

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лабораторная работа № 6.
Программируемый логический контроллер Fatek. Модуль аналогового ввода
Цель работы
Изучение модуля аналогового ввода программируемого логического контроллера (ПЛК) FATEK FBs-20MC. Программирование аналогового ввода контроллера.
Задачи
Создание простых программ взаимодействия контроллера FATEK FBs-20MC с модулем аналогового ввода с помощью среды программирования WinProLadder.
Теоретическая часть
3.1. Модули ввода аналоговых сигналов – общие сведения
Устройства (модули) ввода-вывода являются интерфейсом между процессором ПЛК и реальным миром. Обмен данными с модулем ввода-вывода выполняется по адресу, который обычно записывается в ПЗУ модуля.
Разнообразие физических явлений порождает разнообразие датчиков, для каждого из которых существует соответствующее устройство ввода. Для унификации (сокращения числа типов) модулей ввода используют устройства нормирования сигналов, которые преобразуют измеряемую физическую величину в стандартный электрический сигнал, соответствующий ГОСТ 26.011-80 и ГОСТ Р 51841-2001. Фактически в промышленной автоматизации используются следующие стандартные диапазоны аналоговых сигналов: 0...10 В, 0... ±10 В, 1...5 В и 4...20 мА, 0...20 мА.
Применение стандарта позволяет изготовить всего один тип универсального устройства ввода со стандартными диапазонами для всех типов датчиков со стандартными выходными сигналами. Однако для таких датчиков, как термопары, термопреобразователи сопротивления, в силу их широкой распространенности нормирующие преобразователи встраивают в сами модули ввода. Поэтому кроме универсальных модулей ввода получили распространение специализированные модули ввода сигналов термопар, термопреобразователей сопротивления и тензорезисторов.
Типовую структуру модулей ввода аналоговых сигналов рассмотрим на примере серии RealLab! фирмы НИЛ АП. На рис. 6.1 приведена структура модуля NL-4RTD серии, однако она является типовой и на ее примере можно рассмотреть базовые принципы построения современных модулей ввода аналоговых сигналов.
Основной частью модуля ввода является аналого-цифровой преобразователь (АЦП). Обычно используют один АЦП для ввода нескольких (обычно 8 или 16) аналоговых сигналов. Для подключения источников сигнала к АЦП используется аналоговый коммутатор на МОП-транзисторах. Ввод нескольких сигналов выполняется последовательно во времени. В случаях, когда необходим одновременный ввод, используют модули, в которых каждый канал имеет свой АЦП.
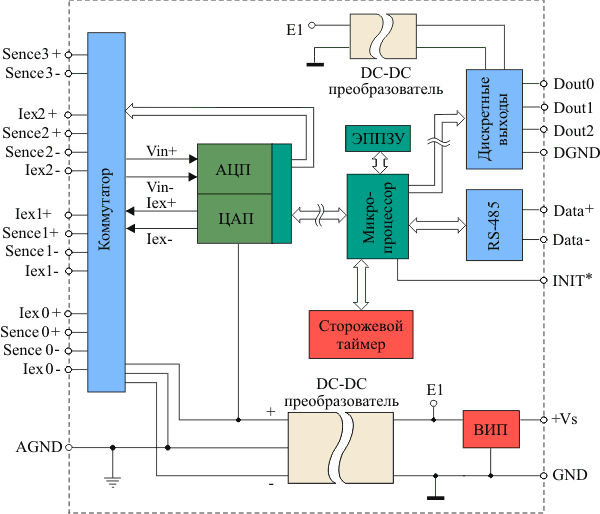
Рис. 6.4. Структура модуля для ввода сигналов термопреобразователей сопротивления
В модулях ввода обычно используют дифференциальные входы, которые позволяют выполнить более помехозащищенный канал передачи аналогового сигнала по сравнению с одиночными (не дифференциальными) входами. Некоторые модули позволяют программно задавать конфигурацию входов: дифференциальные или одиночные.
Входные цепи устройств ввода принято защищать от статического электричества, от повышенного напряжения, от изменения полярности. Для защиты используют специальные микросхемы защиты, в которых активным элементом является МОП-транзисторный ключ.
Модули ввода могут иметь программно переключаемые диапазоны входных сигналов: например, диапазоны ±15 мВ, ±50 мВ, ±100 мВ, ±500 мВ, ±1 В, ±2,5 В, ±20 мА. Диапазоны измерений для каждого входа могут задаваться индивидуально.
Современная элементная база позволяет строить недорогие модули аналогового ввода с погрешностью измерений ±0,05%.
