
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Модель «Жало скорпиона»
Автор: Скорик Роман – 14 лет,
ГБОУ ДОД ЦДЮТТ Кировского района Санкт-Петербурга
Номинация: Свободная творческая категория
Актуальность
В современном мире всё чаще мы можем наблюдать высотные постройки. При строительстве подобных построек не обойтись без подъемных кранов и различных транспортеров. Модель «Жало скорпиона» представляет собой механизм, выполненный из образовательного конструктора. На данной модели можно изучать некоторые принципы и особенности работы строительной техники и манипуляторов.
Новизна
Строительными машинами, как правило, управляют непосредственно люди, находящиеся в кабинах этих машин. В модели «Жало скорпиона» управление осуществляется удалённо по каналу Bluetooth, что позволяет человеку находиться на некотором расстоянии от проводимых работ и наблюдать за процессом с удобного места.
Назначение
Модель «Жало скорпиона» предназначена для погрузки, перемещения и выгрузки различных предметов.
Описание конструкции
Робот представляет собой модель стрелы подъемного крана, удаленное управление роботом осуществляется с помощью Android-устройства. Основание модели выполнено в виде неподвижной пластины, на которой установлен поворотный механизм. Повороты относительно центральной оси могут производиться в любую сторону неограниченное число раз. Конструкция стрелы модели позволяет опускать или поднимать расположенный на её конце манипулятор. Манипулятор представляет собой механизм, позволяющий захватывать небольшие предметы.
Схема модели «Жало скорпиона»
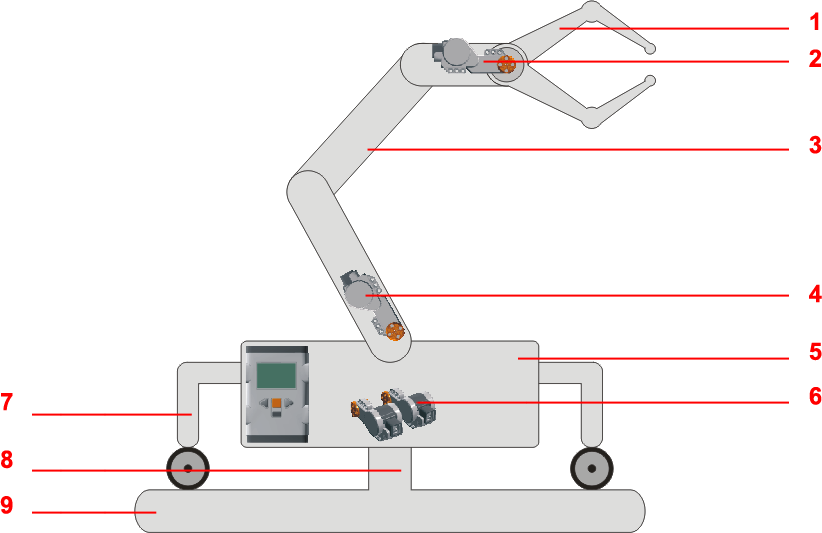
Рисунок 1. Схема модели «Жало скорпиона»
1 – клешни манипулятора
2 – мотор, управляющий клешнями манипулятора
3 – стрела
4 – мотор, управляющий наклоном стрелы
5 – корпус робота
6 – моторы поворотного механизма
7 – волокуши (подвижные опоры конструкции)
8 – ось вращения
9 – неподвижная опора
Принцип работы
Как было сказано ранее, моделью можно управлять удаленно с помощью Android-устройства. В конструкции применён контроллер NXT, и задействованы три порта для моторов.
Вся конструкция, может повернуться в любую сторону за счет двух запараллеленных моторов. После того, как модель была ориентированна нужным образом, нужно задействовать третий мотор, позволяющий опускать или поднимать стрелу над захватываемым предметом. Последний мотор отвечает за работу клешней манипулятора. Попеременно подавая сигналы нужным образом на порты контроллера можно перемещать предметы с помощью данной модели.
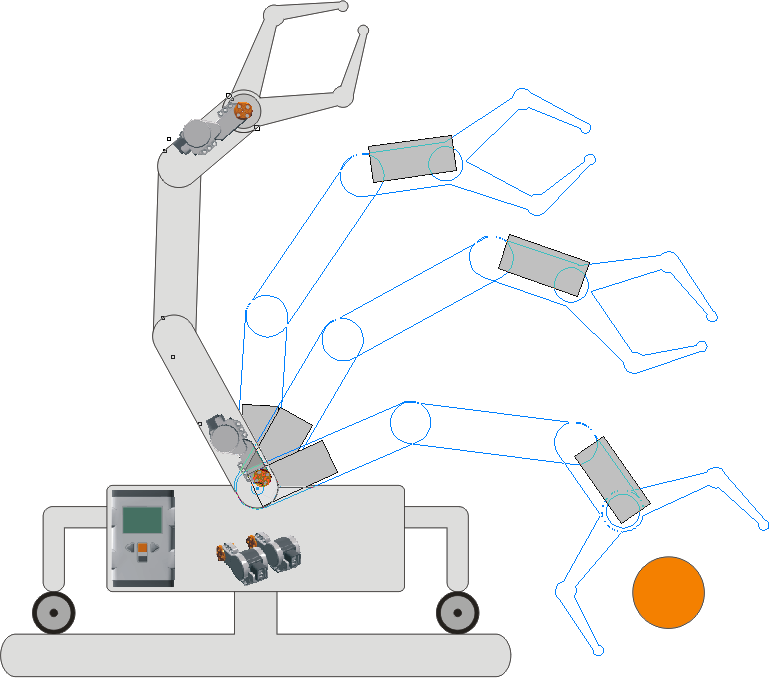
Рисунок 2. Принцип работы модели «Жало скорпиона»
