

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
г. Смоленск
Расчеты в электронных приборах, предназначенных для измерения высоты и вертикальной скорости.
Расчет высоты по сигналу датчика абсолютного давления
Обычный датчик абсолютного давления дает сигнал, пропорциональный абсолютному давлению воздуха.
U=U0 (KP+a) (1.1)
Где: U –сигнал датчика;
U0 – напряжение питания датчика;
К – коэффициент пропорциональности;
Р – величина абсолютного давления.
a – постоянное смещение датчика.
Для расчета давления, формулу (1.1) нужно привести к виду:
![]()
![]() (1.1.1)
(1.1.1)
В формуле (1.1.1) величина ![]()
![]() – это обычно то, что измеряет АЦП, когда опорное напряжение АЦП равно напряжению питания датчика, в этом случае
– это обычно то, что измеряет АЦП, когда опорное напряжение АЦП равно напряжению питания датчика, в этом случае ![]()
![]() , где N - код АЦП от сигнала датчика, и N0 - код конца шкалы АЦП. Константа б – величина обычно не нулевая, и записана в паспорте датчика. Например, для датчика абсолютного давления MPX4115A в паспорте приведена следующая формула: U=U0(0,009P-0,095). В этом датчике К=0,009, б=0,095. При напряжении питания U0 = 5 вольт, первоначальное смещение датчика равно -0,475 В, т. е. не так уж мало!
, где N - код АЦП от сигнала датчика, и N0 - код конца шкалы АЦП. Константа б – величина обычно не нулевая, и записана в паспорте датчика. Например, для датчика абсолютного давления MPX4115A в паспорте приведена следующая формула: U=U0(0,009P-0,095). В этом датчике К=0,009, б=0,095. При напряжении питания U0 = 5 вольт, первоначальное смещение датчика равно -0,475 В, т. е. не так уж мало!
Для расчета высоты иногда применяется барометрическая формула:
Н=-К*Ln(P/(P0 ) (1.2)
Где: Н – высота в метрах;
К – коэффициент пропорциональности;
P – абсолютное давление на высоте полета;
P0 – абсолютное давление на уровне аэродрома.
Формула (1.2) получена из предположения, что давление воздуха с высотой изменяется по экспоненциальной зависимости. Однако практически изменение давления отличается от экспоненты. Происходит это в основном из-за того, что температура воздуха с высотой изменяется, кроме того меняется влажность и другие параметры. Поэтому логарифмическая зависимость дает большую погрешность. Если, например, в формулу (1.2) подставить коэффициент К=-8334,411932, то на высоте 1000 метров погрешность расчета будет практически нулевой. Однако на высоте 2000 метров, погрешность достигнет 23м, а на 3000 метров уже 71 метр. Если подбирать коэффициент К по другим высотам, то все равно на заданной высоте погрешность близка к нулю. Зато на других высотах погрешность неприемлемо высокая. Поэтому барометрическую формулу применять не стоит.
Для градуировки авиационных приборов применяется так называемая стандартная атмосфера. В ней зависимость давления воздуха от высоты приведена в виде таблицы, при этом изменение температуры воздуха учитывается в давлении. Все авиационные высотомеры проектируются и настраиваются таким образом, что бы их показания соответствовали стандартной атмосфере. Это позволяет измерять высоту, не корректируя показания по температуре воздуха. Имеется формула, описывающая стандартную атмосферу:
![]()
![]() (1.3)
(1.3)
Где: Н – высота в метрах относительно точки с давлением 760 мм. рт. ст.
Р – давление воздуха на высоте полета в мм. рт. ст.
Если использовать сигнал датчика абсолютного давления, то формулу (1.3) можно привести к такому виду:

 (1.4)
(1.4)
Где: Н – высота относительно точки с давлением 760 мм РТ. ст.
U – сигнал датчика абсолютного давления на высоте полета;
U0 – напряжение питания датчика;
U760 – сигнал датчика абсолютного давления при давлении 760 мм рт. ст. или 101324,72 Па, фактически это константа, как и весь делитель;
б – постоянное смещение датчика.
