
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Двухзвенный манипулятор
Автор: Немов Андрей
ФМЛ №30
Санкт-Петербург, 2015 год.
Оглавление
Цель: 2
Задачи: 2
Устройство манипулятора: 2
Материалы: 3
Моторы: 3
Выбор балок: 3
1: Составление примерных расчётов. 5
3: Разработка 3D модели и финальные расчёт. 6
Цель:
Создание робота-манипулятора, на основе платы Arduino Uno, способного переносить некий груз из точки в точки A в точку B, указанную пользователем.
Задачи:
1)Составление примерных расчётов длин и плеч балок, а также расчётов моментов сил у моторов необходимых для поднятие данного участка конструкции.
2) Расчёт геометрии манипулятора: расчет операционного окна.
3)Разработка 3D модели манипулятора в программе Creo Parametrics, а также финальные расчёты плеч балок и их масс и вычисления максимальной массы, поднимаемого груза, исходя из 3D модели.
4)Сборка манипулятора из полученных деталей.
5)Написание программы для управление манипулятором.
6)Финальные испытание.
Устройство манипулятора:
Манипулятор состоит из двух звеньев, одно звено A длинной примерно 250 мм, а второе звено B длинной примерно 200 мм. Звено A и B закреплены между собой серво мотором. В свою очередь звено установлено на круглой платформе и закреплено двумя серво моторами, также на краю платформы установлен двигатель переменного тока с колесом. На противоположном конце звена B, от закрепление со звеном A, установлен захват, так же с помощью серво мотора. Круглая платформа установлена на площадке(Рисунок 0.1).
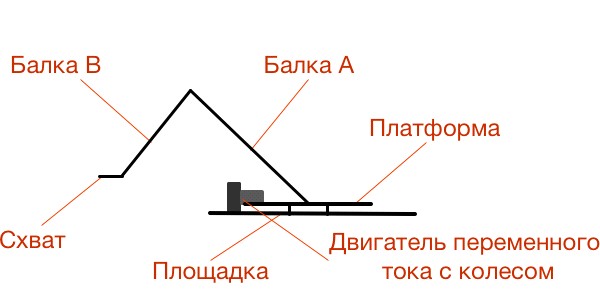
Рисунок 0.1
Материалы:
Балки, площадка, схват и платформа сделаны из пластика толщиной 3 мм и плотностью 1.2 г/см3. Также в конструкции используются различные винты и саморезы.
Моторы:
Для соединения платформы с балкой A используются два серво мотора MG996R(Крутящий момент: 9.4 кг*см (при напряжение в 6 В), масса: 55 г). Для соединения балки A и B также используется серво мотор MG996R. Для соединения схвата и балки B используется серво мотор MG90S(Крутящий момент: 1.8 кг*см (при напряжение в 6 В), масса: 13.4 г). Серво моторы, используемые в схвате, - два FS90 (Крутящий момент: 1.3 кг*см (при напряжение в 6 В), масса: 9 г).
Выбор балок:
В данной конструкции в качестве балки A и B использовался двутавр, так как по отношению к другим балкам она относительна легкая, но в тоже время достаточна прочная, также по сравнение с другими балками двутавр легче собирать(Таблица 0.2).
Форма сечения | Площадь поперечного сечения (также показатель массы ), мм2 | Момент сопротивления плоского сечения, мм3 | ||
Вокруг X | Вокруг Y | Полярный | ||
Кольцо
| 349 | 3226 | 3226 | 5967 |
Полый квадрат
| 444 | 6400 | 6400 | 9051 |
Тавр
| 231 | 3224(1240) | 804 | 1794 |
Двутавр
| 342 | 4607 | 1604 | 4392 |
Корыто
| 342 | 3906(2217) | 4607 | 4587 |
Крест
| 231 | 804 | 804 | 1604 |

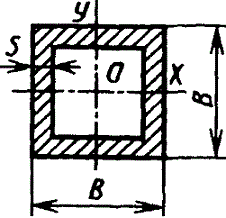
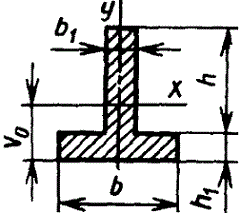
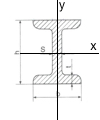
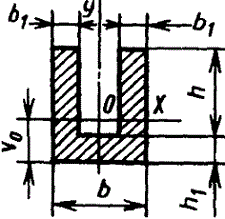
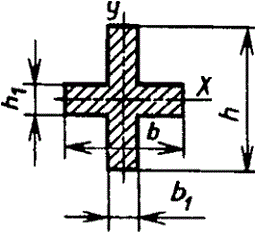
Таблица 0.2
Сразу же от бросились варианта кольца, так как такую конструкцию не вырезать на предоставленном лазерном станке, полый квадрат, так как он тяжёлый, тавр, из-за того что его сложно закрепит, и крест, так как он не прочный, в итоге рассматривались двутавр и корыто. Исходя из данной выше схемы можно заметить, что масса корыта такая же, как и у двутавра, но момент сопротивление плоского сечения вокруг оси Y у корыта и оси X у двутавра одинаковые, а вокруг оси X у корыта больше чем вокруг оси Y у двутавра. Но в соответствие с крепежом в платформе основное напряжение будет вокруг оси X (Рисунок 0.3, 0,4).
