
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ВВЕДЕНИЕ
Дисциплина «Измерительные преобразователи» является частью профессионального цикла дисциплин подготовки студентов по направлению 5B070200 – «Автоматизация и управление». Дисциплина реализуется на базе кафедры «Приборостроение и автоматизация технологических процессов».
Содержание дисциплины охватывает круг вопросов, связанных с приобретением знаний, умений и навыков в проектировании измерительных преобразователей и датчиков, их внедрением и эксплуатацией в различных областях при измерении физических величин.
Дисциплина нацелена на формирование ряда профессиональных компетенций выпускника согласно ГОСО «Автоматизация и управление».
Преподавание дисциплины предусматривает следующие формы организации учебного процесса: лекции, практические занятия, самостоятельную работу студента,– индивидуальные задания.
1 КУРСОВОЕ ПРОЕКТИРОВАНИЕ
1.1 Цель курсовой работы
Целью освоения дисциплины является усвоение студентом теории и практики методов и использования средств измерения физических величин любой природы с использованием как традиционных, так и современных информационных технологий, а также формирование у обучающихся устойчивой мотивации к самообразованию путем организации их самостоятельной деятельности.
1.2 Задание на курсовую работу
Номер варианта задания выбирается по порядковому номеру в списке группы (определяет преподаватель). Варианты задания приведены в
таблице 1.
Темой курсовой работы является расчет термоэлектрического измерительного преобразователя.
В курсовой работе провести расчет измерительного преобразователя – термопары по ГОСТ 6616-94. На основании полученных данных сделать вывод о необходимости линеаризации характеристики и предложить вариант линеаризации, определить разрядность аналого-цифрового преобразователя (АЦП), выбрать и обосновать структуру АЦП, пояснить принцип работы АЦП, а также разработать функциональную схему измерительного преобразователя и составить технические описание ее работы.
Задание курсовой работы сформировать по следующим пунктам:
- номер варианта; тип измерительного преобразователя; вариант линеаризации; разрядность аналого-цифрового преобразователя; функциональная схема измерительного преобразователя; технические описание работы функциональной схемы.
В пояснительной записке рассмотреть следующие разделы:
введение;
1) построить график функции E = f(t),
где E – термо-электродвижущая сила (термоЭДС) термопары (мВ);
T – температура (°С);
2) построить прямую, соединяющую крайние точки заданного диапазона температуры, т. е. идеальную линейную характеристику преобразования по температуре;
3) определить максимальную в заданном диапазоне температуры погрешность нелинейности характеристики и сделать вывод о необходимости линеаризации, исходя из заданного класса точности с учетом запаса по погрешности не менее 20% от заданного (0,25);
4) определить разрешающую способность (разрядность) АЦП с учетом линеаризации, учитывая, что максимальная погрешность преобразователя (0,25) в соответствии с ГОСТ 8.009 «Метрологические характеристики средств измерения» не должна превышать ![]() 5 квантов (единиц младшего разряда);
5 квантов (единиц младшего разряда);
5) определить число участков линеаризации, обеспечивающих заданную точность преобразования, и предложить вариант линеаризации НСХ преобразователя по температуре любым способом (кусочно-линейная аппроксимация, прямое преобразование с помощью ПЗУ, другое);
6) выбрать и обосновать принцип работы узла АЦП;
7) определить время преобразования измерительного преобразователя, исходя из принципа работы узла АЦП, фильтрации помех и времени реакции датчика;
8) разработать структурную (функциональную) схему измерительного преобразователя, указав основные функциональные узлы с учетом особенностей измерения температуры датчиком-термопарой (ЭДС низкого уровня, компенсация температуры свободных концов). Составить описание устройства и принципа действия измерительного преобразователя по структурной (функциональной) схеме: функциональное назначение и необходимость в составе прибора каждого узла схемы.
Эти пункты являются основными разделами пояснительной записки и определяют названия разделов.
