

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования и науки РФ
НГТУ
Настройка концевых выключателей исполнительного механизма на примере МЭО производство МЗТА.
Методические указания и лабораторные работы
Составители: д. т.н., проф., , к. т.н., доц., , асс. , асс
Рецензент: к. т.н., доц., ,
Новосибирск 2011
Цель работы
- Закрепить теоретические знания по подключению КИП; Закрепить теоретические знания принципа работы МЭО; Освоить принцип сборки электрической схемы на учебном стенде; Освоить принципы настройки концевых и путевых выключателей.
Допуск
Необходимо знать назначение МЭО, концевых и путевых выключателей. Понимать электрическую схему стенда.
Состав оборудования
Компьютер с предустановленной программой STEP 7. Стенд «SIEMENS» в составе оборудования: МЭО, кнопки и световые индикаторы, контроллер «SIEMENS S7-300», коммутационные провода.
Теоретические основы
Концевые и путевые выключатели входят в состав блока сигнализации положения (БСП), который в свою очередь входит в состав МЭО.
БСП предназначен для преобразования величины изменения положения выходного органа МЭО в пропорциональный электрический сигнал и сигнализации или блокирования в крайних или промежуточных положениях выходного органа.
По принципу действия БСП делятся на следующие типы:
- токовые (БСПТ); реостатные (БСПР); индукционные (БСПИ).
В лабораторной работе используется БСПР поэтому рассмотрим его более подробно.
Технические характеристики
