


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Моделирование сложных систем
УДК
, к. т.н., доцент
, студент
Санкт-Петербургский государственный
электротехнический университет «ЛЭТИ»
ПРИМЕНЕНИЕ НЕЙРОНЕЧЕТКОГО ПОДХОДА ПРИ СОЗДАНИи
СИСТЕМЫ УПРАВЛЕНИЯ ПЕРЕВЕРНУТОГО ДВУХЗВЕННОГО МАЯТНИКА
Аннотация
В данной статье дается обзор решения задачи стабилизации и оптимизации движения перевернутого двухзвенного мятника с применением нейро-нечеткого подхода. Дается обзор нейронечетких систем и их использование в задачах управления. Особое внимание уделяется адаптивным нейронечетким системам ANFIS (Adaptive Neuronale Fuzzy Inference System). Предлагается методика проектирования и оптимизации нечеткого регулятора на основе ANFIS с помощью средств MatLAB.
Ключевые слова: нейронечеткий подход, маятник, состояние равновесия, оптимизация, нечеткие системы управления.
Abstract
This article provides an overview of solving the problem of the stabilization and optimization of two-specimen of the movement inverted using neuro-fuzzy approach. A review of neuro-fuzzy systems and their use in control problems. Particular attention is paid to the adaptive neuro-fuzzy system ANFIS (Adaptive Neuronale Fuzzy Inference System). The technique of designing and optimizing the fuzzy controller based on ANFIS using MatLAB funds.
Keywords: neuro-fuzzy approach, pendulum, equilibrium, optimization, fuzzy control system.
При создании систем управления сложными объектами обычно используются классические методы регулирования: модальное и оптимальное регулирование. Традиционно системы автоматизированного управления строятся на основе линейных моделей объектов. Полученные таким образом регуляторы являются оптимальными и устойчивыми по отношению к объектам управления, но зачастую методы линеаризации, которые применяются к нелинейным, динамическим и нечетко определенным объектам не дают ожидаемых результатов устойчивого управления и требуемого качества управления процессом. По мере увеличения сложности объекта использовать классические методы управления становится все труднее.
Одним из наиболее распространенных альтернативных методов построения систем управления объектами, для которых аналитическая модель не получена и которые нечетко определенны с точки зрения классической теории, является использование нечеткой логики [1].
На сегодняшний день наиболее эффективной и перспективной технологией в проектировании систем управления является технология применения адаптивных нейронечетких сетей для оптимизации нечетких систем управления «ANFIS» (Adaptive Neuronale Fuzzy Inference System). Такая технология использует нейронечеткий подход и совмещает в себе преимущества нечетких систем управления и нейронный сетей.
В данной статье рассмотрен один из вариантов решения задачи стабилизации и оптимизации движения двухзвенного перевернутого мятника с применением классических методов, модального и оптимального управления, а также на основе нейронечеткого подхода.
Целью построения системы управления двухзвенным перевернутым маятником является разработка регулятора состояния с последующей оптимизацией параметров объекта управления.
