


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
Тульский государственный университет
Институт высокоточных систем им.
Факультет «Системы автоматического управления»
Кафедра «Приборы управления»
Контрольно-курсовая работа по дисциплине:
«Моделирование динамических систем»
Вариант №10
Выполнил: студент группы 121521
Проверил: доцент каф. ПУ
Тула 2014 г.
Содержание
Введение…………………………………………………………………….….3
Задание на ККР…………………………………………………………………4
1 Задание 1……………………………………………………………………...5
1.1 Метод последовательного интегрирования…..……………..…………5
1.2 Метод канонической формы …………………...……………………....8
1.3 Метод вспомогательной переменной……… ……………………….10
1.4 Модель в пространстве состояний в нормальной форме.…………...11
1.5 Модель в пространстве состояний в канонической форме………….14
1.6Модель в пространстве состояний в форме простых сомножителей………………………………………………..……..………17
2 Задание 2…………………………………………………………………….20
Список использованной литературы………………………………………...22
Введение
Контрольно-курсовая работа (ККР) имеет целью закрепление полученных знаний в области применения компьютерных технологий, углубление навыков, полученных на практических и лекционных занятиях по курсу «Моделирование систем».
Целью работы является проведение численного моделирования системы, описанной системой дифференциальных уравнений (передаточной функцией). Для этого нужно решить следующие задачи:
– построить систему дифференциальных уравнений первого порядка;
– получить передаточную функцию;
– составить схемы моделирования методом последовательного (непосредственного) интегрирования, методом вспомогательной переменной и методом канонической формы;
– построить системы уравнений, соответствующие методам последовательного (непосредственного) интегрирования, вспомогательной переменной и канонической формы;
– провести моделирование составленных схем;
– получить матрицы пространства состояний в нормальной форме, канонической форме и форме простых сомножителей;
– определить значения коэффициентов для всех схем моделирования;
– смоделировать переходные процессы в системе для всех схем моделирования и сделать вывод о результатах моделирования.
– для нелинейной системы необходимо построить схему моделирования и привести результаты моделирования для заданных входных воздействий.
Задание на ККР
Задание 1
№ Варианта | Передаточная функция |
|
|
|
10 |
| 0 | 9 | 11 |
Задание 2
№ Варианта | Нелинейность
|
|
|
|
|
|
|
10 |
| 2 | ±0,1 | 1 | 1,0 | 0,07 | 0,2 |
1 Задание 1
Передаточная функция:  ,
,
где:
![]()
![]()
![]() .
.
Тогда передаточная функция примет окончательный вид:
![]()
Получим дифференциальное уравнение системы 3-его порядка:
![]()
1.1 Метод последовательного интегрирования
Выходной сигнал системы можно представить в виде суммы сигналов нескольких систем, на которые воздействует один и тот же входной сигнал ![]() :
:


![]()
Первое уравнение системы будет иметь вид:
![]()
Ему соответствует передаточная функция:
![]()
Суть метода последовательного интегрирования состоит в том, что дифференциальное уравнение разрешают относительно старшей производной:
![]()
а младшие производные и сам выходной сигнал получают последовательным интегрированием сигнала старшей производной. При этом выходная переменная ![]() и ее производные заменяется машинными переменными:
и ее производные заменяется машинными переменными:
![]() ,
, ![]() ,
,  ,
,  .
.
Тогда уравнение принимает вид:
![]()
Для составления схем для второго уравнения системы обратимся к передаточной функции:
![]()
Из этого следует:
![]()
отсюда по теореме Лапласа об изображении производной получаем:
![]()
Тогда выходной сигнал ![]() представляется в виде суммы сигналов:
представляется в виде суммы сигналов:
![]()