Выходной сигнал от 0-100 Ω в зависимости от положения вала.
Нелинейность выходного сигнала до +1% от максимального значения выходного вала.
Дифференциальный ход микровыключателей до 30 угла поворота вала блока.
Микровыключатели допускают коммутацию:
от 5 mA до 1А при постоянном напряжении 24 и 48 V.
от 20 mA до 500 mА при переменном напряжении 220V частоты 50 Hz.
Устройство и работа микровыключателей
Каждый микровыключатель имеет размыкающийся и замыкающийся контакты с раздельными выводами для ограничения положений и сигнализации перемещения вала, который соединяется с выходным валом исполнительного механизма.
Устройство и работа датчика положения
Датчик положения предназначен для преобразования углового перемещения выходного вала механизма в пропорциональный электрический сигнал в виде плавно меняющегося электрического сопротивления.
Электрическая схема блока сигнализации положения приведена ниже (Рис. 1.1)
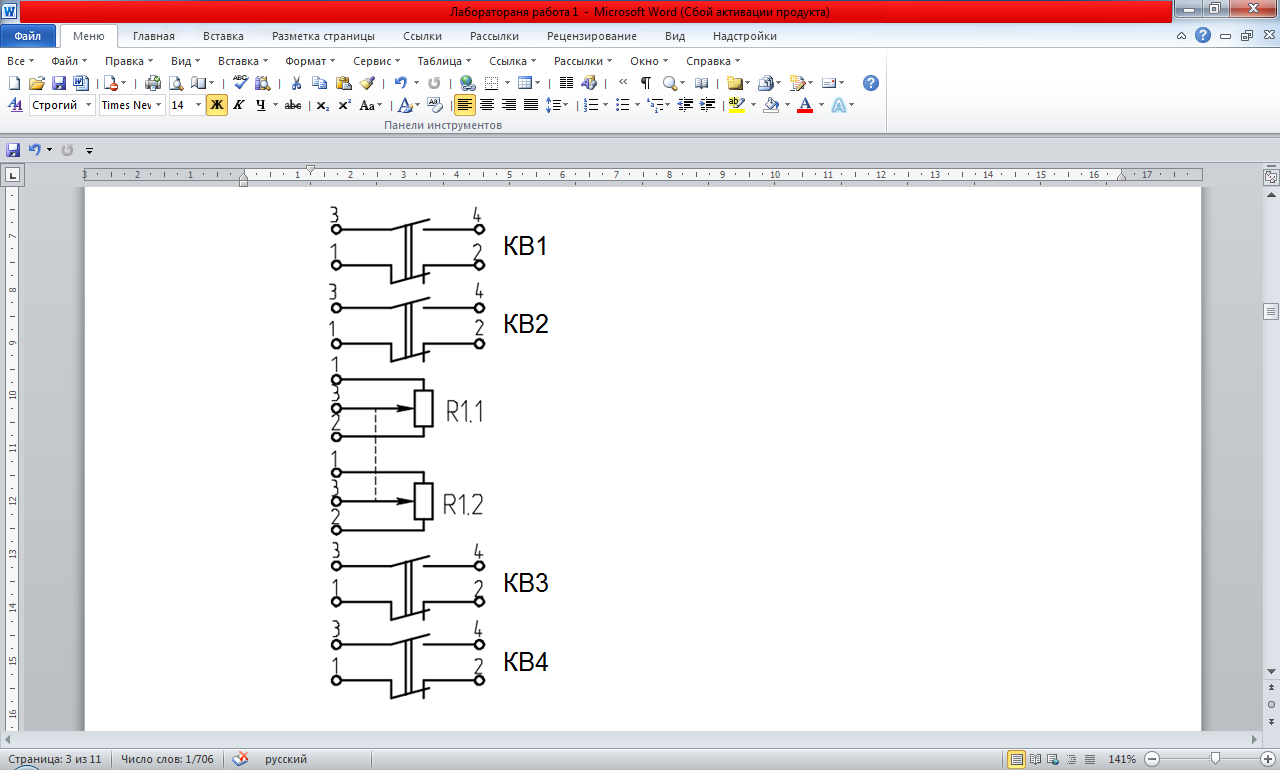
Рис. 1.1 Электрическая схема БСПР
Методика выполнения работы
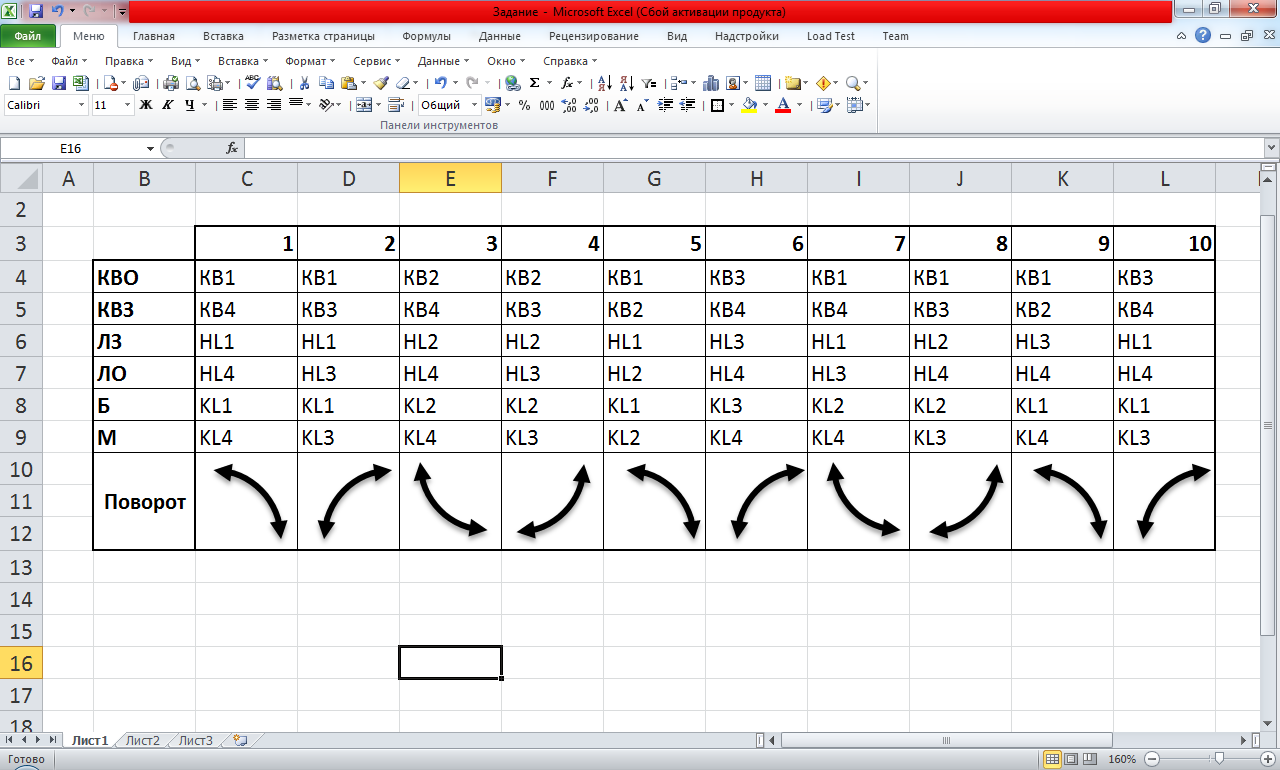
Согласно заданному варианту необходимо составить электрическую схему подключения оборудования и настроить блок концевых выключателей для сигнализации заданного положения вала через световые индикаторы (HL1, HL2, HL3, HL4).
Указания к выполнению работы
1. Перед началом работы, преподавателю необходимо проверить подключение контролера и компьютера с предустановленной программой STEP7.