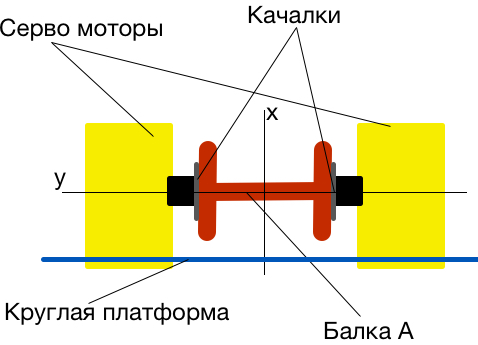
Рисунок 0.3
Рисунок 0.4
Решающем фактором в выборе между корытом и двутавром стало простота сборки, так как для сборки двутавра потребуется три части, а для корыта понадобилось бы больше частей.(Рисунок 0.5)
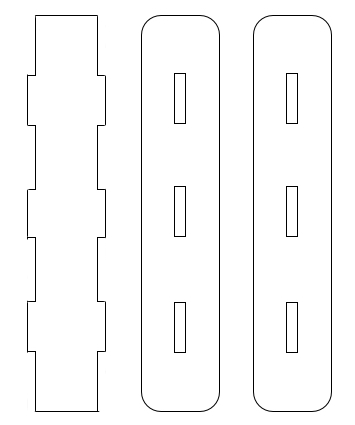
Рисунок 0.4
Для облегчения конструкции были проделаны отверстия в некоторых частях конструкции. Для укрепления конструкции были использованы стягивающие болты(Рисунок 0.6).
1: Составление примерных расчётов.
Масса, г | Плечо1, мм | Плечо 2, мм | Плечо 3, мм | k | Момент, кг*см | ||||
a, mm | 250 | Груз | 30,00 | 550 | 300 | 100 | 1,5 | Серво 3 | 1,155 |
b, mm | 200 | Серво 45 | 24,00 | 500 | 250 | 50 | Серво 2 | 6,3312 | |
с, mm | 100 | Cхват | 70,00 | 500 | 250 | 50 | Серво 1 | 18,83295 | |
Серво 3 | 15,00 | 450 | 100 | ||||||
Балка b | 82,08 | 350 | 100 | ||||||
Серво 2 | 55,00 | 250 | |||||||
Балка a | 102,60 | 125 | |||||||
Серво 1 | 55,00 |
За эталон балок были взяты балки длинной 200 мм (балка B) и 250 мм (балка A) и шириной 40 мм. В соответствие с этими данными, а также массой серво моторов была составлена следующая таблица(Таблица 1.0)
Таблица 1.0
В этой таблице рассмотрен наихудший случай, когда балка A с балкой B образует угол 180o, балка B с платформой образует угол 90o, а балка B со схватом образует угол 180o. Балка C обозначает примерную длину схвата в зжатом состояние. Коэффициент k нужен для расчёта динамических нагрузок. Как видно из таблицы при такой конфигурации манипулятор может поднять груз массой 30 г.
3: Разработка 3D модели и финальные расчёт.
3D модель разрабатывалась в САПР программе Creo Parametrics (Рисунок 3.0). Модель создавалась с учётом на то, что в дальнейшем эти детали будут вырезать из плоских пластиковых листов толщиной 3 мм, шириной и высотой 300 мм и 400 мм соответственно.
Первыми были разработаны балки A и B в соответствие с эталоном. Затем было разработано соединение балок A и B(Рисунок 2.0). Как видно из картинке 2.0 высота балки B увеличилась до []. Также для облегчения конструкции были проделаны отверстия в некоторых частях конструкции. Для укрепления конструкции были использованы стягивающие болты. Отверстие под серво мотор было сделано с допуском на вставку мотора.