Для коммутации входных ключей модуля используется программа, исполняемая микроконтроллером. Эта процедура достаточно проста и для ее выполнения можно использовать микроконтроллер, входящий в состав некоторых АЦП (именно такой АЦП использован в схеме на рис. 6.1). Это позволяет уменьшить количество каналов гальванической развязки между аналоговыми входами и портом RS-485.
Микропроцессор типового модуля ввода выполняет следующие функции:
- реализует протокол обмена с ПЛК; исполняет команды, посылаемые ПЛК в модуль; реализует выполнение функций автоматической калибровки, диагностики обрыва или короткого замыкания в цепи датчика; преобразует форматы вводимых данных (инженерный формат - в единицах измеряемой величины, шестнадцатеричный формат, проценты от диапазона измерений); устанавливает скорость обмена с ПЛК (для ПЛК с распределенными модулями ввода-вывода); выполняет цифровую фильтрацию входного сигнала.
В постоянной памяти ЭППЗУ модуля хранятся калибровочные коэффициенты, адрес модуля, программа, таблицы линеаризации нелинейных характеристик термопар и термопреобразователей сопротивления. Сторожевой таймер выполняет перезагрузку (сброс) микроконтроллера в случае его зависания.
В модуле ввода на рис. 6.1 имеются каналы вывода дискретных сигналов. Это позволяет реализовать на одном модуле ПИД-регулятор с широтно-импульсным (ШИМ) управлением исполнительным устройством.
Питание внутренних узлов модуля выполняется от внутреннего стабилизатора напряжения, который позволяет подавать внешнее напряжение питания в широком диапазоне, обычно от 10 до 30 В.
Цепи питания модулей защищаются от неправильной полярности напряжения питания и от превышения напряжения питания над допустимым значением. Защита выполняется диодами, стабилитронами, позисторами и плавкими предохранителями.
Для интерфейса RS-485 используется защита от статического электричества, от электромагнитных импульсов, от короткого замыкания и перегрева выходного каскада.
Для чтения данных со входов модуля, изменения входного диапазона, частоты обмена и выполнения других функций процессор ПЛК посылает в модули команды. Команды могут иметь текстовый формат (так сделано в протоколе DCON и Modbus ASCII) или шестнадцатеричный (как, например, в протоколе Modbus RTU).
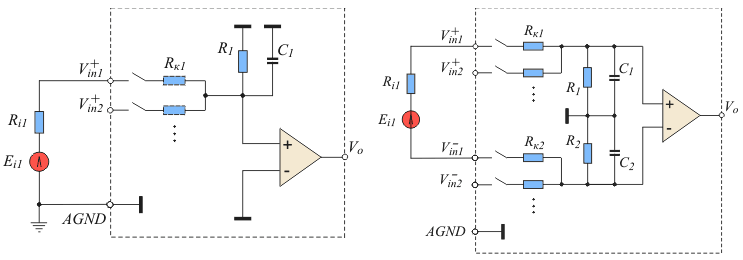
Потенциальные входы модулей аналогового ввода (рис. 6.2) используются для измерения напряжений.
а) б)
Рис. 6.2. Потенциальный одиночный (а) и дифференциальный (б) вход
Идеальный потенциальный вход имеет бесконечно большое сопротивление и нулевую емкость, поскольку при подключении к измеряемой цепи он не должен влиять на ее динамические или статические характеристики.
В реальных условиях внутреннее сопротивление источника сигнала и сопротивление открытого ключа образуют делитель напряжения с входным сопротивлением на постоянном токе и емкостью в динамическом режиме. Поэтому полное входное сопротивление модуля ввода вносит методическую мультипликативную погрешность в результат измерения. Типовыми значениями входных параметров являются Rk1 = 200 Ом, R1 = 20 МОм, C1 = 1 нФ, поэтому для обеспечения методической погрешности величиной 0,01% сопротивление источника сигнала должно быть не более 2 кОм. Однако, поскольку указанная погрешность не зависит от напряжения источника сигнала, ее можно скомпенсировать в контролере или модуле ввода.
Резисторы R1, R2 и конденсаторы C1, C2 образуют фильтр низкой частоты первого порядка, который вносит также динамическую погрешность в результат измерения. Динамическая погрешность зависит от формы входного сигнала.
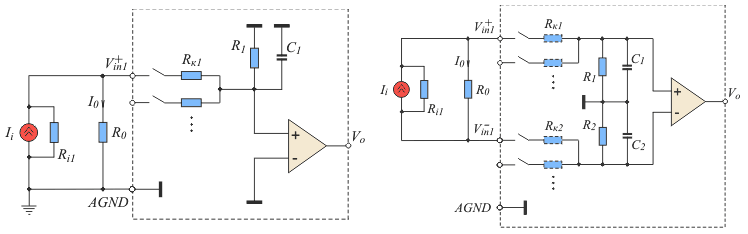
Токовые входы модулей ввода (рис. 6.3) используются для ввода величины тока, например, стандартного сигнала 4...20 мА.
