


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лабораторная работа № 6
Метод динамического программирования для непрерывных систем.
Автономная система. Моделирование работы в среде Simulink
6.1. Цель работы: Научиться строить в математическом пакете MatLab систему, реализующую оптимальный регулятор, полученный при помощи метода динамического программирования Беллмана для непрерывной системы второго порядка.
6.2. Исходные данные (по вариантам, всего 25 комбинаций вариантов заданий)
Варианты начальных значений ![]() :
:
Варианты начальных значений ![]() :
:
6.3. Теоретическая часть
Рассматривается объект управления, движение которого задается уравнениями
![]()
В качестве конечной точки ![]() выберем начало координат, т. е. положим
выберем начало координат, т. е. положим ![]() Качество процесса управления будем оценивать функционалом
Качество процесса управления будем оценивать функционалом
 (1)
(1)
Таким образом, речь идет об определении оптимальной стратегии ![]() которая обеспечивает перевод фазовой точки из произвольного начального состояния в начало координат, и притом так, чтобы на траекториях движения функционал (9) принимал наименьшее значение.
которая обеспечивает перевод фазовой точки из произвольного начального состояния в начало координат, и притом так, чтобы на траекториях движения функционал (9) принимал наименьшее значение.
Выпишем функциональное уравнение Беллмана
 (2)
(2)
Так как на управляющий параметр u не наложено никаких ограничений, то для определения минимума необходимо продифференцировать правую часть уравнения (2) по u:
![]() (3)
(3)
Из (11) находим
![]() (4)
(4)
и уравнение Беллмана принимает вид
 (5)
(5)
Будем искать решение уравнения (13) в виде квадратичной формы
![]()
Тогда
![]()
Уравнение (13) принимает вид