Пояснительную записку оформить в соответствии со стандартом СТП 164-08-98 «Общие требования к оформлению текстового и графического материала»
Пояснительная записка должна содержать:
- содержание;
- введение;
- основные разделы;
- выводы;
- список литературы.
Схемы графической части выполнить на листах формата А3 и подшить к пояснительной записке. В графической части приводятся структурные схемы, графики, рисунки и, по необходимости, другие материалы.
Входной сигнал для датчика термо-ЭДС (ГОСТ 6616-94)
Выходной сигнал - цифровой – пропорциональный температуре двоичный код.
Гальваническое разделение между входными и выходными цепями.
2 ВАРИАНТЫ ЗАДАНИЙ
Варианты заданий приведены в таблице 1.
Таблица 1
№ варианта | Термопара | Диапазон температуры, °С | Класс допуска | Время реакции датчика на изменение температуры |
1 | ТХК(L) | от 0 до 150 | 1 | более 10 сек |
2 | ТХА(К) | от 0 до 500 | 2 | более 15 сек |
3 | ТПР(В) | от 300 до 1100 | 2 | более 15 сек |
4 | ТПП(S) | от 0 до 500 | 1 | более 5 сек |
5 | ТПП(R) | от 0 до 1000 | 2 | более 5 сек |
6 | ТХК(L) | от 0 до 400 | 1 | более 10 сек |
7 | ТХА(К) | от -40 до 600 | 2 | более 15 сек |
8 | ТПР(В) | от 300 до 1100 | 3 | более 5 сек |
9 | ТПП(S) | от 0 до 500 | 1 | более 5 сек |
10 | ТПП(R) | от 0 до 1000 | 2 | более 5 сек |
3 УКАЗАНИЯ К ВЫПОЛНЕНИЮ РАБОТЫ
3.1 Построение графика функции E = f(t).
График функции E = f(t) где Е – термо-электродвижущая сила (термо - э. д. с.) термопары (мВ). Для построения НСХ термопары ТХК(L) используем данные ГОСТ 3044-84 (таблица 1). Построим график НСХ термопары ТХК(L) для диапазона температур от 0 до +100єС с шагом 5єС.
Таблица 1 - ГОСТ 3044-84 для термопары ТХК(L)
Температура рабочего конца єС | Т. э. д. с., мВ для температуры, єС | Т. э. д. с., мВ для температуры, єС идеальной прямой | Погрешность нелинейности |
0 | 0 | 0 | 0 |
5 | 0,318 | 0,343 | 0,025 |
10 | 0,639 | 0,686 | 0,047 |
15 | 0,963 | 1,029 | 0,066 |
20 | 1,289 | 1,372 | 0,083 |
25 | 1,619 | 1,715 | 0,096 |
30 | 1,951 | 2,058 | 0,107 |
35 | 2,286 | 2,401 | 0,115 |
40 | 2,623 | 2,744 | 0,121 |
45 | 2,963 | 3,087 | 0,124 |
50 | 3,306 | 3,43 | 0,124 |
55 | 3,651 | 3,773 | 0,122 |
60 | 3,998 | 4,116 | 0,118 |
65 | 4,348 | 4,459 | 0,111 |
70 | 4,700 | 4,802 | 0,102 |
75 | 5,055 | 5,145 | 0,09 |
80 | 5,411 | 5,488 | 0,077 |
85 | 5,770 | 5,831 | 0,061 |
90 | 6,131 | 6,174 | 0,043 |
95 | 6,495 | 6,517 | 0,022 |
100 | 6,860 | 6,86 | 0 |
3.2 Построение идеальной линейной характеристики преобразования по температуре.
