
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
7.6.Исполнительные устройства УЧПУ
Исполнительные устройства СПУ реализуют согласованное движение рабочих органов, заданное управляющей программой, а также различные переключения исполнительных механизмов. Системы управления исполнительными механизмами делятся, в зависимости от характера и способа задания реализуемого движения, на цикловые, позиционные и контурные.
Цикловые системы управления обеспечивают лишь включение и выключение исполнительных механизмов в зависимости от номера реализуемого такта в составе технологического цикла и от номера рабочей точки, по достижении которой совершаются заданные переключения. Приход в заданную точку фиксируется электромеханическими упорами (путевыми переключателями), информация от которых поступает в управляющее устройство и определяет дальнейшее распределение управляющих сигналов в рамках текущего такта управления. При чисто цикловом управлении положение рабочих органов фиксируется лишь в отдельных точках траектории их движения, различаемых по номерам этих точек. При необходимости фиксируется также и время пребывания исполнительных механизмов в заданном положении. Траектории перемещения рабочих органов от одной фиксированной точки к другой при цикловом управлении жестко определяются конструкцией исполнительных устройств и не могут быть изменены произвольно.
Позиционные системы управления обеспечивают помимо всего того, что реализуют цикловые системы управления, также и вывод рабочих органов в произвольную точку пространства в зоне обслуживания и фиксирование (позиционирование) рабочих органов в заданной точке с заданной точностью. При позиционировании траектория перемещения рабочих органов в пределах зоны обслуживания может быть задана произвольно, а точность отработки перемещения задается лишь в окрестности точки позиционирования.
Контурные системы управления, помимо реализации описанных выше функций обеспечивают перемещение рабочих органов по заданному контуру с заданной точностью отработки контура. Для этого контур намечается в виде совокупности опорных точек, а перемещение рабочих органов реализуется от точки к точке путем линейной или круговой интерполяции (см. §7.4). Для исполнительных устройств УЧПУ характерна реализация как позиционного, так и контурного управления.
В качестве силовой части исполнительных устройств УЧПУ применяются электрические, гидравлические и пневматические приводы, следящие или шаговые, причем применение электроприводов непрерывно расширяется. Это происходит благодаря улучшению их массогабаритных показателей, лучшим эксплуатационным характеристикам и КПД и созданию электромеханизмов, способных с высокой эффективностью воспроизводить заданные пространственные траектории. Наибольшее распространение среди исполнительных устройств УЧПУ получили следящие электроприводы (СЭП) постоянного и переменного тока.
В электродвигателях постоянного тока, использующих беспазовые малоинерционные двигатели и имеющих повышенные требования к качеству воспроизведения движения, широко применяются транзисторные широтно-импульсные преобразователи. Применение следящих приводов этого типа характерно для роботов-манипуляторов и станков малой мощности. Функциональная схема такого привода приведена на рис. 7.8.

Рис.7.8. Следящий электропривод постоянного тока для роботов
Здесь транзисторные модули V1- V4, питаемые от нерегулируемого выпрямителя В с емкостным фильтром С, составляют силовую часть широтно-импульсного преобразователя, питающего двигатель постоянного тока М. Коммутация вентилей V1- V4 определяется частотой и скважностью импульсов, поступающих с широтно - импульсного регулятора ШИР. Скважность импульсов на выходах ШИР определяется уровнем напряжения на его входе и задает скважность напряжения, поступающего на двигатель М. Чем больше скважность, тем меньше средняя величина напряжения, питающего якорь двигателя М.
Система управления приводом включает в себя цифровой контур регулирования положения (причем регулятор положения запрограммирован в микропроцессорном модуле МПМ) и аналоговые контуры регулирования скорости и тока с датчиком тока ДТ и с тахогенератором ТГ в качестве датчика скорости. Таким образом, мы имеем трехконтурную следящую систему с подчиненным регулированием скорости и тока якоря. В качестве регуляторов скорости и тока применены аналоговые пропорционально-интегральные регуляторы РС и РТ. Могут быть применены и цифровые регуляторы, причем их алгоритмы строятся по схеме, представленной на рис. 5.22. В случае применения цифровых регуляторов сигналы скорости и тока должны быть преобразованы в числовую форму с помощью АЦП.
В качестве датчика положения ДП в схеме рис.7.8. использован фотоэлектрический датчик, работающий в коде Грея, причем в датчик ДП встроен преобразователь кода Грея в двоичный арифметический код микропроцессорного модуля МПМ. В модуле МПМ число Nц, определяющее положение датчика ДП, сравнивается с числом Nцз, определяющим заданное положение. Величина рассогласования обрабатывается в соответствии с программой регулятора положения и в результате определяется в числовом виде величина уставки скорости Nщз. Далее данная уставка должна поступить на вход комплектного регулируемого привода, имеющего, как показано на рис. 7.8, аналоговую систему управления. Поэтому она преобразуется цифро-аналоговым преобразователем ПКН (преобразователь код-напряжение) в аналоговую форму.
Следящие электроприводы постоянного тока имеют высокие показатели: диапазон регулирования скорости до 104 при относительной неравномерности движения не хуже 0,2, полосу пропускания замкнутого контура >20Гц, высокую идентичность приводов по различным управляемым осям. Они выпускаются комплектно в аналоговом и цифровом исполнениях. Однако в настоящее время они успешно вытесняются следящими электроприводами переменного тока, двигатели которых имеют лучшие массогабаритные и стоимостные показатели.