2. Убедиться, что в контроллере загружена программа, которая напрямую соединяет дискретные входы с дискретными выходами.
Если соответствующей программы нет, ее необходимо создать, порядок действий приведен ниже.
1. Для написания программы необходимо сконфигурировать контроллер (Рис. 1.2);
2. Создать таблицу символов (Рис. 1.3);
3. На основе созданной таблицы символов написать программу (Рис. 1.4).
Рекомендуется сохранить созданный проект на компьютере под названием «laba1», что бы каждый раз не набирать программу, а просто запускать созданный проект и загружать программу в контроллер перед началом лабораторной работы.

Рис. 1.2 Конфигурация контроллера
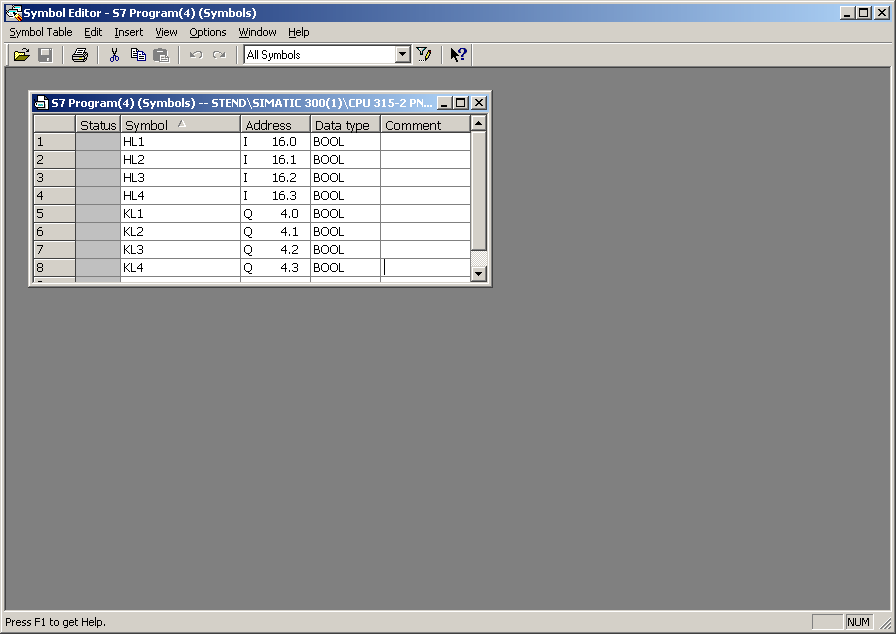
Рис. 1.3 Таблица символов
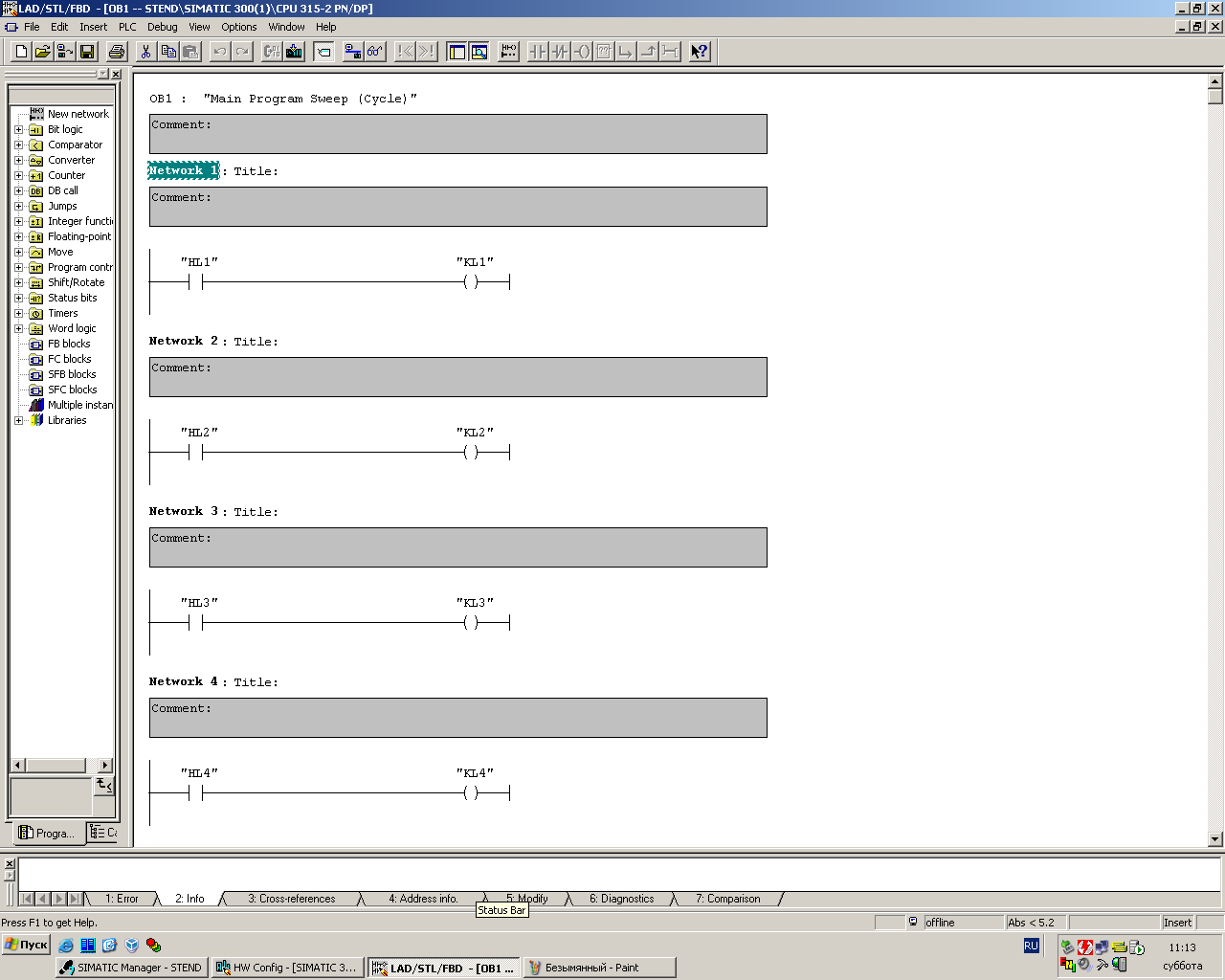
Рис. 1.4 Листинг программы
Рассмотрим пример выполнения варианта №10.
Этап 1. Коммутация аппаратуры
1. Составляем схему подключения оборудования стенда согласно варианту (Рис. 1.5).
2. У преподавателя необходимо получить допуск на сборку составленной схемы подключения на стенде;
3. Преподаватель должен выдать коммутационные провода;
4. Перед сборкой схемы убедиться, что стенд выключен (лампочка между кнопками пуск и стоп не горит);
5. Произвести сборку схемы;
6. Включить стенд;
7. Убедиться, что при нажатии кнопок «Б» и «М» механизм приводиться в движение, если механизм не работает проверить сборку схемы и наличие программы в контроллере.
Этап 2. Настройка концевых выключателей.
