Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
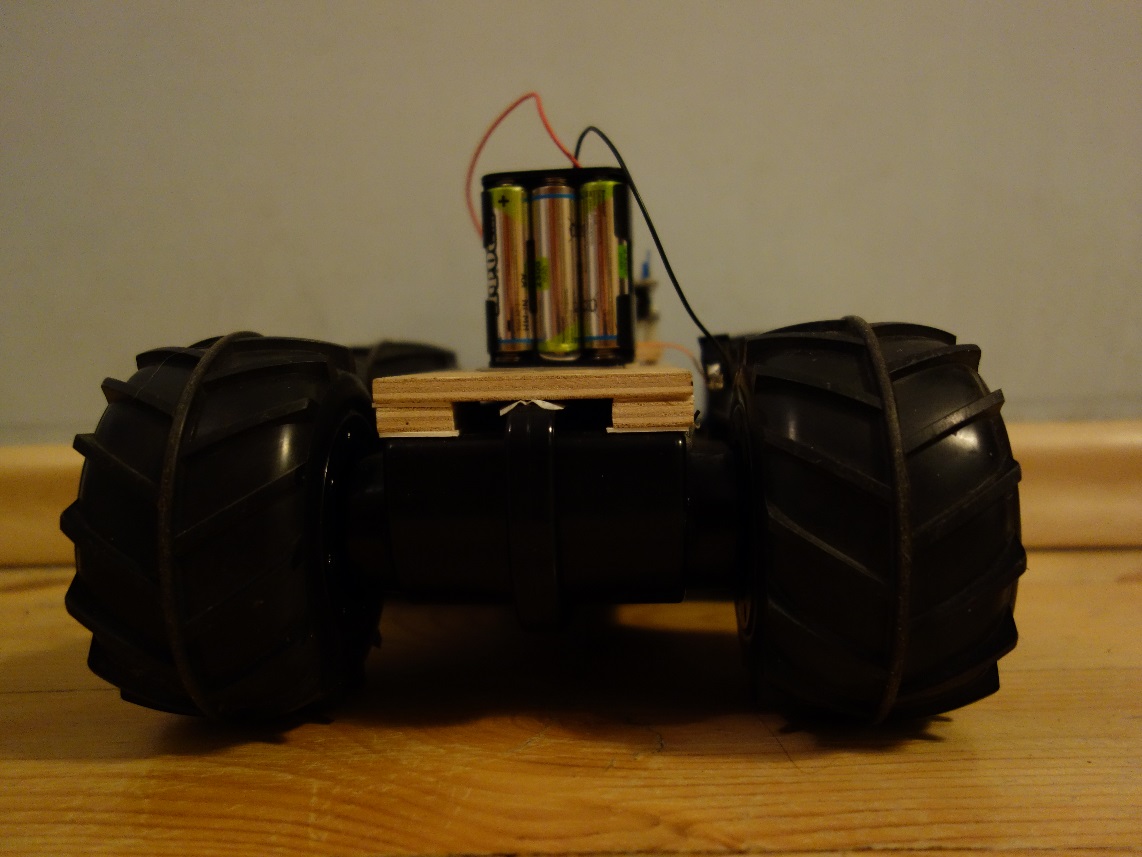