В качестве регулятора состояния рассматривается модальный регулятор. Модальное управление относится к корневым методам синтеза линейных САУ. Исходя из заданных показателей качества управления, определяется желаемое расположение корней характеристического полинома. Для построения регулятора состояния используется следующий алгоритм:
![]() (1)
(1)
Заданы следующие параметры объекта управления: m1 = 1.5 кг – масса первого маятника; m2 = 0.7 кг – масса второго маятника; l =0.7м – длина стержня; IA =0.0002 кг·м2– момент инерции двигателя. Выбираются желаемые значения корней характеристического полинома: p =[ -1,-3,-5,-9]T. Так как объект полностью управляем, то можно сказать, что есть такая матрица коэффициентов обратных связей К, что собственные значения матрицы состояния замкнутой системы (A – B*K) будут иметь желаемые корни. Матрица коэффициентов находится с помощью программы Matlab: K = [ -2.0374 -100.4168 -28.1683 -27.8053]. При малых отклонениях маятника линейный регулятор состояния обеспечивает устойчивость положения равновесия. При заданных параметрах объекта максимальные значения углов отклонения получились равными ц0max=0.100 рад; ш0max = 0.077 рад, где ц0–угол отклонения первого звена маятника, ш0 – угол отклонения второго звена маятника. При увеличении параметров объекта на 10% значения максимальных углов отклонения маятника уменьшаются и становятся равными ц0max=0.080 рад; ш0max = 0.07 рад. При уменьшении параметров объекта на 30% значения максимальных углов отклонения маятника увеличиваются и становятся равными ц0max=0.15 рад ; ш0max = 0.13 рад. Стоит отметить, что при использовании в качестве регулятора состояния оптимального регулятора процессы в системе аналогичны тем, что получаются в ходе использования модального регулятора.