1. Установить выходной орган механизма в положение «Закрыто».
2. Ослабить гайку для перемещения кулачков БСП.
3. Кулачок КВ4 (для данного варианта) переместить в положение при котором загорается световой индикатор HL1 (согласно варианту)
4. Затянуть гайку.
5. Установить выходной орган механизма в положение «Открыто».
6. Ослабить гайку для перемещения кулачков.
7. Кулачок КВ3 (для данного варианта) переместить в положение, при котором загорается световой индикатор HL4 (согласно варианту).
8. Затянуть гайку.
9. Продемонстрировать преподавателю выполненную работу.
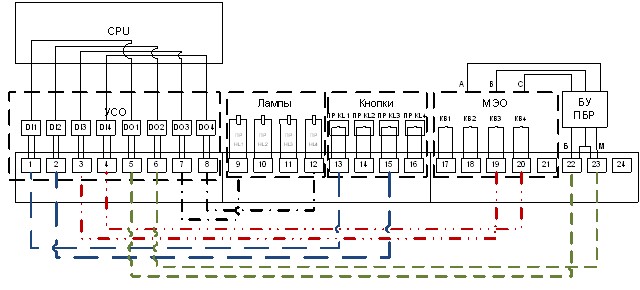
Рис. 1.5 Пример составления схемы подключения оборудования
Варианты задания
Содержание отчета
Титульный лист
Название работы
Цель
Задачи
Объект исследования
Схема установки
Схема подключения
Выводы
Контрольные вопросы
1. Назовите причины выхода из строя блока концевых выключателей
2. Опишите принцип действия БСПР
3. Укажите элементы на стенде работающие при постоянном напряжении 24V
4. Укажите элементы на стенде работающие при переменном напряжении 220V
5. Опишите принцип действия реле с самоподхватом.
6. Возможно ли управлять МЭО непосредственно с контроллера?
7. Возможно ли управлять МЭО без контроллера?
Литература
1. Руководство по эксплуатации БСПР;
2. Руководство по эксплуатации МЭО;
3. Технические средства автоматизации : учебник для студ. высш. учеб. заведений / , . — М. : Издательский центр «Академия», 2007. — 368 с. ISBN 978-5-7695-3624-3.