Рис.7.9. Следящий электропривод переменного тока на базе вентильного двигателя
На рис. 7.9 приведена функциональная схема СЭП переменного тока, построенного на базе вентильного двигателя, с управлением от микроконтроллера МК. Вентильные двигатели широко используются в приводах подач станков с ЧПУ и в приводах звеньев промышленных роботов. Вентильный двигатель, представленный на схеме рис. 7.9, построен на базе трехфазной синхронной машины М переменного тока с возбуждением от постоянных магнитов на роторе и на базе вентильного коммутатора, построенного на транзисторных модулях V1- V6 c подключенными антипараллельно обратными диодами VD1-VD6. Двигатель М совместно с коммутатором эквивалентен машине постоянного тока. Он получает питание от неуправляемого выпрямителя В с емкостным фильтром С на выходе. Вентильный коммутатор переключается коммутатором фаз КФ в зависимости положения ротора М сигналами датчика положения ротора ДПР. Порядок переключения вентилей V1- V6 устанавливается таким, чтобы двигатель М мог развивать максимальный для текущего положения его ротора момент. Релейный регулятор РРТ обеспечивает регулирование тока статора путем сравнения уставки заданного значения тока, поступающей от переключателя характеристик ПХ, с сигналом обратной связи по току, поступающим от датчиков фазных токов ДТ. Устройство сравнения УС и переключатель характеристик ПХ обеспечивают соответствие знаков уставки тока и фактического значения сигнала обратной связи по току. Поскольку момент вентильного двигателя пропорционален амплитуде первой гармоники тока статора, то сигнал, задающий ток статора, тем самым задает и момент двигателя.
В СЭП по схеме рис. 7.9 сигнал обратной связи по положению формируется импульсным датчиком перемещения ДП, каждый импульс которого соответствует одной дискрете перемещения датчика. Величина перемещения Nц фиксируется в числовом виде на выходе АЦП. На другом выходе АЦП формируется также в числовом виде величина скорости Nщ, полученная путем дифференцирования сигналов датчика ДП. Сигнал положения Nц поступает на вход цифрового регулятора положения ЦРП, а сигнал скорости Nщ – на вход цифрового регулятора скорости ЦРС. Их алгоритмы составляются по схеме, представленной на рис.5.22. На выходах указанных регуляторов формируются в числовом виде уставка скорости Nщз и уставка тока Niз. Поскольку уставка тока должна поступать на переключатель ПХ в аналоговом виде, то на выходе ЦРС установлен цифро-аналоговый преобразователь ПКН.
Исполнительные устройства на базе электроприводов с шаговыми двигателями реализуются в двух вариантах: с приводом от силового шагового двигателя (ШД) и с приводом от гидромотора (ГМ), управляемого от ШД и являющегося, по существу, усилителем момента (см. рис. 7.10).
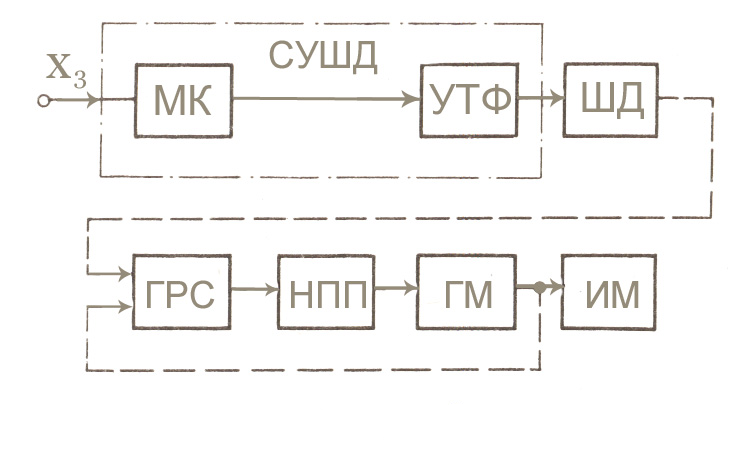
Рис.7.10. Шаговый электропривод с гидроусилителем момента
Система управления шаговым двигателем (СУШД) состоит из двух функциональных узлов: микроконтроллера МК и совокупности усилителей-регуляторов токов фаз УТФ. Микроконтроллер выполняет функции интерполятора и коммутатора фаз. Как интерполятор, он преобразует число Xз, поступившее от УЧПУ и задающее количество импульсов, поступающих на обмотки статора ШД, в реальные импульсы соответствующей частоты, причем количество импульсов равно заданному числу Xз, а их частота определяется заданной скоростью вращения. Как коммутатор фаз, МК распределяет импульсы по фазам ШД. Перед подачей на ШД импульсы усиливаются усилителями УТФ. Каждому импульсу соответствует одна дискрета (минимальная величина) поворота вала ШД. Если применен силовой ШД, то он непосредственно вращает исполнительный механизм ИМ. В противном случае ШД поворачивает ведущий элемент гидрораспределителя ГРС, что приводит к изменению давления в полостях насоса переменной производительности НПП и гидромотора ГМ. Выходной вал ГМ поворачивает ИМ и одновременно – ведомый элемент ГРС. Это приводит к тому, что после поворота вала ГМ на заданный угол ГРС оказывается в нейтральном положении и вал ГМ останавливается.