Для оценки возможности увеличения начальных отклонений углов звеньев маятника проводится построение и оптимизация нечеткого регулятора с помощью средств математического пакета MatLAB с использованием ANFIS-технологии как одного из нейронечетких подходов [2]. Построен регулятор на основе нечеткого алгоритма Такаги-Сугено. Процедура обучения адаптивной нейронечеткой сети проводится с помощью гибридного алгоритма обучения: метода обратного распространения ошибки и метода наименьших квадратов на основе числового набора входных и выходных данных, объединенных в единую базу данных.
Получить соответствующий набор числовых входных и выходных данных можно используя построение и моделирование системы управления с регулятором состояния в программе MatLAB Simulink, имитируя различные режимы работы системы путем изменения параметров объекта управления и дальнейшей оптимизацией системы на основе законов модального или оптимального управления.
Математическая модель системы управления перевернутым двухзвенным маятником с нечетким регулятором состояния с 4-мя входными и одной выходной переменной представлена в виде блок-схемы Simulink[3]. С помощью блока мультиплексора `Mux2` выделяется необходимый вектор состояния системы и подается на вход нечеткого регулятора `Fuzzy Logic Controller`. Выходом нечеткого регулятора будет отклонение угла первого маятника. Полученная объединенная блок-схема модального и нечеткого регуляторов представлена на рисунке 1.
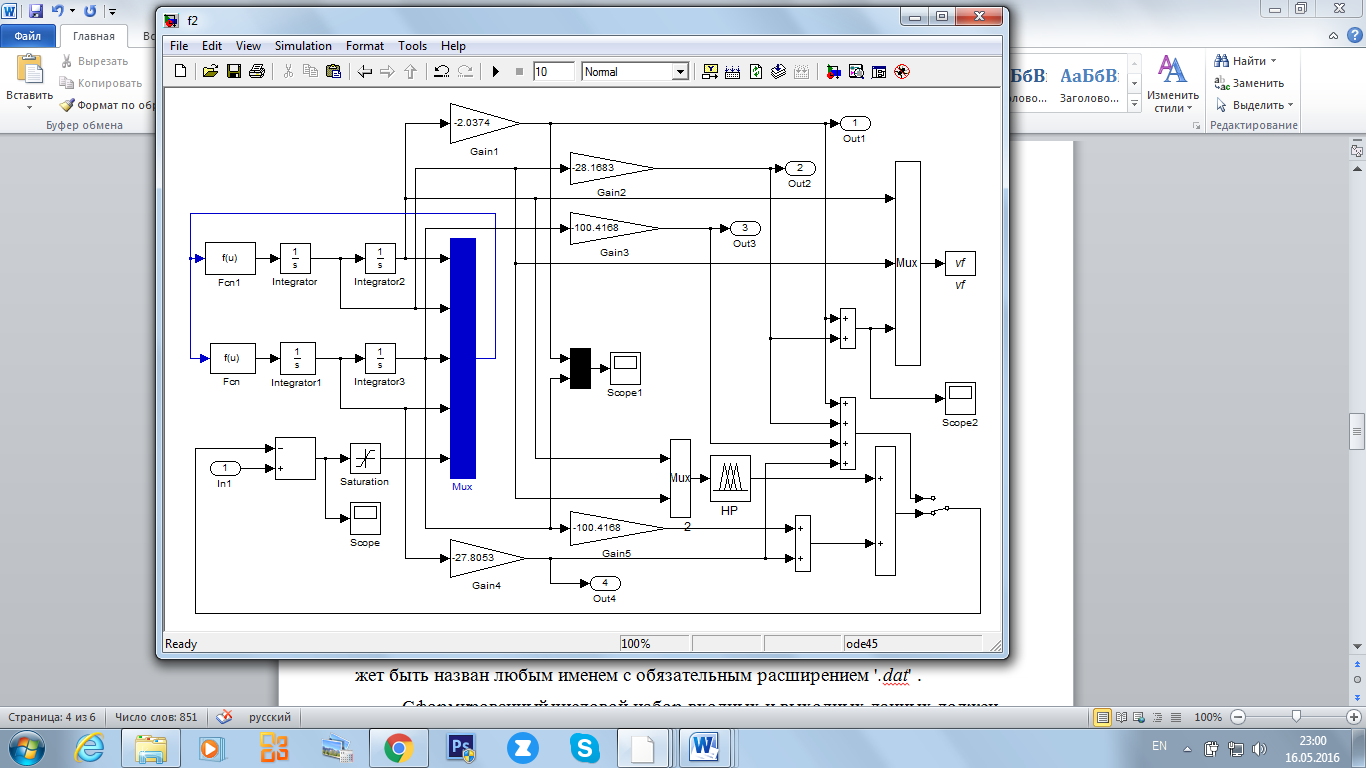
Рисунок 1 – Блок-схема системы управления перевернутым двухзвенным маятником с нечетким и модальным регуляторами