а) б)
Рис. 6.3. Токовый вход на основе одиночного (а) и дифференциального (б) потенциального входа
Преобразование тока в напряжение выполняется с помощью резистора R0 с сопротивлением 125 Ом, 250 Ом или 500 Ом, максимальное падение напряжения на котором составляет, соответственно, 2,5 В, 5 В или 10 В. Измерительные резисторы могут быть установлены снаружи модуля ввода (на его входных клеммах) или внутри.
Измерительные резисторы могут быть прецизионными, тогда для получения точных измерений достаточно откалибровать модуль только в режиме ввода напряжений. При использовании резисторов низкой точности их погрешность можно скомпенсировать путем калибровки модуля совместно с измерительным резистором, в режиме измерения тока. Однако для этого необходимо выполнить калибровку каждого канала отдельно. Если модуль не позволяет выполнять индивидуальную калибровку каждого канала, то формулу для внесения поправок и ее коэффициенты можно сохранить в ОРС сервере или флэш-памяти ПЛК.
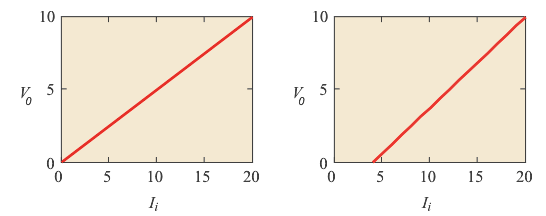
При использовании диапазона токов 0...20 мА ток преобразуется в напряжение по формуле![]()
![]() , для диапазона 4…20 мА – по формуле
, для диапазона 4…20 мА – по формуле ![]()
![]() (рис. 6.4).
(рис. 6.4).
а) б)
Рис. 6.4. Преобразование тока в выходной сигнал для диапазона 0…20 мА (а) и 4…20 мА (б)
При этом току 4 мА соответствует выходной сигнал, равный нулю. Смещение уровня нуля на 4 мА необходимо для обеспечения возможности диагностирования обрыва в цепи датчика.
3.2. Модуль аналогового ввода FBs-6AD для контроллеров FATEK компании FATEK Automation
Компания FATEK Automation Corp., Тайвань, выпускает моноблочные контроллеры серий FBe и FBs, модули расширения, коммуникационные модули и программное обеспечение контроллеров WinProLadder.
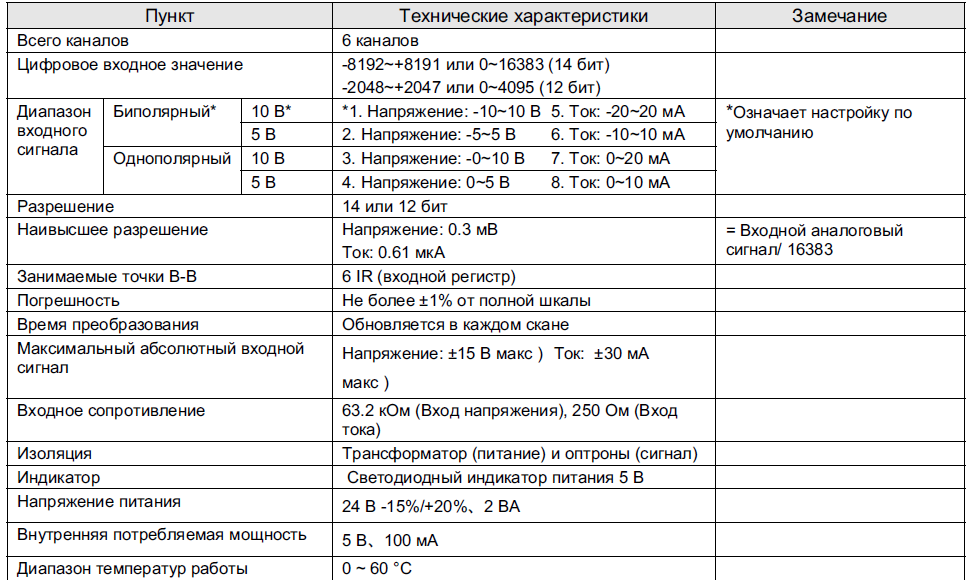
Входной аналоговый модуль FBs-6AD – это один из входных аналоговых модулей для ПЛК компании FATEK серии FBs. В нем содержится 6 каналов аналого-цифрового преобразования (АЦП) входного аналогового сигнала в форме напряжения или тока с эффективным разрешением 12 или 14 бит (табл. 6.1). Измерение разных сигналов тока и напряжения достигается за счет настройки внутренних перемычек модуля. Считываемое значение представлено 14-разрядным кодом независимо от эффективного разрешения 12 или 14 бит. Для фильтрации шумов и помех модуль также обеспечивает функцию усреднения входных выборок.
