


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Моделирование САР температуры воды
Самостоятельная работа
По курсу «Оптимальные системы автоматического управления»
ВЫПОЛНИЛ:
Студент:
Группа:
ПРОВЕРИЛ:
2014 г.
Оглавление
Задание 3
Характеристика объекта регулирования 3
Характеристика системы автоматического регулирования 3
Моделирование объекта регулирования 4
Определение параметров настроек ПИ регулятора методом Зиглера-Николса 7
Оценка качества процесса регулирования 11
Выводы 13
Список использованных источников 14
Задание
Вода, используемая в технологическом процессе, находится в сборнике для питьевой воды, откуда происходит ее дозирование на подготовку уксусного раствора и горчицы. Вода направляется на водоподогреватель ЕПВ. К водоподогревателю подается пар, давление пара не более 1,5 кгс / см2 . После выхода на заданную температуру (850С), вода направляется в вакуумный смеситель ВС.
Характеристика объекта регулирования
Объектом регулирования является температура воды, которая используется для подготовки уксусного раствора и горчицы (рис. 1). Управляющим воздействием является расход пара, подводимого для обогрева воды в водоподогревателе ЕПВ. При увеличении расхода пара, температура пара увеличивается, и наоборот. Заданное значение температуры воды - 85![]()
![]() .
.
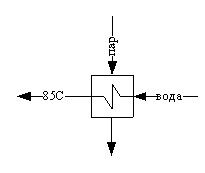
Рис. 1. Принципиальная схема пароводяного теплообменника
Характеристика системы автоматического регулирования
Система автоматического регулирования температуры является одноконтурной системой с обратной связью по отклонению регулируемого параметра. На вход регулятора подается отклонение регулируемой величины (рассогласование), которое формирует элемент САР – сумматор. Отклонение температуры воды равно разности между измеренным значением температуры и заданным (85![]()
![]() ). Если отклонение температуры равно нулю (т. е. измеренное значение равно заданному), то система регулирования не воздействует на процесс. Если отклонение температуры не равно нулю, то регулятор формирует управляющее воздействие на исполнительный механизм. Исполнительный механизм в свою очередь воздействует на регулирующий орган – клапан (увеличивает или уменьшает степень открытия клапана), а клапан изменяет расход пара, подводимого в теплообменник. Регулятор формирует управляющее воздействие так, чтобы в итоге отклонение температуры от заданного стремилось к нулю.
). Если отклонение температуры равно нулю (т. е. измеренное значение равно заданному), то система регулирования не воздействует на процесс. Если отклонение температуры не равно нулю, то регулятор формирует управляющее воздействие на исполнительный механизм. Исполнительный механизм в свою очередь воздействует на регулирующий орган – клапан (увеличивает или уменьшает степень открытия клапана), а клапан изменяет расход пара, подводимого в теплообменник. Регулятор формирует управляющее воздействие так, чтобы в итоге отклонение температуры от заданного стремилось к нулю.
Система автоматического регулирования температуры может быть представлена структурной схемой, изображенной на следующем рисунке (рис. 2.).

Рис. 2. Структурная схема САР температуры
Моделирование объекта регулирования
Объект регулирования представляет собой два последовательно соединенных звена – исполнительный механизм и клапан. Поэтому передаточная функция объекта – есть произведение их передаточных функций:
![]() ,
,
где к - коэффициент усиления клапана,
![]() - постоянная времени исполнительного механизма,
- постоянная времени исполнительного механизма,
![]() - постоянная времени клапана.
- постоянная времени клапана.
Таким образом, объект регулирования является объектом без самовыравнивания.
Так как получение передаточной функции путем решения дифференциальных уравнений достаточно трудоемко, то для этого используют экспериментально полученные кривые разгона.
Аппроксимируем кривую разгона методом Шварца (рис. 3.). Передаточная функция ищется в общем виде [i]:
![]() .
.
Для этого проведем касательную к кривой разгона и графически определим параметры ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
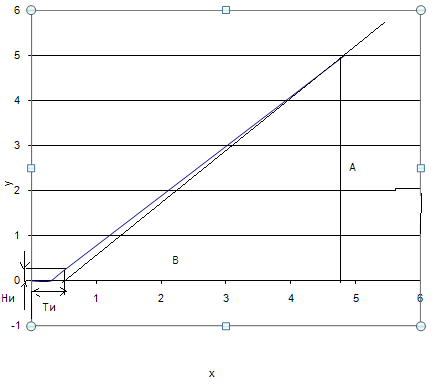
Рис. 3. Изображение результатов эксперимента
Параметры объекта регулирования, снятые с кривой разгона:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Коэффициент усиления напора воды
![]()
![]()
![]()
По номограмме (рис. 4б) по соотношению ![]() определяем коэффициент
определяем коэффициент ![]() =1.