Сформированный числовой набор входных и выходных данных должен описывать оптимальный режим работы системы. Полученный набор величин входных и выходных переменных объединяется в единую базу данных. Сформировать структуру нечеткого регулятора и обучить соответствующую ей ANFIS-систему можно как с использованием процедур MatLAB, так и воспользовавшись интерфейсом комплекта Fuzzy Toolbox [4]. На рисунке 2 показан интерфейс редактора ANFISи пример тестированияANFIS-систем.
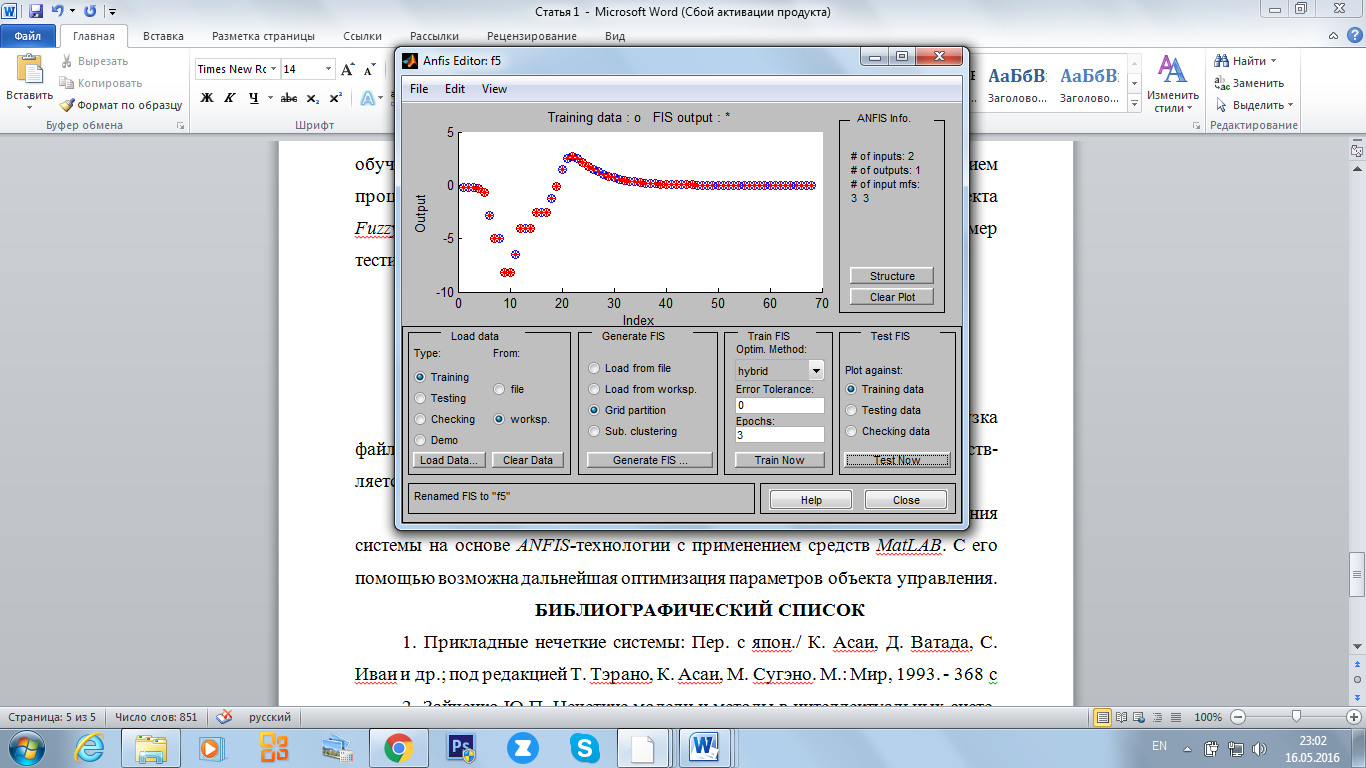
Рисунок 2 – Пример тестирования ANFIS-системы
Процесс обучения запускается нажатием кнопки TrainNow. Загрузка файла числового набора входных и выходных данных для обучения осуществляется нажатием кнопки LoadTrainingData.
Таким образом, получен и протестирован нечеткий регулятор состояния системына основе ANFIS-технологии с применением средств MatLAB. С его помощью возможна дальнейшая оптимизация параметров объекта управления. При заданных параметрах объекта значения отклонения углов маятника получились равными ц0max=0.100 рад; ш0max = 0.077 рад. При увеличении параметров объекта на 10% значения максимальных углов отклонения маятника уменьшаются и становятся равными ц0max=0.080 рад; ш0max = 0.07 рад. Таким образом, результаты, полученные с использованием модального и нечеткого регуляторов, совпали. При уменьшении параметров объекта на 30% значения максимальных углов отклонения маятника увеличиваются и становятся равными ц0max=0.167 рад; ш0max = 0.133 рад. Переходный процесс при таких условиях показан на рисунке 3, где переходный процесс в первом маятнике обозначен желтым цветом, а во втором – фиолетовым.