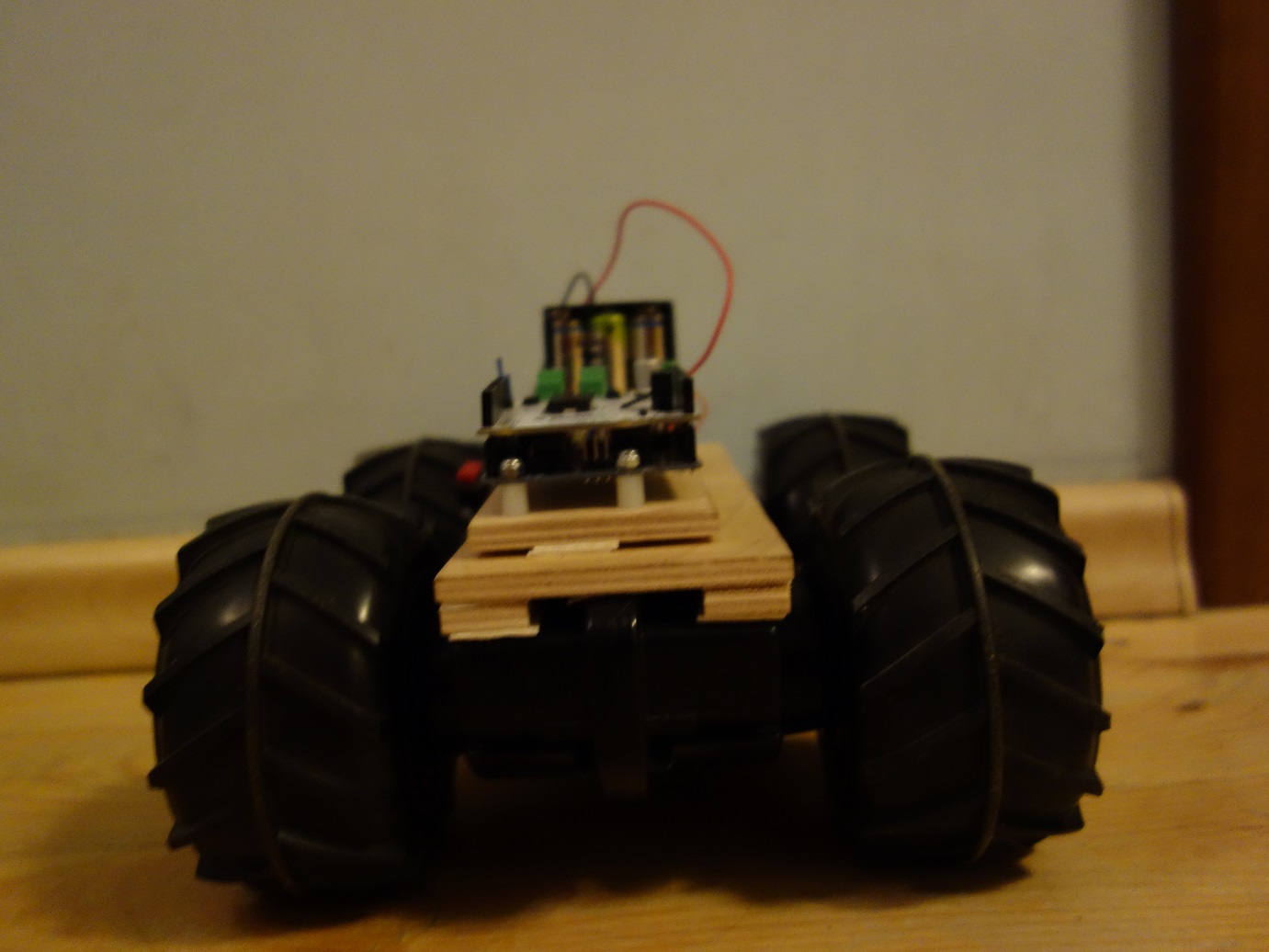
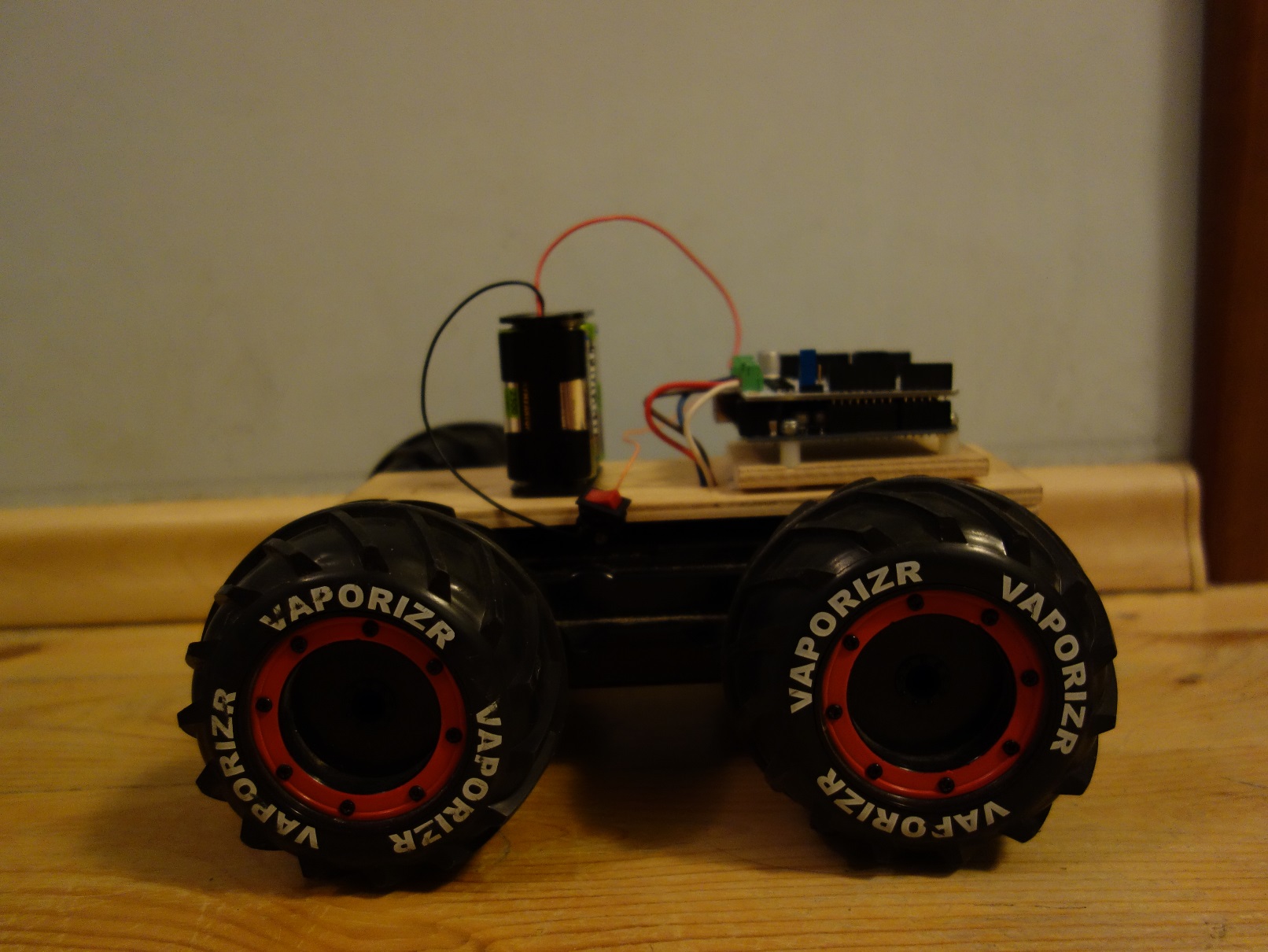
Робот собран на базе автомобиля на радиоуправлении "nikko vaporizr".
Он оснащен полным приводом танкового типа.