![]()
Коэффициенты ![]() определяются из системы уравнений:
определяются из системы уравнений:
 (6)
(6)
Система нелинейных алгебраических уравнений (14) имеет два вещественных решения
Эти решения в соответствии с (12) приводят к двум синтезирующим функциям
![]() (7)
(7)
![]() (8)
(8)
В результате получаем две линейные системы, причем линейная система, порождаемая функцией (7), оказывается неустойчивой и, следовательно, не может обеспечить перевод фазовой точки в начало координат.
Таким образом, оптимальная синтезирующая функция (оптимальная стратегия) задается равенством (8). На рис. 1 изображена структурная схема оптимальной системы.
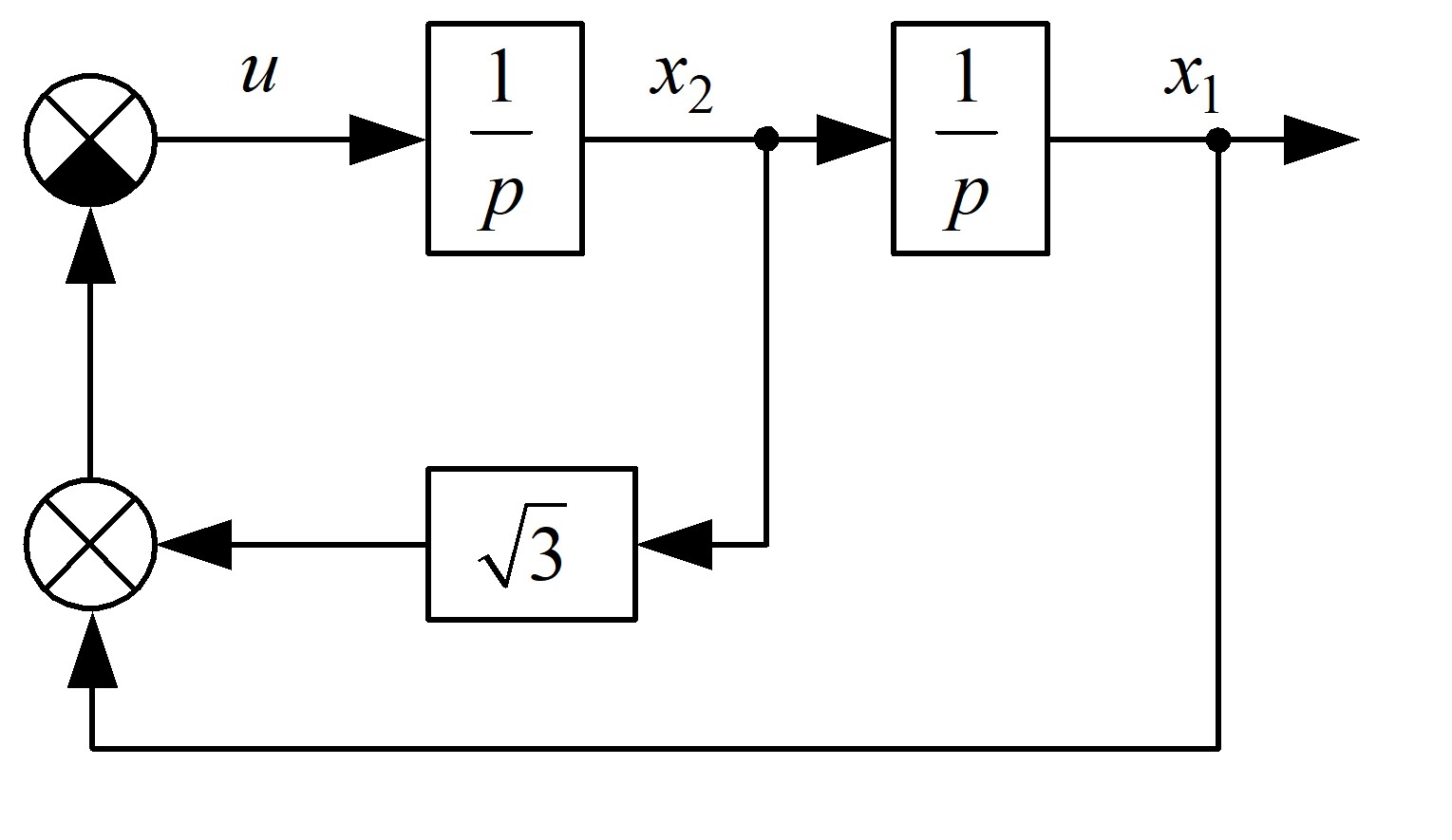
Рис. 1. Структурная схема оптимальной системы
6.4. Порядок выполнения работы
Получить задание по вариантам, определяющие значения начального состояния объекта управления:simulink
Дождаться загрузки среды.
Открыть в меню File -> New Model новую модель, в которой собрать схему, представленную на рис. 2. На рис. 2 блоки черного цвета моделируют систему на рис. 1, блоки красного цвета необходимы для расчета значения критерия эффективности, см. (1), а блоки синего цвета необходимы для вывода полученных графиков функций. Для этого необходимо использовать следующие блоки, находящиеся в разделах библиотеки среды Simulink:- Библиотека Commonly Used Blocks (Наиболее часто используемые блоки):
- Gain (коэффициент усиления); Integrator (интегратор); Mux (шина); Sum (сумматор);
- Add (суммирование); Math Function (математическая функция);
- Display (дисплей); Scope (осциллограф); XYGraph (фазовый портрет);
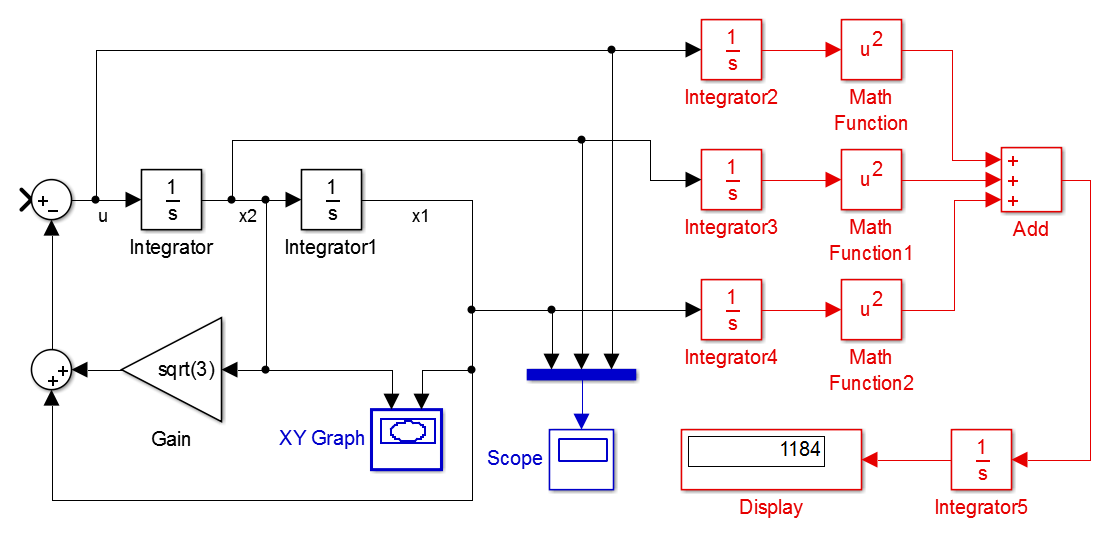
Рис. 2. Схема системы управления в среде Simulink