=1.
По номограмме (рис. 4а) по коэффициенту ![]() определим
определим ![]() .
.
Отсюда:
![]()
По номограмме (рис. 4г) по отношению ![]() найдем коэффициент b=0.
найдем коэффициент b=0.
Таким образом, передаточная функция объекта регулирования:
![]()
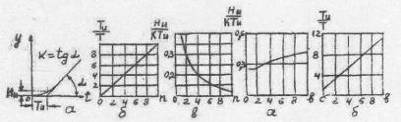
а) б) в) г)
Рис. 4. Номограммы к аппроксимации методом Шварца
Датчик температуры является апериодическим звеном и имеет передаточную функцию в виде:
![]() ,
,
![]() – коэффициент усиления датчика температуры
– коэффициент усиления датчика температуры ![]() ;
;
![]() – постоянная времени датчика температуры
– постоянная времени датчика температуры ![]() .
.
Таким образом передаточная функция датчика:
![]() .
.
Для получения переходной характеристики объекта реализуем структурную схему моделирования в программе 20-sim 4.1 (рис. 5) [ii]. В ней последовательно соединяется объект регулирования и датчик.
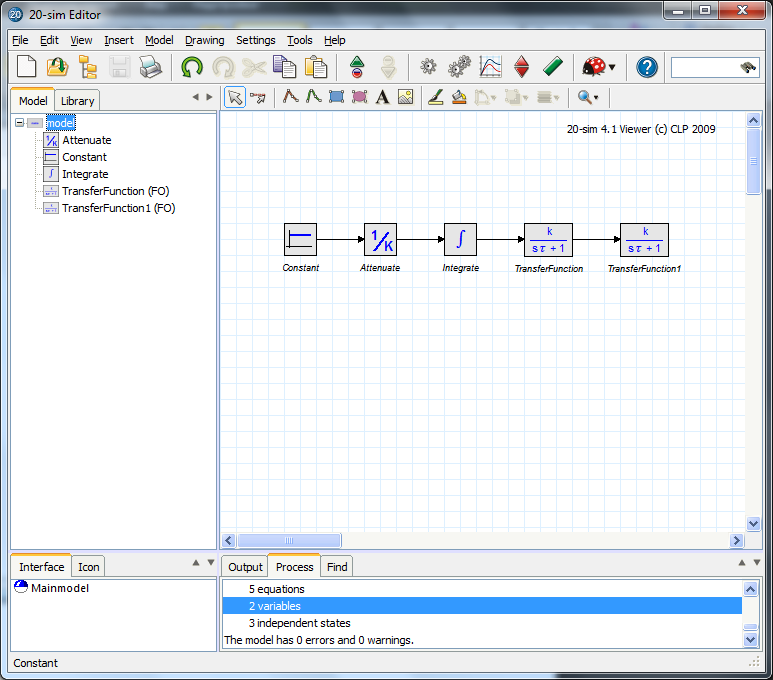
Рис.5. Структурная схема модели объекта
Задаем коэффициенты модели объекта регулирования во вкладке Model – Parameters/Initial Value Editor (рис. 6)
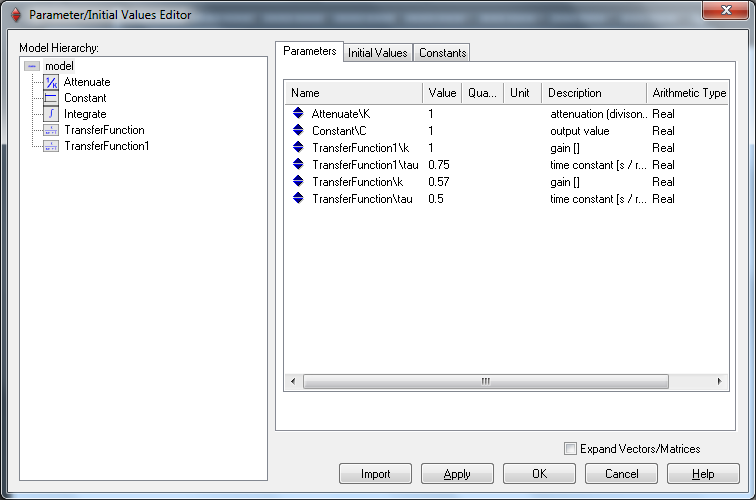
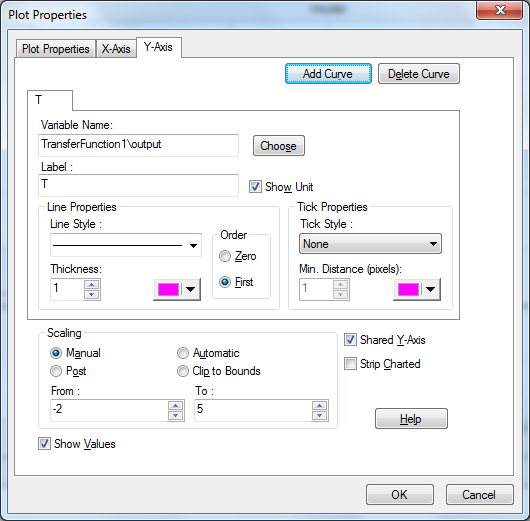
Рис. 6. Параметры эксперимента
В результате получаем переходную характеристику модели объекта (рис. 7).