Прямая, соединяющая две крайние точки рабочего диапазона датчика 0 и 100єС, является идеальной линейной характеристикой преобразования (значения Т. э. д. с. для нее можно увидеть в таблице 1). Уравнение для нашей прямой выглядит следующим образом:
 ;
; ![]()
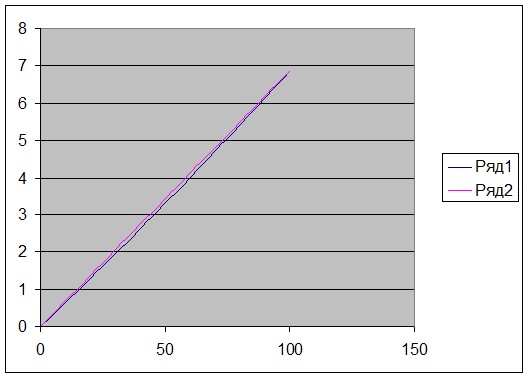
Рисунок 1- График зависимости сопротивления от температуры
3.3 Определение максимальной в заданном диапазоне температуры погрешности нелинейности характеристики
Нелинейность преобразователя – это отклонение от прямой линии, проведенной через крайние точки характеристики преобразования для заданного диапазона работы.
Из таблицы 1 и графика видно, что максимальное отклонение номинальной статической характеристики от прямой в диапазоне температур от 0 до 100єС будет при 50єС.
Относительная погрешность – это разность между номинальным и действительным отношениями аналоговой величины, соответствующей заданному цифровому входному сигналу, к полной шкале, независимо от калибровки последней.
Максимальную относительную погрешность нелинейности (в %) в диапазоне температур от 0 до 100єС, определим по формуле (1):
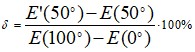 (1)
(1)
где ![]() – значение идеальной линейной характеристики преобразования для температуры 50єС;
– значение идеальной линейной характеристики преобразования для температуры 50єС;
![]() – значение термоЭДС НСХ термопары ТХК(L) для температуры (50єС);
– значение термоЭДС НСХ термопары ТХК(L) для температуры (50єС);
![]() – диапазон значений термоЭДС НСХ термопары ТХК(L) для крайних точек характеристики преобразования (e (0єС) и e (100єС)).
– диапазон значений термоЭДС НСХ термопары ТХК(L) для крайних точек характеристики преобразования (e (0єС) и e (100єС)).
Итак, максимальная относительная погрешность нелинейности (в %) составит:
![]()
Наш измерительный преобразователь должен обеспечивать класс точности 0,25 с запасом не менее 20%, т. е. точность преобразования должна быть лучше 0,2 (20% от 0,25 это 0,05).
Для соответствия нашего преобразователя точности 0,2 необходимо провести линеаризацию преобразователя температуры датчика ТХК(L).
3.4 Определение разрешающей способности АЦП
Разрешающая способность преобразователя есть наименьший уровень входного аналогового сигнала (для АЦП), для которого вырабатывается выходной цифровой код, и наименьший входной цифровой код (для ЦАП), для которого образуется уровень выходного аналогового сигнала. На практике полезная разрешающая способность преобразователя часто оказывается меньше указанной, поскольку она ограничивается из-за воздействия шума, температуры и факторов времени.
Полезная разрешающая способность – это наименьший возможный различимый разряд для всех требуемых условий эксплуатации (времени, температуры и т. д.).
Определим разрешающую способность (разрядность) АЦП с учетом линеаризации и то, что максимальная погрешность АЦ-преобразователя в соответствии с ГОСТ 8.009 «Метрологические характеристики средств измерения» не должна превышать ![]() 5 квантов (единиц младшего разряда).
5 квантов (единиц младшего разряда).
Разрешающая способность определяется количеством двоичных разрядов входного аналогового сигнала и характеризуется возможным количеством уровней выходного кода.
Можем определить требуемую разрешающую способность преобразователя (полезную) по формуле:

Где L – ширина диапазона изменения напряжения, равная ![]() ,
,
![]() - шаг квантования определяется исходя из заданной точности (шума квантования):
- шаг квантования определяется исходя из заданной точности (шума квантования):
![]()
где ![]() - шум квантования, %.