Таблица 6.1. Основные технические характеристики модуля FBs-6AD
Порядок использования аналогового выходного модуля FBs-6AD представлен на рис. 6.5.
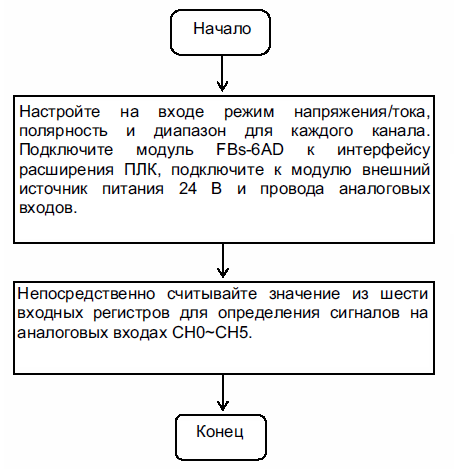
Рис. 6.5. Порядок использования аналогового входного модуля FBs-6AD
Распределение адресов для аналоговых входов ПЛК FBs-PLC.
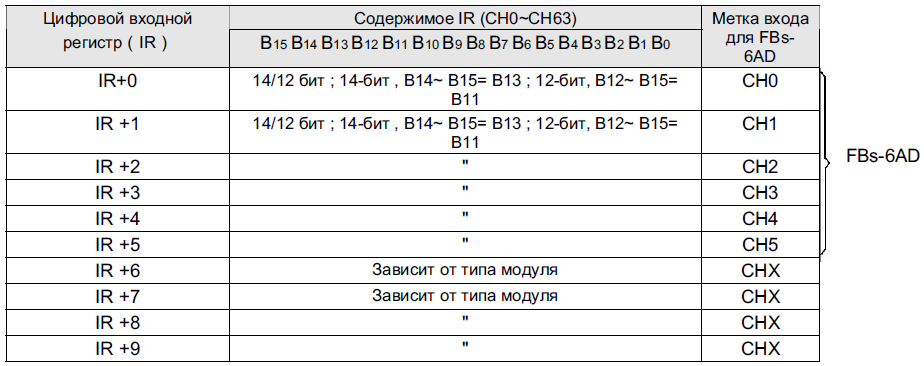
Модуль FBs-6AD обеспечивает 6 точек аналоговых входов. Адресация входов-выходов модулей начинается с ближайшего к главному блоку модуля, его каналы последовательно нумеруются как CH0…CH1 (первый модуль), CH2…CH3 (второй модуль), CH4…CH5 (третий модуль) и увеличиваются от модуля к модулю. Всего имеется 64 канала и они соответствуют внутренним аналоговым входным регистрам ПЛК (так называемым регистрам IR) R3840…R3903. В табл. 6.2 перечислены регистры IR (R3840…R3903), соответствующие расширению аналоговых входов (CH0…CH63).
Таблица 6.2. Распределение адресов аналогового ввода для FBs-6AD
После подключения модуля FBs-6AD к интерфейсу расширения ПЛК FBs-PLC автоматически определит количество точек аналого-цифрового ввода и пошлет значения соответствующих входов в каждый модуль FBs-6AD. После подключения к ПЛК программа WinProladder обнаруживает и вычисляет входные регистры. Чтобы узнать точные адреса ввода-вывода каждого модуля расширения для программирования, пользователи могут использовать окно I/O Module Number Configuration в программе WinProladder.
Описание аппаратуры модуля FBs-6AВ (рис. 6.6).