Формула (1.3) описывает стандартную атмосферу в диапазоне высот от -1000 до +11000 метров. При этом среднеквадратичное отклонение от табличной стандартной атмосферы составляет 0,31 м.
Формулы (1.3) и (1.4) содержат степенную функцию. Это не всегда удобно для расчетов на микропроцессоре, так как потребуется сложный алгоритм для расчета. Ход давления в таблице близок к логарифмической функции, поэтому для расчета высоты удобно применять тот же алгоритм, который используется для расчета логарифма, но с измененными коэффициентами. В связи с этим, мною разработан следующий алгоритм расчета:
Сначала рассчитывается величина:
 (1.5)
(1.5)
Где: P – абсолютное давление на высоте полета;
P0 – давление на нулевой высоте =760 мм рт ст, или 101324,72 Па;
U – сигнал датчика абсолютного давления на высоте полета;
U760 – сигнал датчика абсолютного давления при давлении 760 мм рт. ст. – фактически это константа;
U0 – напряжение питания датчика давления;
б - константа датчика давления.
В формуле (1.5) делитель это фактически константа, которая может быть рассчитана заранее, и потом использоваться для вычислений.
Далее рассчитывается величина:
![]()
![]() (1.6)
(1.6)
Далее из полученной величины рассчитывается абсолютная высота:
H=a1*X*(1+X*(a2+X*(a3+X*(a4+X*a5)))) (1.7)
Где: H – высота в метрах относительно точки с давлением 760 мм рт. ст.
a1=16860,0792
a2=-0,19975937
a3=0,44131606
a4=-0,37315752
a5=0,44008742
Для определения высоты относительно аэродрома, сначала рассчитывается абсолютная высота на поле аэродрома, и она запоминается в памяти. А в полете из абсолютной высоты полета вычитается абсолютная высота аэродрома. Если требуется вычислить высоту относительно аэродрома с известным атмосферным давлением, вычисляется сначала сигнал датчика абсолютного давления соответствующий этому давлению по формуле (1.1), а затем вычисляется абсолютная высота точки по формулам (1.5), (1.6), (1.7), и эта высота уже используется как высота аэродрома.
Этот алгоритм обеспечивает расчет высоты в диапазоне от -1000 метров до +11000 метров со среднеквадратичной погрешностью относительно стандартной атмосферы не более 0,5 м. Алгоритм содержит только простые арифметические действия: умножение и сложение и деление, что упрощает его использование в микропроцессорных устройствах.
2.Вариометр
Вариометр это прибор, показывающий вертикальную скорость летательного аппарата. Вертикальная скорость вычисляется путем определения разности высот за заданный промежуток времени, и делением разницы на величину этого временного промежутка. Математически это выглядит следующим образом:
![]()
![]() (2.1)
(2.1)
Где: ДH – изменение высоты
ДТ – время
Таким образом, для измерения вертикальной скорости всегда нужно какое-то время. Самый простой алгоритм сводится к измерению высоты с заданным временным промежутком, расчета разницы и деления этой разницы на время. Однако, если высота зашумлена, т. е. имеет случайные колебания относительно истинного значения, точность расчета ухудшается и может стать неприемлемой. Самый надежный алгоритм, разработанный мною, заключается в вычислении коэффициентов функции изменения высоты во времени методом наименьших квадратов. Для этого вычисляются высоты с заданным интервалом времени, заведомо меньшим, чем время измерения вертикальной скорости. Чем меньше интервал, тем больше исходных данных будет для расчетов и тем точнее расчет. Например, если взять интервал 0,2 секунды, то за время измерения 1 секунда наберется пять отсчетов. А за 5 секунд будет уже 25 отсчетов. Таким образом, набирается облако данных, из которого потом производится расчет. Функция изменения высоты будет равна:
![]()
![]() (2.2)
(2.2)
где: Н – высота
a0 , a1 - коэффициенты полинома
На самом деле, коэффициенты полинома это усредненные начальная высота a0 = H0 и вертикальная скорость a1 = V за последний интервал времени. Коэффициенты полинома вычисляются методом наименьших квадратов решением следующей системы уравнений:

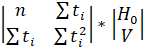 =
=![]()
![]() (2.3)
(2.3)
Где: n – число отсчетов
Ti - i - тый интервал времени, при интервале записи 0,2 с он будет равен 0; 0,2; 0,4; 0,6; 0,8; 1,0 и т. д.
