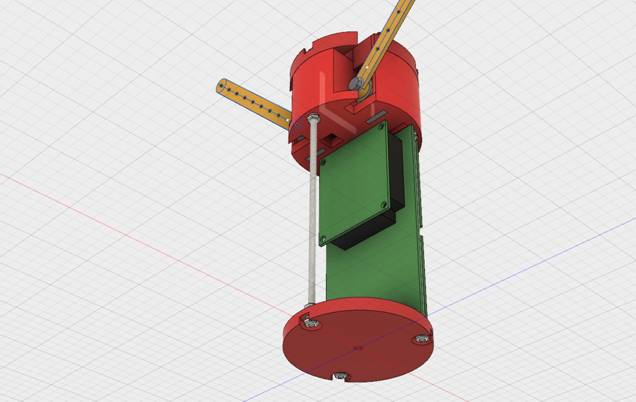
Рисунок 4– Компьютерная модель зонда. Вид снизу
СИСТЕМА УПРАВЛЯЕМОГО СПУСКА
Для системы спуска будет использоваться парашют типа крыло. Возможность управления таким парашютом доказана радиоуправляемой моделью парашютиста, известный во всём мире как skydiver (рисунок 5)

Рисунок 5 – Радиоуправляемая модель парашютиста (http://longlist. org/rc+skydiver)
Этот маленький парашютист примерно равен по массе нашему зонду, а, значит, парашют, используемый для него, по площади должен подходить и для нашего зонда. На основе информации об этой модели был создан и испытан наш парашют (рисунок 6)
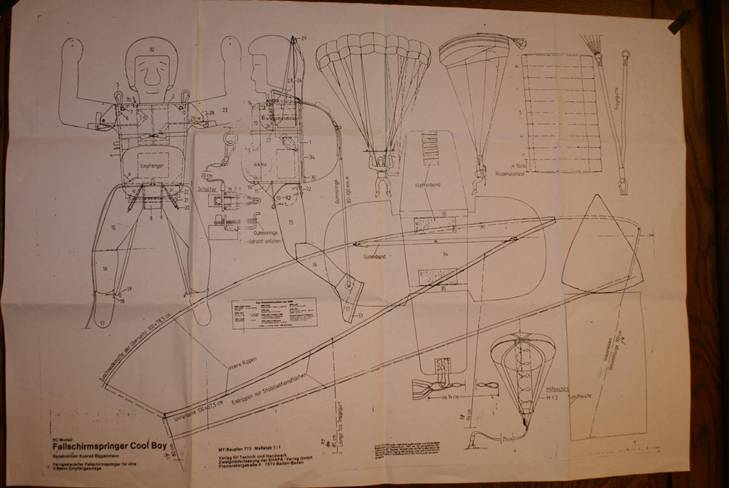
Рисунок 6 – Чертёж/выкройка skydiver
Видео испытаний https:///video-143960405_456239021
АЛГОРИТМ ПОСАДКИ
Для посадки зонда был придуман следующий алгоритм:
1. После сброса аппарат определяет свой курс и угол между точкой посадки и его курсом
2. В случае, если угол становится больше 90 градусов, аппарат производит манёвр поворота в сторону выбранной точки посадки, пока угол не станет приблизительно равен 0 градусов.
3. Потом аппарат продолжает остлеживать угол и корректирует свой курс (пункт 2 алгоритма)
Таким образом, разброс от указанных координат будет составлять не более 5 метров от цели, что обусловлено погрешностью GPS либо двум радиусам, необходимым для поворота аппарата на 180 градусов
СОСТОЯНИЕ РАБОТ
Разработан и напечатан корпус аппарата
Проведены испытания парашюта
Готовятся испытательные полёты для отработки алгоритма посадки