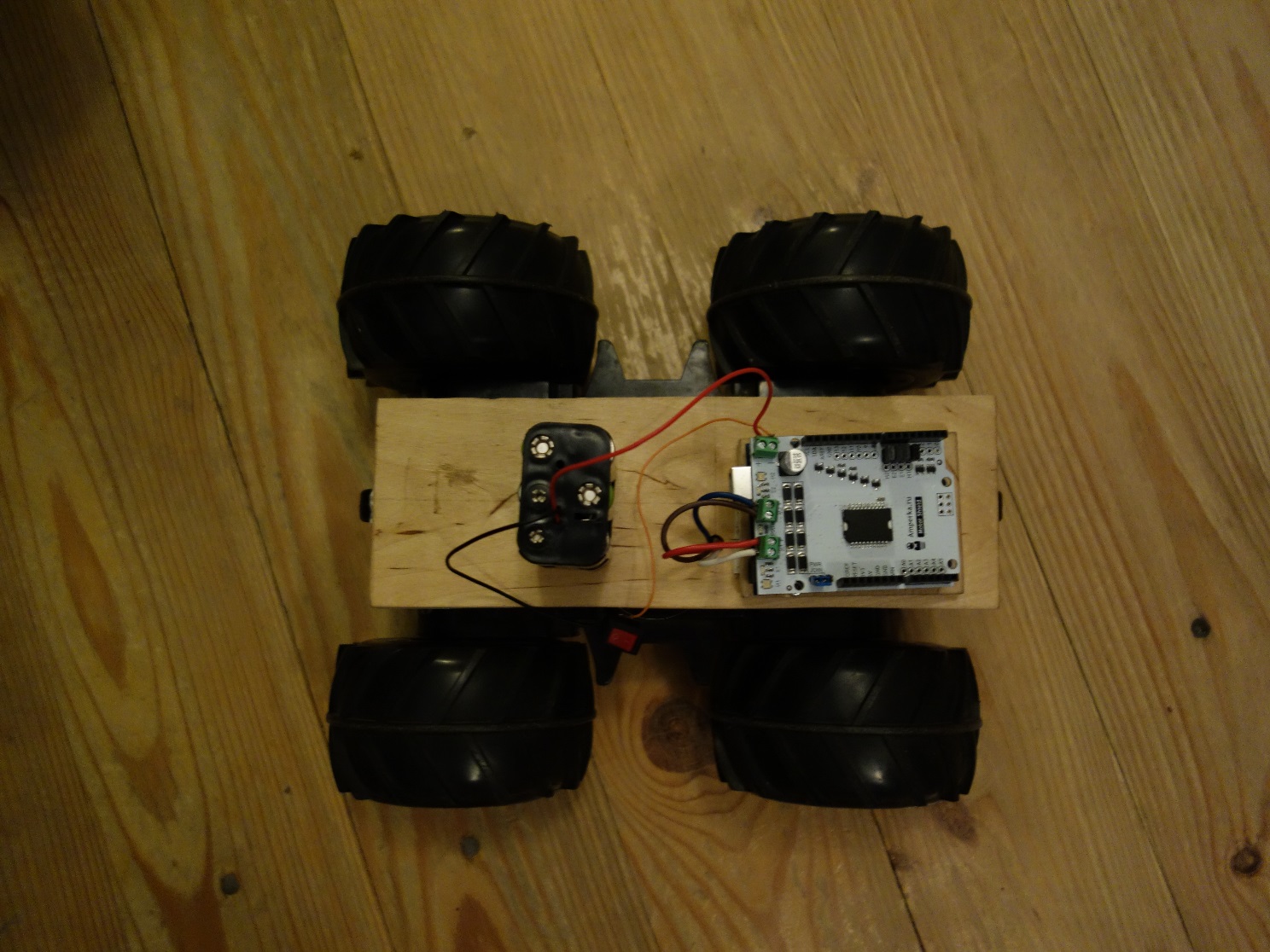
Управляется с помощью контроллера "Arduino" на роботе и контроллере "Arduino" в пульте управления.
Для передачи команд используются радиомодули NRF24L01+ увеличенной дальности.
Для управления моторами используется плата расширения "Motor Shield"
в пульте управления используется плата расширения "Joystick Shield v1.a"
Робот готов не полностью, уже смоделирован манипулятор для робота который планируется напечатать на 3D принтере
в ближайшее время, заказана камера для передачи изображения.