H0 = a0 - начальная высота в функции аппроксимации (2.2)
V=a1 - вертикальная скорость в функции аппроксимации (2.2)
hi - i-тые отсчеты высоты
Решая эту систему, можно получить:
![]()
![]() (2.4)
(2.4)
![]()
![]() (2.5)
(2.5)
В формулах (2.4) и (2.5) знаменатель является константой при заданном числе отсчетов и интервале отсчета. Поэтому его можно вычислить заранее и потом применять как константу. При расчете вертикальной скорости нужна только формула (2.4).
Расчет вертикальной скорости по формуле (2.4) напоминает расчет скользящего среднего арифметического. Берется заданное число последних отсчетов. Рассчитывается сумма всех отсчетов, сумма произведений каждого отсчета на время этого отсчета с начала выборки, сумма всех отсчетов времени с начала выборки, которая то же, практически, является константой, и рассчитывается вертикальная скорость по формуле (2.4). Затем появляется новый отсчет, при этом вся группа отсчетов сдвигается, как в стеке, а самый первый отсчет из группы удаляется. И производится новый расчет по формуле (2.4). Таким образом, смена информации происходит со скоростью появления отсчетов, хотя информация все время выводится за последний заданный промежуток времени. Типичные промежутки времени могут быть выбраны 1, 2, 3, 4, 5, 6 секунд. Для самолетов, планеров, и мотодельтапланов, как правило, время отсчета вертикальной скорости должно быть не менее 3 секунд. Для парапланов парашютов и дельтапланов иногда бывает достаточно и одной секунды. Поэтому в вариометре должно быт предусмотрена возможность изменять время усреднения вертикальной скорости по потребностям пилота.
3. Горизонтальная скорость
Горизонтальная скорость вычисляется по разнице между динамическим и статическим давлением, снимаемым с трубки ПВД. При этом сам перепад давлений небольшой, что требует применения чувствительного дифференциального датчика давления. Например, для указателя скорости в диапазоне 0 – 100 км/час требуется дифференциальный датчик давления с диапазоном измерения 0 – 500 Па. Такой датчик приобрести достаточно проблематично. Для измерения горизонтальной скорости в диапазоне 0 – 360 км/час уже нужен датчик на 0 – 6,125 кПа. Приобретение такого датчика уже не является трудной задачей. Рассчитав по сигналу дифференциального датчика разницу динамического и статического давлений, можно рассчитать скорость:
![]()
![]() (3.1)
(3.1)
Где: V – горизонтальная скорость, м/с;
P – разница давлений, Па;
с – плотность воздуха, кг/м3, принимается равной 1,225 кг/м3 .
Авиационные приборы рассчитывают так называемую приборную скорость, при которой плотность воздуха принимается постоянной и равной плотности стандартной атмосферы на уровне моря с=1,225 кг/м3. Подставляя в формулу (3.1) это значение, получим:
![]()
![]() (3.2)
(3.2)
Где: V – скорость полета, м/с;
Р – разница динамического и статического давлений, Па.
Приборная скорость обеспечивает постоянство аэродинамических характеристик самолета независимо от высоты полета. Сохраняя постоянную воздушную скорость по показаниям указателя скорости, летчик обеспечивает постоянные режимы для несущего крыла самолета. Поэтому для пилотирования самолета важно знать воздушную скорость. Однако при этом возникает погрешность определения курсовой скорости, так как истинная скорость полета оказывается зависимой от высоты. Поэтому для более точного определения своего местоположения и прогноза времени долета до цели, а так же для расчета аэродинамического качества летательного аппарата, требуется знание истинной скорости, что требует еще и учета плотности воздуха, который может осуществляться путем учета абсолютного давления и температуры воздуха на высоте полета по формуле:
![]()
![]() =
= ![]()
![]() (3.3)
(3.3)
Где: Vi – истинная скорость;
Vpr – приборная скорость по формуле (3.1);
с0 – Стандартная плотность воздуха=1,225 кг/м3 ;
сi – истинная плотность воздуха на высоте полета;
T0 – стандартная температура =288,150K;
T – абсолютная температура воздуха на высоте полета;
P0 – стандартное давление 101324,72 Па (760 мм рт. ст.);
P – давление воздуха на высоте полета, Па. (или мм рт. ст.).