- шум квантования, %.
Шум квантования рассчитывается следующим образом:
При L=![]() имеем шаг квантования:
имеем шаг квантования:
![]()
Количество уровней квантования будет
![]()
Далее необходимо определить минимальное количество разрядов АЦП, которое может обеспечить рассчитанное число уровней квантования. Количество разрядов определяется, как ближайшее целое число по условию:
![]()
Таким образом, получаем 11 – разрядный выходной код АЦП. С учетом 1 разряда на линеаризацию получим ![]() , и 12 – разрядный преобразователь удовлетворяют условию 20% запаса, учитывая, что максимальная погрешность АЦП не должна превышать 5 квантов. Следовательно, выбираем
, и 12 – разрядный преобразователь удовлетворяют условию 20% запаса, учитывая, что максимальная погрешность АЦП не должна превышать 5 квантов. Следовательно, выбираем ![]() .
.
3.5 Линеаризация НСХ преобразования
Для достижения требуемой точности преобразования используют линеаризацию НСХ термопреобразователя. На практике широкое распространение получил метод линеаризации с помощью кусочно-линейной аппроксимации. В этом методе исходную функцию представляют ломанной кривой, уменьшая тем самым число точек характеристики, значение которых необходимо держать в памяти вычислительного устройства, соответственно при этом уменьшаются требования к вычислительному устройству, что удешевляет стоимость всей системы и упрощает ее.
Мы также будем использовать метод кусочно-линейной аппроксимации. Для этого разделим исходную НСХ термопреобразователя на несколько участков, в каждом из которых НСХ представляется прямым отрезком, соединяющим крайние точки характеристики НСХ.
В первом приближении число необходимых участков линеаризации можно определить по формуле:
![]()
где
![]() – число участков линеаризации;
– число участков линеаризации;
![]() – максимальная погрешность линеаризации (%);
– максимальная погрешность линеаризации (%);
0,2 – требуемая точность преобразования.
Итак,
![]()
Таким образом, в первом приближении, для соответствия преобразователя классу точности 0,25, исходную НСХ термопреобразователя необходимо разделить на 12 участков.
3.6 Выбор и обоснование принципа работы узла аналого-цифрового преобразования
Выбор и обоснование принципа работы узла аналого-цифрового преобразования
По существу аналого-цифровые преобразователи либо преобразуют аналоговый входной сигнал (напряжение или ток) в частоту или последовательность импульсов, длительность которой измеряют для обеспечения отображающего цифрового сигнала, либо, чтобы получить цифровой выходной сигнал, сравнивают входной сигнал с переменным опорным сигналом, используя внутренний ЦАП.
Существует три ведущих способа преобразования, основанных на принципе измерения временного интервала: преобразование напряжения в частоту, метод с пилообразным напряжением и метод линейного интегрирования. На методе сравнения основываются схемы последовательного приближения, параллельные и модифицированные параллельные схемы.
В основном находят применение 2 основных типа АЦП: двухтактный интегрирующий АЦП и АЦП последовательного приближения. Каждый из них преобразовывает входное напряжение в цифровой код, пропорциональный входному напряжению.
При выборе принципа работы узла аналого-цифрового преобразования будем учитывать следующие факторы:
- точность преобразования;
- скорость преобразования;
- стабильность точностных характеристик преобразователя во времени;
- стоимость преобразователя;
- гальваническое разделение входных и выходных цепей.
Рассмотрим все эти факторы:
1) из задания известно, что время реакции датчика на изменение температуры составляет более 10 секунд – можем применить низкоскоростной АЦП;
2) требования к точности преобразования - 12 разрядный АЦП (п.3);
3) стоимость преобразователя – как можно дешевле;
4) стабильность точностных характеристик преобразователя во времени – с течением времени преобразователь должен обеспечивать высокое качество преобразования без необходимости частой калибровки потребителем;
5) практически все АЦП позволяют реализовать гальваническое разделение между входными и выходными цепями, различия будут лишь в технической реализации и стоимости выбранного решения.