Для разворота/отображения блоков в модели можно использовать команды контекстного меню Rotate & Flip, вызвав его правым щелчком мыши на блоке. В одном из сумматоров Sum в соответствии со схемой на рис. 2. необходимо установить отрицательную связь. Для этого двойным щелчком открыть сумматор и заменить строку по умолчанию |++ на |+-. Для увеличения количества входов на шине Mux, двойным щелчком открыть меню и изменить количество входов по умолчанию с 2 на 3. В блоке Gain изменить значение коэффициента по умолчанию 1 на выражение sqrt(3), т. е. на
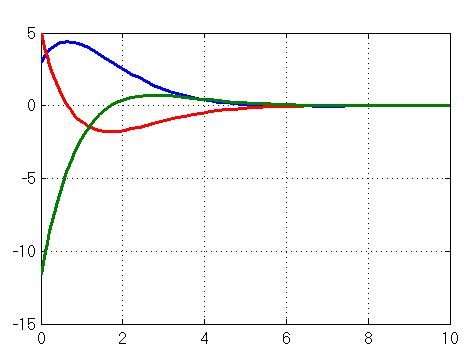
Рис. 3. Оптимальные траектории и закон управления (зелёным цветом)
Скопировать фазовый портрет в отчет. Пример показан на рис. 4.
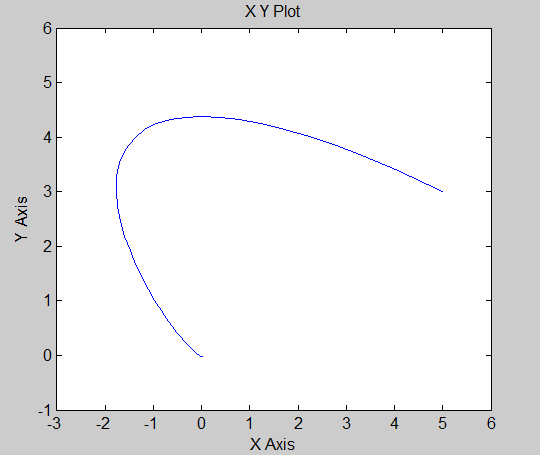
Рис. 4. Фазовый портрет
В блоке Display получить оптимальное значение критерия эффективности, скопировать его в отчет. Обратите внимание на то, что значение критерия будет зависеть от времени моделирования. Чем оно больше, тем значения критерия выше. Сделать выводы о проделанной работе.6.5. Контрольные вопросы
Что собой представляет функциональное уравнение Беллмана? Чем отличается задача оптимального программного управления от задачи синтеза оптимальной стратегии (закона) управления? Что произойдет с оптимальной траекторией движения системы при наличии возмущающих воздействий? Сформулируйте принцип оптимальности Беллмана для непрерывных систем. Почему время решения задачи в методе динамического программирования не фиксируется? В каком случае задача на основе метода динамического программирования считается решенной?6.6. Содержание отчета
Отчет о работе должен содержать следующее:
Титульный лист. Схема системы оптимального управления. Графики оптимальных траекторий движения системы. График оптимального управления. График фазового портрета. Оптимальное значение критерия эффективности.