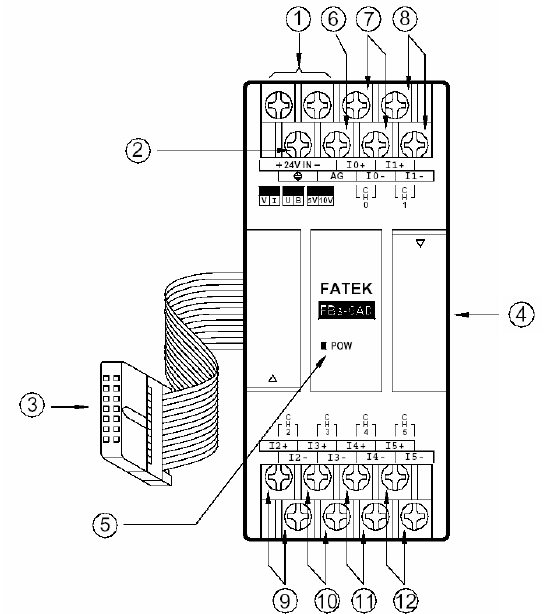
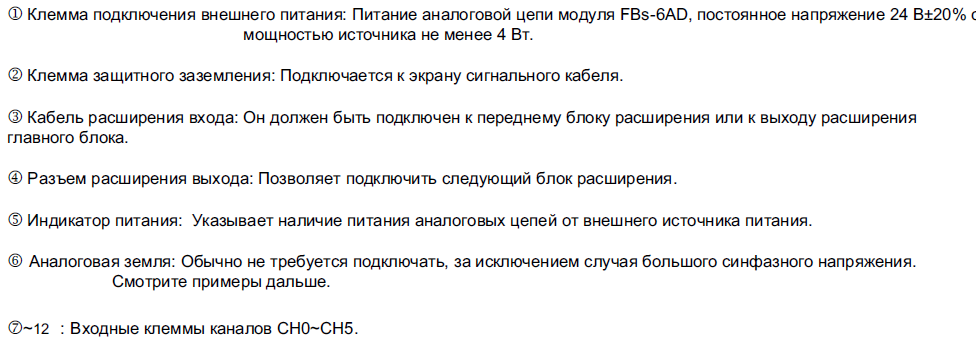
Рис. 6.6. Модуль FBs-6AD
Схема входной цепи модуля FBs-6AD (рис.6.7).

Рис. 6.7. Схема входной цепи модуля FBs-6AD
Пример зависимости входного кода от значения входных сигналов модуля (биполярный режим 10В или 20мА) показан на рис. 6.8.
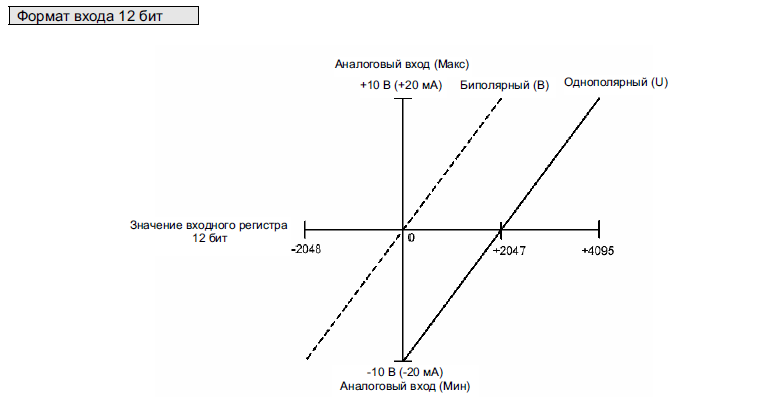
Рис. 6.8. Зависимость входного кода от значения входных сигналов модуля (биполярный режим 10В или 20мА)
Заводские настройки по умолчанию для модуля FBs-6AD:
- Формат входного кода – биполярный (-8192 … 8191), Тип и диапазон входного сигнала – биполярное напряжение (-10 В … +10 В).
3.3. Основные функциональные инструкции для программы на языке LD.
Пересылка 08.MOV.
Установка SET и Сброс RST.
Сложение 11.(+).
Вычитание 12.(-).
Переход вверх (рис. 6.9).
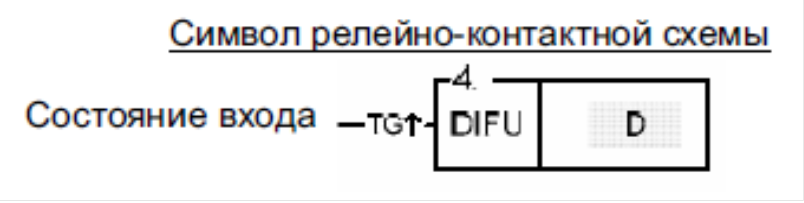
Рис. 6.9. Функциональная инструкция Переход вверх
D – номер конкретной катушки, в которой сохраняется результат операции Переход вверх.
Инструкция DIFU используется для формирования импульсного сигнала, образующегося при изменении состояния на входе TG↑ от 0 к 1 (нарастающий фронт) с длительностью одного скана. Импульсный сигнал сохраняется в катушке, указанной в D.
Функцию этой инструкции выполняет также контакт TU.
