
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 531
К вопросу о движущей силе при езде на инерционном самокате.
Рассмотрены кинематические и динамические характеристики механической системы водитель-инерционный самокат и оптимальный способ передвижения без отталкивания ногой от земли при езде на инерционном самокате. Показано, что движущая сила при движении по ровной поверхности без отталкивания ногой возникает только при наличии кориолисова ускорения.
Ключевые слова: инерционный самокат, движущая сила, кориолисово ускорение, условие движения на самокате без отталкивания от земли.
В последние годы в мире, в том числе и в России, получила популярность езда на трёхколёсных инерционных самокатах. Среди ведущих производителей инерционных самокатов такие фирмы как Trikke, Fliker, Zip, Trider Triski, Razor Powerwing и другие. Американский патент на данное изделие в 2000 году получил изобретатель бразильского происхождения Жильдо Белески (GildoBeleski) (1)(2). В 2002 году журнал Тайм включил в число наиболее значимых изобретений (3). Известно, что изобретатель ещё с 1988 года проводил экспериментыс трёхколёсным самокатом. В описании к патенту автор не приводит каких либо формул и расчётов движущей силы, получаемой для движения на самокате без отталкивания ногой от дорожного покрытия. При этом в американском патенте он так описывает способ перемещения на инерционном самокате: «Движение вперед обеспечивается за счёт переменного смещения веса водителя из стороны в сторону при обеспечении для транспортного средства синусоидальной траектории и поддержания движении при угловой скорости средства, отличной от нуля».
Современные публикации по поводу движения на инерционных самокатах также расчётов движущей силы не приводят. Вот один из примеров объяснения его движения: «Инерционный самокат – это самокат с тремя колесами, но при этом для каждой ноги предусмотрена отдельная подвижная платформа. Эта инновационная модель приводится в движение с помощью перемещения веса с одной ноги на другую, а также определенными вращательными движениями нижней части тела. Такой самокат не требует постоянного отталкивания от земли, поскольку постепенно разгоняясь, он может развить приличную скорость» (4).
Чтобы понять, откуда появляется движение у самоката без отталкивания ногой от земли покажем, что в отличии от Мюнхаузена, поднявшего себя за волосы вместе с лошадью из болота, Жильдо Белески опирается на законы механики.
Рассмотрим механическую систему водитель-самокат-дорога, по отношению к двум системам отсчёта. Первая подвижная, неинерциальная система отсчёта OXYZ жёстко связана с самокатом. Вторая инерциальная, «неподвижная» O'X'Y'Z'. В терминологии, принятой в теоретической механике, движение водителя по отношению к самокату (системе отсчёта OXYZ) является относительным движением, движение самоката по отношению к дороге (системы OXYZ по отношению к системе O'X'Y'Z') является переносным движением, а движение водителя по отношению к дороге (системе отсчёта O'X'Y'Z') является абсолютным движением (5). Согласно теореме о сложении ускорений (теореме Кориолиса) абсолютное ускорение ![]() аб =
аб = ![]() от +
от + ![]() пер+
пер+ ![]() кор (1) , где
кор (1) , где
![]() от – относительное ускорение, характеризующее изменение относительной скорости только при относительном движении;
от – относительное ускорение, характеризующее изменение относительной скорости только при относительном движении;
![]() пер – переносное ускорение, характеризующее изменение переносной скорости только при переносном движении;
пер – переносное ускорение, характеризующее изменение переносной скорости только при переносном движении;
![]() кор – кориолисово ускорение, характеризующее изменение относительной скорости центра масс при переносном движении и переносной скорости центра масс при его относительном движении, которое равно удвоенному векторному произведению переносной угловой скорости (угловой скорости самоката)
кор – кориолисово ускорение, характеризующее изменение относительной скорости центра масс при переносном движении и переносной скорости центра масс при его относительном движении, которое равно удвоенному векторному произведению переносной угловой скорости (угловой скорости самоката) ![]() пер на относительную скорость центра масс
пер на относительную скорость центра масс ![]() от:
от:
![]() кор= 2(
кор= 2(![]() пер
пер![]()
![]() от) (2)
от) (2)
Направлен вектор![]() кор перпендикулярно плоскости проходящей через векторы
кор перпендикулярно плоскости проходящей через векторы ![]() пер и
пер и ![]() от в ту сторону, откуда кратчайшее совмещение
от в ту сторону, откуда кратчайшее совмещение ![]() пер с
пер с ![]() от видно происходящим против хода часовой стрелки. Также для определения направления кориолисова ускорения часто используется правило Жуковского: для определения направления ускорения Кориолиса необходимо относительную скорость
от видно происходящим против хода часовой стрелки. Также для определения направления кориолисова ускорения часто используется правило Жуковского: для определения направления ускорения Кориолиса необходимо относительную скорость ![]() от точки спроецировать на плоскость, перпендикулярную оси переносного вращения, и повернуть эту проекцию в той же плоскости на угол 90˚ в сторону переносного вращения.
от точки спроецировать на плоскость, перпендикулярную оси переносного вращения, и повернуть эту проекцию в той же плоскости на угол 90˚ в сторону переносного вращения.