Этим требованиям отвечают интегрирующие АЦП, которые имеют дополнительные преимущества по сравнению с АЦП последовательного приближения: минимальное число необходимых точных компонентов, высокую помехоустойчивость, отсутствие дифференциальной нелинейности, низкую стоимость.
Итак, выбираем двухтактный интегрирующий АЦП. Рассмотрим принцип работы двухтактного интегрирующего АЦП.
В первом такте цикла преобразования производится интегрирование – накопление интеграла от некоторого входного сигнала, а затем во втором также выполняется операция «разинтегрирования» - считывание накопленного интеграла путем подачи на вход интегратора другого входного сигнала (опорного). Диаграмма изменения напряжения Uи на выходе неинвертирующего интегратора при реализации принципа двухтактного интегрирования показана на рисунок 2. В первом такте длительностью Т1 напряжение Uи изменяется от некоторого начального уровня (в частном случае от нуля) до значения Uм. Во втором такте длительностью Т2 происходит обратное изменение Uи – от Uм до исходного уровня. Накопление интеграла (в течение Т1) происходит при подаче на вход интегратора напряжения Uвх. и = U1, а считывание (Т2) – при подаче напряжения Uвх. и = U2.
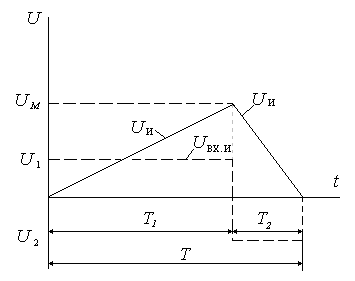
Рисунок 2 - Диаграмма изменения интеграла при реализации принципа двухтактного интегрирования
Суммарное приращение интеграла за цикл интегрирования равно нулю, поэтому можно записать
![]()
где ф – постоянная времени интегратора.
Отсюда видно, что напряжения U1 и U2 должны иметь различную полярность, а соотношение длительностей тактов определяется равенством
T2/T1 = - U1/U2.
Задача построения точного цифрового измерителя длительности импульсов решается просто: производят подсчет импульсов известной частоты, заполняющих измеряемый промежуток времени. В интегрирующем преобразователе этого типа не важны стабильность частоты генератора импульсов, если исходить из того, что она остается постоянной за время преобразования, и стабильность «постоянной времени» интегратора. Выбирая время интегрирования равным одному или нескольким периодам сигнала помехи, помеху можно исключить. Двухтактный интегрирующий АЦП применяется до 14-разрядной точности и обеспечивает высокое подавление помех и превосходную стабильность, как во времени, так и по температуре.
3.6 Время преобразования измерительного преобразователя
Типичное время преобразования равно удвоенному произведению периода импульсов на число уровней квантования.. Это время значительно больше, чем для преобразователя последовательного приближения, имеющего такую же частоту генератора импульсов. С другой стороны, для любой заданной точности интегрирующий преобразователь обычно стоит меньше, чем преобразователь последовательного приближения, так как он почти не требует прецизионных элементов. АЦП двойного интегрирования применим до 14 – разрядной точности и обеспечивает высокое подавление помех и превосходную стабильность, как во времени, так и по температуре, но он относительно медленно действующий.
3.7 Структурная схема измерительного преобразователя
Выходное напряжение термопары пропорционально разности температур между двумя спаями (чувствительным и опорным). На практике требуется знание температуры на чувствительном спае. Учесть температуру опорной термопары можно двумя способами:
1) поддерживать на опорном спае постоянную температуру, равную 0°С, обычно для этой цели используют ванночку с тающим льдом или стабилизированный по температуре холодильник, который будет выполнять ту же работу ;
2) построение компенсирующих схем, которые корректируют отличие, связанное с тем, что температура на опорном соединении не равна 0°С.
