
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.86
ИССЛЕДОВАНИЕ ДВИЖЕНИЯ БАЗОВОГО ШАССИ КРАНА-МАНИПУЛЯТОРА
С ПОМОЩЬЮ МНОГОМАССОВЫХ ДИНАМИЧЕСКИХ МОДЕЛЕЙ
Разработаны многомассовые динамические модели крана-манипулятора при движении с грузом. С их помощью проанализированы динамические воздействия на основные элементы конструкции и оператора машины, оснащенной краном-манипулятором.
Ключевые слова: кран-манипулятор, движение с грузом, динамика, многомассовая модель.
Для детального исследования динамической нагруженности при движении с грузом требуется представление элементов крана-манипулятора как стержней с распределенными параметрами. Для решения такой задачи в работах [1; 2] использован метод конечных элементов. В то же время для решения различных прикладных задач, например при исследовании вибронагруженности оператора, это не требуется, потому что основное воздействие на человека оказывает геометрическая неровность опорной поверхности [1].
Рис. 1. Многомассовая модель движения машины с краном-манипулятором | В связи с этим можно перейти от конечноэлементной к многомассовой модели (рис. 1), содержащей инерционные элементы, соединенные упруго-диссипативными связями. Это позволит снизить трудоемкость расчетов, что особенно важно при предварительных расчетах различных компоновочных вариантов базового шасси крана-манипулятора. Базовое шасси крана-манипулятора совершает вертикальные и вращательные колебания в продольной и поперечной плоскостях. Для сокращения числа уравнений движения опорные катки с каждой стороны машины приведены к двум массам |
Геометрические неровности опорной поверхности ![]() ,
, ![]() ,
, ![]() и
и ![]() моделируются случайным образом по алгоритму [1].
моделируются случайным образом по алгоритму [1].
В модели кран-манипулятор представляется сосредоточенной массой ![]() и упруго-диссипативной связью с параметрами
и упруго-диссипативной связью с параметрами ![]() ,
, ![]() . Модель предполагает, что стрела крана-манипулятора находится в положении для проезда стесненных участков [1], так как она не учитывает возможность бокового перекоса шасси.
. Модель предполагает, что стрела крана-манипулятора находится в положении для проезда стесненных участков [1], так как она не учитывает возможность бокового перекоса шасси.
Другая группа элементов отвечает за колебания кабины и оператора машины. Она включает в себя следующие элементы: m50 – масса кабины, m51 – масса тела человека вместе с приведенной массой кресла, m52 – масса головы человека. Жесткость с60 и вязкость![]() соответствуют демпфирующим опорам кабины, с51 и
соответствуют демпфирующим опорам кабины, с51 и ![]() – креплению кресла,
– креплению кресла,
с52 и ![]() – телу человека.
– телу человека.
Запишем общий вид уравнений движения динамической системы:
Внутренние динамические усилия в конструкции записываются следующим образом:

![]()

![]()




![]()
где ![]() – вертикальные линейные перемещения элементов системы;
– вертикальные линейные перемещения элементов системы; ![]() – угловые перемещения (повороты) базы машины (
– угловые перемещения (повороты) базы машины (![]() );
); ![]() ,
, ![]() ,
, ![]() – массы, жесткости и коэффициенты диссипации элементов системы;
– массы, жесткости и коэффициенты диссипации элементов системы; ![]() – моменты инерции базы машины;
– моменты инерции базы машины; ![]() – ширина колеи (базы) машины;
– ширина колеи (базы) машины; ![]() – расстояния между элементами конструкции.
– расстояния между элементами конструкции.
Масса крана-манипулятора вычисляется следующим образом:
![]() ,
,
где ![]() – масса поднимаемого груза;
– масса поднимаемого груза; ![]() – приведенная к точке подвески груза масса металлоконструкции крана-манипулятора (вычисляется по известным зависимостям [2]).
– приведенная к точке подвески груза масса металлоконструкции крана-манипулятора (вычисляется по известным зависимостям [2]).
Для машины АСТ-4-А следует использовать следующие значения параметров динамической модели: ![]() кг,
кг, ![]() кг,
кг, ![]() кг,
кг, ![]() кг,
кг, ![]() кг,
кг, ![]() кг,
кг, ![]() кг,
кг, ![]() Н/м,
Н/м, ![]() кН/м,
кН/м, ![]() кН/м,
кН/м, ![]() кН/м,
кН/м, ![]() кН/м,
кН/м, ![]() кН/м,
кН/м, ![]() кНс/м,
кНс/м, ![]() кНс/м,
кНс/м, ![]() кНс/м,
кНс/м, ![]() кНс/м,
кНс/м, ![]() кНс/м,
кНс/м, ![]() кНс/м,
кНс/м, ![]() кНс/м,
кНс/м, ![]() м,
м, ![]() м,
м, ![]() м,
м, ![]() м.
м.
Жесткость крана-манипулятора ![]() определяется исходя из экспериментальных
определяется исходя из экспериментальных
данных, аналитического расчета или по результатам численного моделирования.
Для определения жесткости крана-манипулятора использована полная конечноэлементная модель [3], включающая в себя все элементы несущей металлоконструкции крана-манипулятора: поворотную колонну, стрелу, рукоять, два гидроцилиндра и шарниры.
Результаты расчета показаны на рис. 2.