Примеры (рис. 6.10):
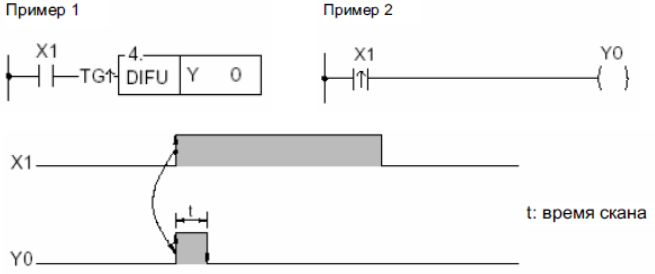
Рис. 6.10. Пример использования инструкции Переход вверх
Переход вниз (рис. 6.11).
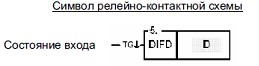
Рис. 6.11. Функциональная инструкция Переход вниз
D – номер конкретной катушки, в которой сохраняется результат операции Переход вниз.
Инструкция DIFD используется для формирования импульсного сигнала, образующегося при изменении состояния на входе TG↓ от 1 к 0 (спадающий фронт) с длительностью одного скана. Импульсный сигнал сохраняется в катушке, указанной в D.
Функцию этой инструкции выполняет также контакт TD.
Примеры (рис. 6.112):
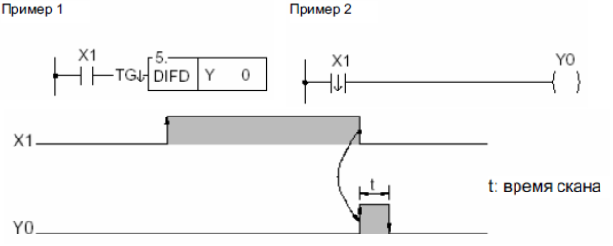
Рис. 6.12. Пример использования инструкции Переход вниз
Сравнение (рис. 6.13).
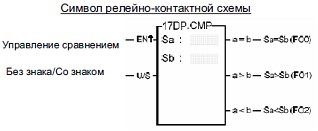
Рис. 6.13. Функциональная инструкция Сравнение
Sa – регистр с данными для сравнения.
Sb – регистр с данными для сравнения.
Сравнивает данные в Sa и Sb, если вход управления сравнением EN = 1 или EN↑ изменяется от 0 к 1 (импульсная инструкция P). Если данные Sa равны данным Sb, то FO0 устанавливается в 1. Если данные Sa > Sb, то FO1 устанавливается в 1. Если данные Sa < Sb, то FO2 устанавливается в 1.
Если требуется получить составные результаты, например ≤, ≥, <> и т. п., то сначала нужно переслать простые результаты =, < и > в реле, а затем получить составной результат с помощью логической схемы из контактов этих реле.
Пример (рис. 6.14):
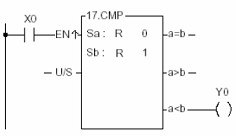
Рис. 6.14. Пример использования инструкции Сравнение
3.4. Двухпозиционный регулятор
По виду закона регулирования (алгориту работы) все регуляторы, применяемые в системах управления, делятся на:
- релейные (позиционные), непрерывные.
Релейные (позиционные) регуляторы выдают управляющий сигнал, который обеспечивает перемещение регулирующего органа в одно из фиксированных положений (позиций). Их может быть два, три и более. По количеству позиций различают двух-, трех - и многопозиционные регуляторы.
К непрерывным регуляторам относятся П-, ПИ-, ПИД-регуляторы, которые по сравнению с релейными регуляторами обеспечивают более высокое качество регулирования и находят широкое применение в АСУТП.
Двухпозиционные регуляторы обеспечивают хорошее качество регулирования для инерционных объектов с малым запаздыванием, не требуют настройки и просты в эксплуатации. Эти регуляторы представляют обычный и наиболее широко распространенный метод регулирования. Двухпозиционные регуляторы используются для управления переключательными элементами - дискретными исполнительными устройствами:
- электромеханическими реле, контакторами, транзисторными ключами, симисторными или тиристорными устройствами, твердотельными реле и др.
В простейшем случае (без обратной связи) двухпозиционный регулятор работает как двухпозиционный переключатель. Например, мощность, подаваемая на нагреватель, имеет только два значения - максимальное и минимальное (нулевое), две позиции (отсюда и название регулятора - двухпозиционный) - нагреватель полностью включен или полностью выключен. Структурная схема двухпозиционной системы регулирования приведена на рис. 6.15.