Рисунок 1 – Схема моделирования методом последовательного интегрирования
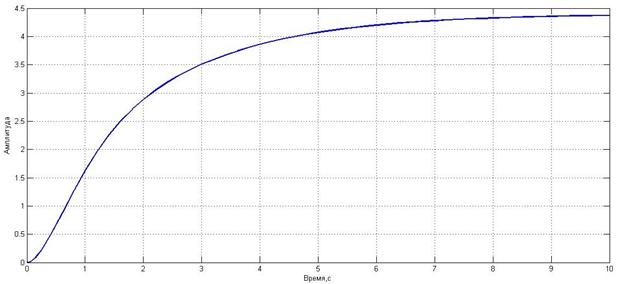
Рисунок 2 – Результат моделирования методом последовательного интегрирования
Система дифференциальных уравнений, соответствующая схеме моделирования на рисунке 1, имеет вид:
1.2 Метод канонической формы
Суть метода состоит в том, что исходное уравнение разрешают относительно искомой переменной ![]() . Для этого его записывают в операторной форме:
. Для этого его записывают в операторной форме:
![]()
и делят на ![]() (
(![]() – порядок уравнения):
– порядок уравнения):
![]()
Далее уравнение разрешают относительно ![]() и группируют по степеням p:
и группируют по степеням p:
![]()
Отсюда получают выражение для выходного сигнала y:
![]()
Схема моделирования методом канонической формы имеет вид, представленный на рисунке 3.

Рисунок 3 – Схема моделирования методом канонической формы
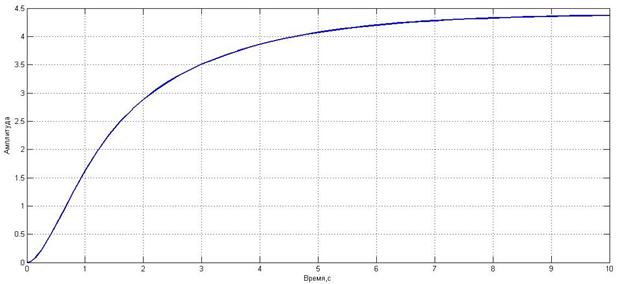
Рисунок 4 – Результат моделирования методом канонической формы
Система дифференциальных уравнений, соответствующая схеме моделирования на рисунке 3, имеет вид:
1.3 Метод вспомогательной переменной
Вводим вспомогательную переменную:
![]()
Этой передаточной функции соответствует уравнение:
![]()
отсюда
![]()
Из передаточной функции следует, что в операторной форме:
![]()
отсюда, на основании обратного преобразования Лапласа:
![]()
Введем переменные:
![]()
Уравнения для z и y(t) с учетом переменных ![]() , образуют систему уравнений, решающую дифференциальное уравнение:
, образуют систему уравнений, решающую дифференциальное уравнение:
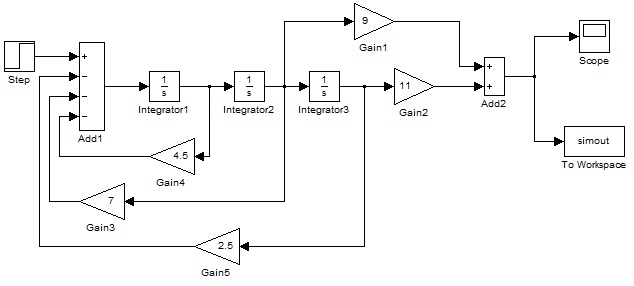
Рисунок 5 – Схема моделирования для метода вспомогательной переменной
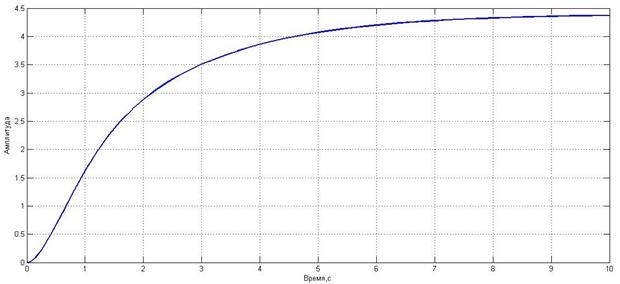
Рисунок 6 – Результат моделирования методом вспомогательной переменной
1.4 Модель в пространстве состояний в нормальной форме
Моделью в пространстве состояний называется описание вида:
Элементы матриц A, B, C, D равны коэффициентам при соответствующих переменных системы уравнений.
Для составления системы уравнений воспользуемся методом вспомогательной переменной.
Вводим вспомогательную переменную:
![]()
Этой передаточной функции соответствует уравнение:
![]()
отсюда
![]()
Из передаточной функции следует, что в операторной форме:
![]()
отсюда, на основании обратного преобразования Лапласа:
![]()
Производим переход к машинным переменным:
Вектор состояний состоит из 3-х элементов:  .
.
Дифференциальное уравнение приобретает вид:
![]()
Получаем следующую систему уравнений:
![]()
Отсюда находим матрицы пространства состояний:


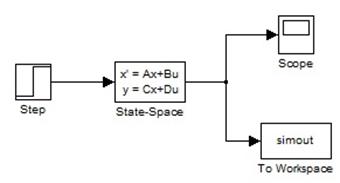
Рисунок 7 – Схема моделирования в пространстве состояний в нормальной форме
Рисунок 8 – Результат моделирования в пространстве состояний в нормальной форме
1.5 Модель в пространстве состояний в канонической форме
Перейдем к канонической форме передаточной функции.