4. Аэродинамическое качество
Аэродинамическое качество рассчитывается как отношение горизонтальной скорости к вертикальной. При расчете аэродинамического качества необходимо учитывать, что измеряемая приборами горизонтальная скорость на самом деле является лишь скоростью, которая была бы при полете в стандартной атмосфере на уровне моря. В то время как вертикальная скорость измеряется независимо от уровня атмосферного давления. В связи с этим появляется кажущееся уменьшение аэродинамического качества с высотой. Ведь при увеличении высоты, при постоянных показаниях указателя скорости, фактическая горизонтальная скорость будет расти. И фактическая вертикальная скорость то же вырастет, но обычные приборы заметят только увеличение вертикальной скорости. Например, для планера Бланик, в стандартной атмосфере, на высоте 2000 метров при температуре на высоте 20 С и скорости 83 км/час, расчетное аэродинамическое качество будет 25,37 тогда как фактическое – 28! Поэтому, при расчете аэродинамического качества обязательно необходимо учитывать изменение давления и температуры воздуха на высоте полета. В соответствии с формулой (3.3), аэродинамическое качество следует рассчитывать по формуле:
![]()
![]() (4.1)
(4.1)
Где: Vpr – приборная горизонтальная скорость по формуле (3.1), м/с
Vv – вертикальная скорость по формуле (2.4), м/с
P0 – стандартное давление 101325 Па (760 мм рт. ст.);
P – давление воздуха на высоте полета, Па, (или мм рт. ст.).
T0 – стандартная температура =288,150K;
T – абсолютная температура воздуха на высоте полета;
5.Компенсированный вариометр.
Компенсированный вариометр нужен планеристам, при выпаривании в восходящих потоках. В восходящем потоке постоянно приходится маневрировать, что бы удержаться в центре потока. В результате, горизонтальная скорость планера часто меняется в ту или иную сторону. Пилоту часто приходится работать ручкой “на себя” или “от себя”. При этом происходит изменение горизонтальной скорости и высоты полета. Например – ручка от себя, горизонтальная скорость планера начинает расти, но и высота начинает падать. Ручка на себя – высота начинает расти, а горизонтальная скорость падать. А на изменение высоты обычный вариометр реагирует как на дополнительную вертикальную скорость, накладывающуюся на собственно вертикальную скорость планера в потоке. Из-за этого показания вариометра становятся плавающими, что затрудняет нахождение центра потока, и оценку силы восходящего потока. Для компенсации этого явления используется метод расчета изменения полной энергии планера, которая переводится в вертикальную скорость. При этом прибор перестает реагировать на кратковременные движения ручкой, а также на изменение горизонтальной скорости вызванной турбулентностью, а показывает вертикальную скорость только с учетом вертикальной скорости потока. Например, ручка от себя, высота падает, но растет горизонтальная скорость, а следовательно полная энергия планера не изменяется. Или ручка на себя, высота растет, но падает горизонтальная скорость, опять полная энергия не изменяется. Математически это выглядит следующим образом:
Полная энергия планера равна:
![]()
![]() (5.1)
(5.1)
Где: m – масса планера
g – ускорение свободного падения =9,80665 м/с2
h –высота, м;
V – горизонтальная скорость, м/с.
Разделив обе части формулы (5.1) на mg, получим:
![]()
![]() (5.2)
(5.2)
В формуле (4.2) слева стоит удельная весовая энергия планера.
Продифференцировав по времени формулу (5.2) получим:
![]()
![]() (5.3)
(5.3)
Или:
![]()
![]() (5.3.1)
(5.3.1)
Где: Vk – показания компенсированного вариометра, м/с;
Vvar – вертикальная скорость, рассчитанная по датчику давления, м/с;
V – горизонтальная скорость, м/с;
g - ускорение свободного падения (9,80665 м/с2);
dV/dt – скорость изменения горизонтальной скорости (горизонтальное ускорение) , м/с2 ;![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