Рис. 6.15. Структурная схема двухпозиционной системы регулирования
Обозначения на рис. 6.15:
АР – двухпозиционный регулятор,
ОУ – обьект управления,
SP – узел формирования заданной точки (задания),
Е – рассогласование регулятора,
PV=X – регулируемая величина,
Y – управляющее воздействие,
Z – возмущающее воздействие.
Для предотвращения «дребезга» управляющего выходного устройства (например, реле) и исполнительного механизма (например, нагревательного элемента) вблизи задания SP (слишком частого включения нагревателя), предусматривается гистерезис Н. Например, описание работы двухпозиционной системы регулирования температуры в печи с помощью нагревателя, может быть представлено следующим образом:
- Нагреватель включен, пока температура в печи (X=PV) не достигнет значения заданной точки SP. Выход регулятора Y (нагреватель) отключается, если регулируемая величина (температура) выше заданной точки SP. Повторное включение нагревателя происходит после уменьшения температуры до значения SP-H, т. е. с учетом гистерезиса H переключательного элемента.
Алгоритм двухпозиционных регуляторов определяется статической характеристикой: зависимостью выходного сигнала Y от входного Х (рис. 6.16).
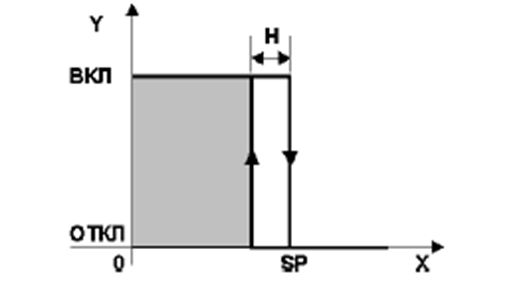
Рис. 6.16. Статическая характеристика двухпозиционной системы регулирования
Выходная величина Y равна максимальному воздействию - нагреватель включен: Y = max при X<SP-H, где H-значение гистерезиса.
Выходная величина Y равна минимальному воздействию - нагреватель выключен: Y = 0 при X > SP.
При работе в зоне гистерезиса, когда SP-H < X < SP, переключение регулятора между максимальным и минимальным воздействиями зависит от текущего состояния регулятора. Если регулятор находится в состоянии с максимальным воздействием, то его переключение на минимальное воздействие происходит по правой ветви статической характеристики. Если регулятор находится в состоянии с минимальным воздействием, то его переключение на максимальное воздействие происходит по левой ветви характеристики. Эти переключения показаны на рис. 6.16 стрелками.
Двухпозиционный регулятор в электронном исполнении реализуется триггером Шмитта, имеющим два характерных пороговых напряжения – срабатывания (SP) и отпускания (SP – H). При программной реализации двухпозиционного регулятора необходимо предусмотреть элемент памяти для запоминания текущего состояния регулятора.
Ширина зоны гистерезиса в современных двухпозиционных регуляторах является единственным программируемым параметром настройки. Основные варианты представления зоны гистерезиса показаны на рис. 6.17.
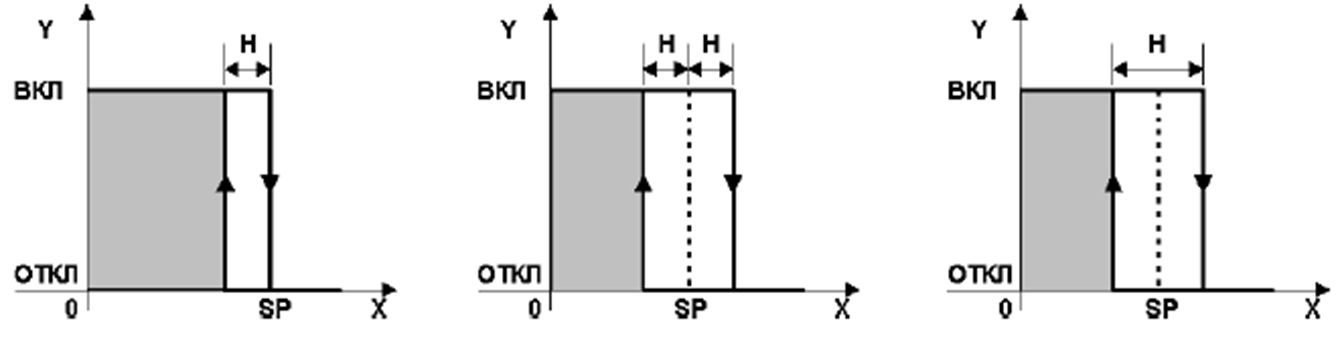
а) б) в)
Рис. 6.17. Основные варианты представления зоны гистерезиса
Назначение гистерезиса Н - предотвращение «дребезга» управляющего выходного устройства (например, реле) вблизи задания SP от слишком частого включения нагревателя. Гистерезис (в некоторых типах регуляторов) может принимать как положительные, так и отрицательные значения. Точность регулирования технологического параметра, например, температуры зависит от величины гистерезиса. Чем меньше гистерезис, тем точнее регулирование, но тем чаще включается нагреватель и тем самым больше износ коммутационных элементов (например, реле). Уменьшая гистерезис, можно повысить качество регулирования до некоторого предела, определяемого параметрами обьекта регулирования (тепловой инерцией, мощностью нагревателя, тепловой связью нагревателя и обьекта и др.).