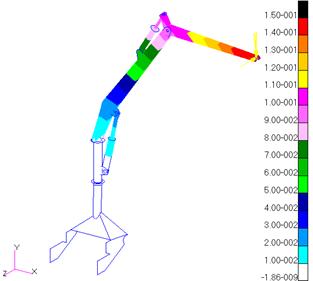
а) б)
Рис. 2. Результаты конечноэлементного расчета:
а – напряжения, МПа; б – перемещения, м
При подъеме груза весом P=7357,5 Н перемещение точки подвеса груза вдоль вертикальной оси ![]() 0,0904 м. Следовательно, жесткость крана-манипулятора
0,0904 м. Следовательно, жесткость крана-манипулятора
![]() кН/м.
кН/м.
Для решения системы дифференциальных уравнений движения разработана компьютерная программа. Интегрирование уравнений при нулевых начальных условиях выполнено методом Рунге-Кутта четвертого порядка.
Полученные реализации динамической нагруженности для различных элементов модели при движении машины по асфальтобетонной дороге с подвешенным на кране-манипуляторе грузом показаны на рис. 3.
|
Время, с |
|
Время, с |
|
Время, с |
|
Время, с |
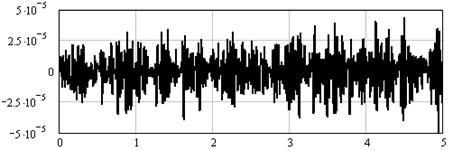
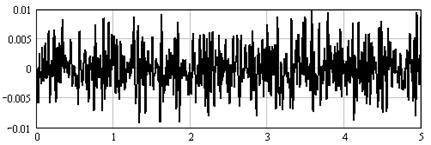
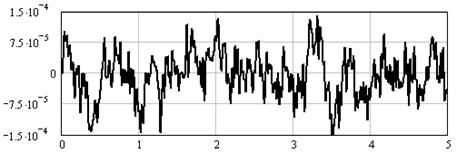
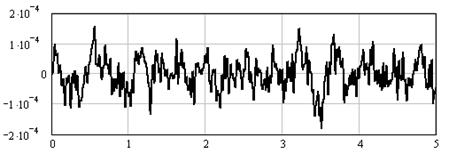
Рис. 3. Динамическая нагруженность при движении с грузом
по асфальтобетонной дороге
На основании выполненных расчетов можно сделать следующие выводы о воздействии геометрической неровности опорной поверхности на динамическую нагруженность базового шасси крана-манипулятора и вибронагруженность оператора машины:
1. Наибольшие амплитуды, скорости и ускорения колебаний наблюдаются в элементах подвески базового шасси крана-манипулятора, что связано с наличием в динамической системе неподрессоренных масс (опорных катков). База машины (![]() ) колеблется с меньшими амплитудами, так как основное назначение элементов подвески – снижение воздействия геометрической неровности пути на основные несущие элементы машины и транспортируемые объекты. Амплитуда колебаний кресла оператора выше, чем амплитуда колебаний базы. Эти качественные выводы хорошо согласуются с данными экспериментальных исследований [4].
) колеблется с меньшими амплитудами, так как основное назначение элементов подвески – снижение воздействия геометрической неровности пути на основные несущие элементы машины и транспортируемые объекты. Амплитуда колебаний кресла оператора выше, чем амплитуда колебаний базы. Эти качественные выводы хорошо согласуются с данными экспериментальных исследований [4].
2. При движении машины АСТ-4-А с транспортной скоростью (2 км/ч) амплитуда колебаний базы машины в 50-100 раз, а амплитуда колебаний тела и головы оператора машины в 20-50 раз ниже амплитуды колебаний опорных катков. Таким образом, подвеска машины АСТ-4-А защищает оператора, кран-манипулятор и транспортируемый груз. Это главным образом связано с низкой скоростью движения и большой массой базы.
3. С увеличением неровности дорожного полотна растут амплитуды колебаний всех элементов системы, в том числе тела и головы оператора.
4. Колебания груза на подвесе оказывают незначительное влияние на нагруженность оператора машины, которая определяется воздействием микрорельефа опорной поверхности.
Дальнейшие исследования будут посвящены оценке влияния волнистости опорной поверхности с длиной волны, сопоставимой с длиной машины, оснащенной краном-манипулятором.
СПИСОК ЛИТЕРАТУРЫ
1. Лагерев, нагруженность крана-манипулятора машины для сварки трубопроводов при движении с грузом / // Подъемно-транспортное дело. – 2011. – №3. – С. 7-9.
2. Лагерев, динамической нагруженности и оптимизация трехзвенных гидравлических кранов-манипуляторов транспортно-технологических машин для сварки трубопроводов: автореф. дис. … канд. техн. наук / . – Брянск, 2011. – 18 с.
3. Лагерев, напряженно-деформированного состояния крана-манипулятора машины для сварки трубопроводов / // Изв. высш. учеб. заведений. Машиностроение. – 2011. – №4. – С. 29-36.
4. Корчагин, динамических воздействий на оператора автогрейдера в транспортном режиме / , , . – Омск: СибАДИ, 2009. – 195 с.
Материал поступил в редколлегию 9.01.13.