Для выработки оптимальных приёмов езды на инерционном самокате отметим:
1. При движении по твёрдой горизонтальной дороге на самокате без отталкивания от земли обеспечить ![]() пер не равное нулю не представляется возможным. С другой стороны, водитель должен оставаться на самокате и, соответственно, относительное ускорение
пер не равное нулю не представляется возможным. С другой стороны, водитель должен оставаться на самокате и, соответственно, относительное ускорение ![]() от в направлении траектории движения тоже должно равняться нулю. Отсюда, ускорение, которое может получить механическая система водитель-самокат для постоянного движения может быть только кориолисовым ускорением
от в направлении траектории движения тоже должно равняться нулю. Отсюда, ускорение, которое может получить механическая система водитель-самокат для постоянного движения может быть только кориолисовым ускорением ![]() кор.
кор.
2. Анализируя формулу 2 выясняем, что ![]() кор при поступательном, прямолинейном движении равно нулю. Также кориолисово ускорение нулевое при
кор при поступательном, прямолинейном движении равно нулю. Также кориолисово ускорение нулевое при ![]() от = 0. Таким образом, для получения ускорения самоката с водителем для продолжения непрерывного движения, необходимо поддерживать траекторию движения самоката в форме синусоиды, чередуя правый и левый вираж, а водителю при этом необходимо синхронно совершать относительно осей колёс самоката поперечные перемещения.
от = 0. Таким образом, для получения ускорения самоката с водителем для продолжения непрерывного движения, необходимо поддерживать траекторию движения самоката в форме синусоиды, чередуя правый и левый вираж, а водителю при этом необходимо синхронно совершать относительно осей колёс самоката поперечные перемещения.
3. Для обеспечения направления движения вперёд при левом вираже ![]() пер (вектор угловой скорости направлен вверх) водителю необходимо перемещаться (перемещать центр масс системы) слева-направо. При правом вираже (вектор
пер (вектор угловой скорости направлен вверх) водителю необходимо перемещаться (перемещать центр масс системы) слева-направо. При правом вираже (вектор ![]() пер направлен вниз) водителю по отношению к колёсам самоката надо перемещаться справа-налево (рис.1). Смену направления виража надо проводить синхронно с реверсом поперечных перемещений со скоростью
пер направлен вниз) водителю по отношению к колёсам самоката надо перемещаться справа-налево (рис.1). Смену направления виража надо проводить синхронно с реверсом поперечных перемещений со скоростью
![]() от.
от.
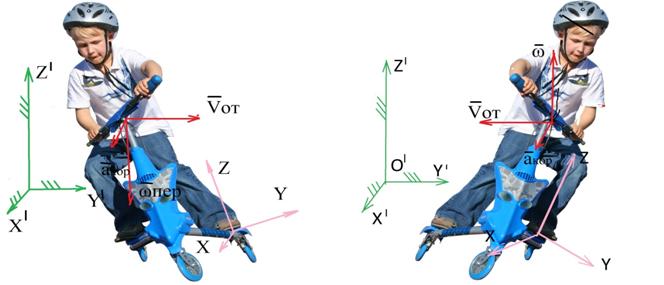
Рис.1 Векторы ![]() пер,
пер, ![]() от и
от и![]() кор при левом и правом вираже траектории инерционного самоката соответственно.
кор при левом и правом вираже траектории инерционного самоката соответственно.
4. Движущая сила ![]() , которую получает водитель, стоящий на самокате, перемещающийся по ровной горизонтальной поверхности, согласно второму закону Ньютона, равно произведению массы водителя m на ускорение
, которую получает водитель, стоящий на самокате, перемещающийся по ровной горизонтальной поверхности, согласно второму закону Ньютона, равно произведению массы водителя m на ускорение ![]() кор, причём линия действия ускорения совпадает с линией действия кориолисова ускорения.
кор, причём линия действия ускорения совпадает с линией действия кориолисова ускорения.
![]() = 2m (
= 2m (![]() пер
пер![]()
![]() от) (3)
от) (3)
5. На уклоне, при движении вниз движущая сила ![]() возрастает на величину проекции силы тяжести на общую касательную прямую для профиля колеса и профиля дороги в плоскости колеса, а на подъёме, напротив, на такую же величину сила
возрастает на величину проекции силы тяжести на общую касательную прямую для профиля колеса и профиля дороги в плоскости колеса, а на подъёме, напротив, на такую же величину сила ![]() снижается.
снижается.
Примечания:
1. https://www. /patents/US6220612
2. http://www. /watch? v=Q-S2M4VHVEM
3. http://content. /time/specials/packages/article/0,28804,1934259_1934277_1934504,00.html
4. http://velosipedinfo. ru/skolko-stoit-samokat-kak-vyibrat-samokat-kakie-vozmozhnyi-variantyi-vyibora
5. Тарг курс теоретической механики.-Высшая школа.- Москва,-1986 год, 416 стр.
Об авторе: — доцент кафедры «Механики и автотранспортного сервиса» ФГБОУ ВПО ПсковГУ, канд. техн. наук. E-mail: *****@***ru
M A Lukin
On the issue of the driving force while riding a Trikke scooter.
Kinematic and dynamic characteristics of the mechanical system Trikke scooter driver and the best way to travel without repulsion foot off the ground while riding a Trikke scooter. It is shown that the driving force during driving on a flat surface without legs repulsion occurs only if the Coriolis acceleration is not zero and is directed in the direction of motion.
Keywords: Trikke scooter, driving force, Coriolis acceleration, traffic conditions on the scooter without pushing away from the ground.