Меры безопасности
Во время выполнения лабораторной работы необходимо:
- соблюдать правила включения и выключения вычислительной техники; не подключать кабели, разъемы и другую аппаратуру к компьютеру, не относящиеся к лабораторной установке; при включенном напряжении сети не отключать, не подключать и не трогать кабели, соединяющие различные устройства компьютера; в случае обнаруженной неисправности в работе оборудования или нарушения правил техники безопасности сообщить руководителю лабораторной работы; не пытаться самостоятельно устранить неисправности в работе аппаратуры; по окончании работы привести в порядок рабочее место.
ВНИМАНИЕ! При работе за компьютером необходимо помнить: к каждому рабочему месту подведено опасное для жизни напряжение. Поэтому во время работы надо быть предельно внимательным и соблюдать все требования техники безопасности!
Описание лабораторной установки
Лабораторная установка представляет собой ПЛК FBs-20MC с подключенными модулями аналогового вывода FBs-2DA и аналогового ввода FBs-6AD. Питание от сети 220 В, 50 Гц подается на ПЛК через сетевой шнур. ПЛК соединяется с компьютером через кабель интерфейса RS-232 (порт 0 ПЛК).
К входным клеммам ПЛК подключены кнопка (вход X0) и тумблер (вход X1). К аналоговому входу CH0 модуля FBs-6AD подключен линейный потенциометр, с помощью которого можно вручную изменять входное напряжение канала CH0 в диапазоне -4…+4 В. Перемещение движка потенциометра можно измерить по шкале.
Описание используемых программных комплексов
Для программирования ПЛК FBs-20MC используется программное обеспечение WinProLadder, которое должно быть установлено на компьютере.
Задание
7.1. Используя программу WinProLadder, создать новый проект. Разработать программу на языке релейно-контактных схем. Программа должна считывать из входного регистра канала аналогового ввода значения кодов, соответствующие различным перемещениям движка потенциометра.
7.2. Подключить ПЛК с помощью интерфейсного кабеля к порту RS-232 компьютера, затем с помощью сетевого шнура – к розетке электропитания. Произвести программирование ПЛК. Проверить правильность работы программы.
7.3. К входным клеммам канала CH0 модуля FBs-6DA подключить вольтметр. Изменяя положения движка потенциометра, фиксировать его перемещения по линейной шкале, измерять вольтметром напряжения на входных клеммах аналогового канала и считывать соответствующие входные коды из входного регистра. Построить зависимости входного напряжения и входного кода в зависимости от положения движка потенциометра. Построить зависимость входного кода от входного аналогового напряжения.
7.4. Используя программу WinProLadder, создать новый проект. Разработать программу реализации двухпозиционного регулятора. Величины уставки SP и гистерезиса H задать программно. Регулируемую величину X моделировать перемещением движка потенциометра. Программа должна обеспечивать переключение выходного реле ПЛК в соответствии с правилами работы двухпозиционного регулятора.
7.5. Произвести программирование ПЛК. Проверить правильность работы программы. К входным клеммам канала модуля FBs-6AD подключить вольтметр, наблюдать изменение входного напряжения. Построить зависимости состояния выходных реле ПЛК от положения движка потенциометра и от входного напряжения.
Методика выполнения задания
8.1. При создании релейно-контактной схемы использовать сведения о функциональных инструкциях и приемы программирования, описанные в лабораторных работах № 4 и № 5.
8.2. Для выполнения п. 7.4 задания необходимо разработать принцип функционирования программной модели двухпозиционного регулятора с использованием функциональных инструкций, описанных в разделе 3 и в лабораторных работах № 4 и № 5. Варианты моделей регулятора:
- Вариант 1 – рис. 6.17, а); Вариант 2 – рис. 6.17, б).
Требования к содержанию и оформлению отчета
Отчет по лабораторной работе должен содержать:
- краткие теоретические сведения; формулировку задания на лабораторную работу; описание последовательности выполнения работы; изображение рабочих окон с диаграммой программы; выводы по лабораторной работе.