Основная идея компенсирующих схем заключается в использовании полупроводникового датчика, воспринимающего температуру холодного спая, и схемы, формирующей поправку к напряжению, т. е. компенсирующей разницу между фактической температурой опорного спая и стандартной (0°С).
Кроме того, т. к. термопары имеют низкое выходное напряжение (50мкВ/°С или около этого), и применяются в областях, где существуют большие синфазные помехи промышленной частоты и радиочастотные наводки, то усилитель (или измерительная схема) должен хорошо подавлять синфазные помехи промышленной частоты (50Гц) и иметь стабильное дифференциальное усиление.
Кроме того, входное сопротивление усилителя должно быть достаточно высоким, чтобы предотвратить ошибки от нагружения датчика, поскольку выводы термопар имеют некоторое сопротивление.
Исходя из этих положений, одним из вариантов структурной схемы измерительного преобразователя может стать преобразователь, приведенный на рисунок 3.

Рисунок 3- Структурная схема измерительного преобразователя
Рассмотрим назначение каждого узла структурной схемы измерительного преобразователя.
Измерительный преобразователь (рисунок 3) содержит фильтр низких частот (ФНЧ), устройство компенсации ЭДС опорного спая, измерительный усилитель сигнала датчика (термопары), интегратор, логический узел управления (устройство управления), генератор тактовых импульсов, компаратор, выходной счетчик и узел гальванического разделения между входными и выходными цепями (гальваническая изоляция).
ФНЧ (фильтр низких частот) необходим для устранения высокочастотных составляющих помех из полезного сигнала датчика термопары и пропуска на измерительный усилитель только медленно изменяющихся сигналов.
Схема компенсации ЭДС опорного спая содержит в своем составе полупроводниковый датчик, воспринимающий температуру опорного спая и схему, формирующую поправку к напряжению датчика, т. е. компенсирующую разницу между фактической температурой опорного спая и стандартной (0°С).
Затем скомпенсированный сигнал подается на вход измерительного усилителя, который усиливает малые значения сигнала с термопары до величин, которые будут корректно обрабатываться интегрирующим АЦП.
Интегрирующий АЦП состоит из нескольких узлов: интегратора, компаратора, генератора тактовых импульсов, устройства управления и счетчика.
Интегратор, который интегрирует входной сигнал в течение определенного времени, затем, когда счетчик переполняется, аналоговый входной сигнал отсоединяется устройством управления от интегратора и интегрируется опорное напряжение. Т. к. опорное напряжение постоянно, то наклон в течение времени T2 всегда будет постоянным. Интервал времени T2, необходимый для возвращения выходного напряжения интегратора в нуль, является функцией входного напряжения Uвх. Цифровой счетчик, который установился в конце интервала T1 в исходное состояние, снова начинает считать в течение интервала T2. Когда выходное напряжение интегратора достигает нуля, счетчик останавливается и его состояние представляет цифровое слово, отображающее входной аналоговый сигнал.
Блок гальванической изоляции необходим для гальванического разделения между входными и выходными цепями измерительного преобразователя, что позволяет подключать к выходу преобразователя практически любые устройства, исключая выход их из строя (из-за возникновения уравнивающих токов при появлении разности потенциалов между сопрягаемыми устройствами вследствие различных факторов).
СПИСОК ЛИТЕРАТУРЫ
1. Алексеев , стандартизация и сертификация. –М.: Издательский центр «Академия», 2007.
2. , Ястребов , стандартизация и технические измерения. М.: Высшая школа, 2002.
3. арманный справочник инженера-метролога. М.: Додека-ХХ1, 2002.
4. Евтихиев электрических и неэлектрических величин. –М.: Энергоатомиздат, 1990.
5. , Алферев приборы. 1 том. –М.: Издательство стандартов, 1986.
6. Клаасен теории измерений. Электронные методы и приборы в измерительной технике. – М.: Постмаркет, 2000.
7. и др. Технологические измерения и приборы. –М.: Высшая школа, 1989.