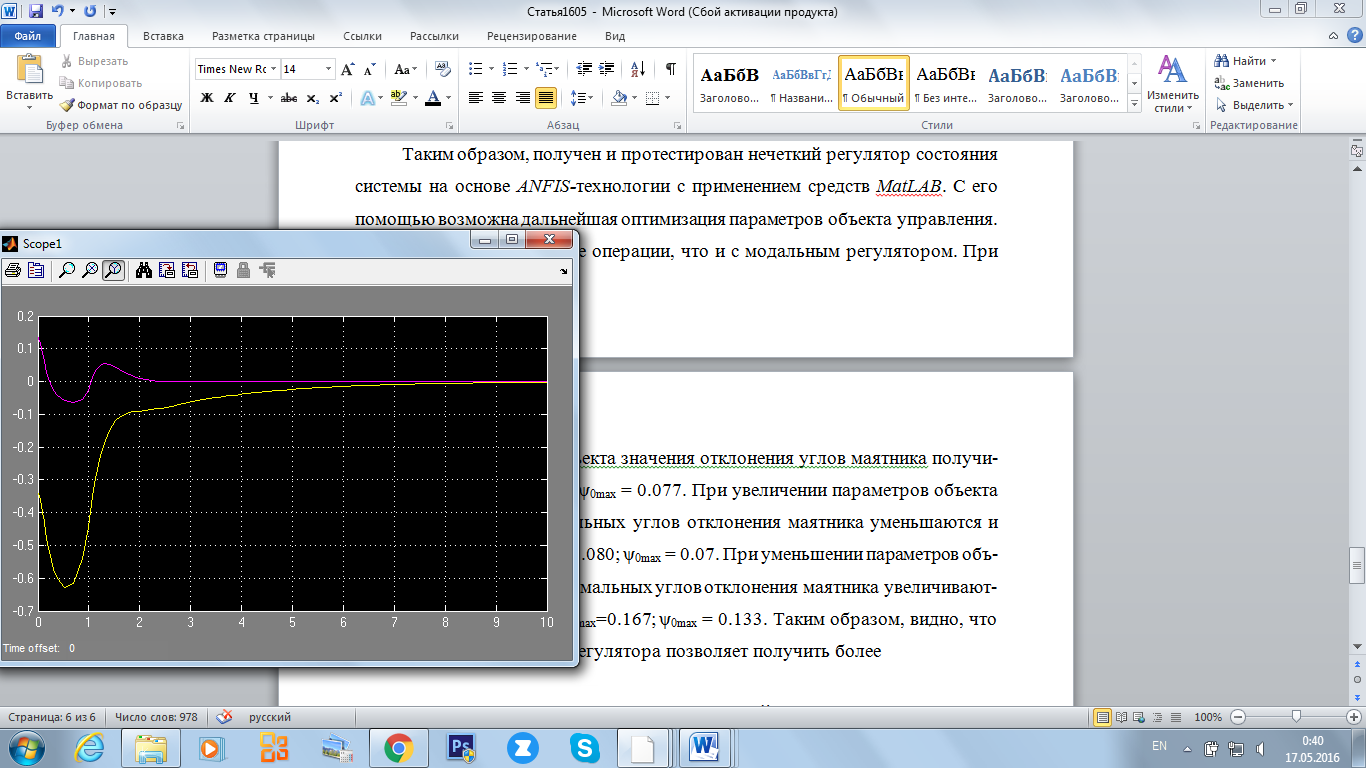
Рисунок 3 – Переходный процесс в системе с нечетким регулятором
Таким образом, видно, что использование нечеткого регулятора позволяет системе управления двухзвенным перевернутым маятником оставаться работоспособной при худших начальных условиях по сравнению с использованием в качестве регулятора модального или оптимального регуляторов. Данная работа показывает, что разработка нечетких систем управления более перспективна в этом случае и позволяет добиться лучших результатов в регулировании и оптимизации работы сложных объектов.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Прикладные нечеткие системы: Пер. с япон./ К. Асаи, Д. Ватада, С. Иваи и др.; под редакцией Т. Тэрано, К. Асаи, М. Сугэно. М.: Мир, 1993.–368 с.
2. Зайченко модели и методы в интеллектуальных системах. Киев: Изд. дом «Слово», 2008. – 344 с.
3.Мироновский в MATLAB: Учеб. пособие. СПб.:ГУАП, 2006. – 164 с.
4. Fuzzy Logic Toolbox. For use with MATLAB. User’s Guide. Version 2.0,
The MathWorks Inc., 1999 г.