Найдём ![]() A, B и C
A, B и C
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()

Рассмотрим первую подсистему:
Составим систему уравнений
![]()
![]()
![]()

![]()
Рассмотрим вторую подсистему
Составим систему уравнений
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
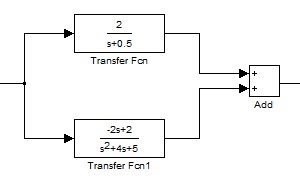
Рисунок 9 – Объединение подсистем
При объединении систем:

![]()
После объединения подсистем, система уравнений будет иметь вид:
![]()

![]()
![]()
Отсюда находим матрицы пространства состояний:

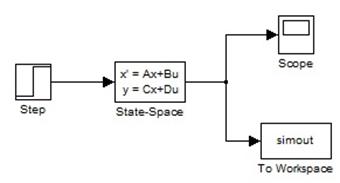
Рисунок 10 – Схема моделирования в пространстве состояний в канонической форме
Рисунок 11 – Результат моделирования в пространстве состояний в канонической форме
1.6 Модель в пространстве состояний в форме простых сомножителей
![]()
Перейдем к форме простых сомножителей.
![]()
Рассмотрим первую подсистему
Составим систему уравнений
![]()
![]()
Рассмотрим вторую подсистему

Составим систему уравнений
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
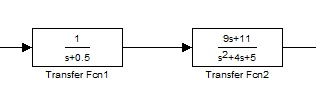
Рисунок 12 – Объединение подсистем
При объединении систем:
![]()


После объединения подсистем, система уравнений будет иметь вид:
![]()
![]()

![]()
![]()
Отсюда находим матрицы пространства состояний:

![]()
![]()
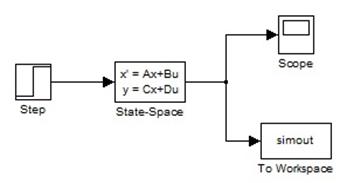
Рисунок 13 – схема моделирования в пространстве состояний в форме простых сомножителей
Рисунок 14 – Результат моделирования в пространстве состояний в форме простых сомножителей
2 Задание 2
Дано:
где ![]() .
.
Параметры системы уравнений:
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
Нелинейность ![]() :
:
Подставляя значения получим:
![]()
Рисунок 15 – Схема моделирования
Рисунок 14 – Результат моделирования задания 2
Список использованной литературы
1. Бахвалов систем: учеб. пособие для вузов / . – М.: Изд-во МГГУ, 2006. – 295с.
2. оделирование процессов и систем в MATLAB: учебный курс / Ю. Лазарев. – СПб.: Питер, 2005. – 512 с.
3. Мартынов в MATLAB 6.x: Учебник / . – М.: КУДИЦ-ОБРАЗ, 2002. – 352 с.
4. Новгородцев, электрических цепей в MATLAB: Учеб. курс / . – М. [и др.]: Питер, 2004. – 250 с.
5. Поршнев моделирование физических процессов в пакете MATLAB: Учеб. пособие для вузов / . – М.: Горячая линия-Телеком, 2003. – 592с.
6. MATLAB 7: основы работы и программирования: учеб. пособие для вузов / . – М.: Бином, 2006. – 320 с.
7. Советов систем: Практикум: Учеб. пособие для вузов / , . – 2-е изд., перераб. и доп. – М.: Высш. шк., 2003. – 295 с.
8. Советов систем: учебник для вузов / , . – 4-е изд., стер. – М.: Высш. шк., 2005. – 342 с.
9. Тарасик моделирование технических систем: учебник для вузов / . – 2-е изд., испр. и доп. – Минск: Дизайн ПРО, 2004. – 640с.