Определение параметров настроек ПИ регулятора методом Зиглера-Николса
Зиглер и Николс предложили свой метод настройки П, ПИ и ПИД - регуляторов. Он основан на параметрах, определяемых по отклику объекта регулирования на единичный скачок; либо на частотных характеристиках объекта управления.
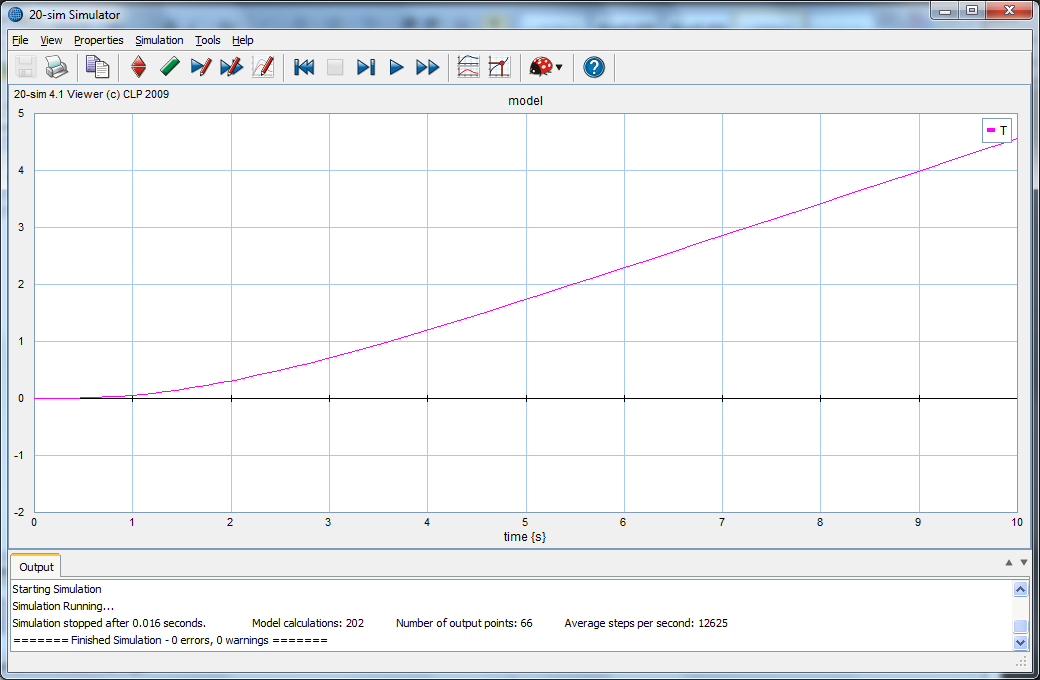
Рис. 7. Переходная характеристика модели объекта
Для расчета параметров ПИ-регулятора воспользуемся методом, основанном на параметрах, определяемых по отклику объекта регулирования на единичное ступенчатой воздействие. Для этого необходимо знать всего два параметра: ![]() и
и ![]() , определяемые по переходной характеристике, полученной в ходе моделирования объекта. (рис. 7). Графически (рис. 7) определяем коэффициенты:
, определяемые по переходной характеристике, полученной в ходе моделирования объекта. (рис. 7). Графически (рис. 7) определяем коэффициенты:
![]() ,
, ![]() .
.
Формулы для расчета параметров настроек ПИ-регулятора приведены в табл. 2.1.
Таблица 1.
Формулы для расчета коэффициентов регулятора по методу Зиглера-Николса
Расчет по отклику на скачок | Расчет по частотным параметрам | |||||
Регуляторы |
|
|
|
|
|
|
П |
| - | - |
| - | - |
ПИ |
|
| - |
|
| - |
ПИД |
|
|
|
|
| 0,125 |
Параметры настройки ПИ-регулятора по методу Зиглера-Николса:
![]() =
=![]()
![]() =
=![]()
![]() =
=![]()
![]() =
=![]() =6.
=6.
Построим структурную схему моделирования системы регулирования с ПИ-законом регулирования (рис 8).
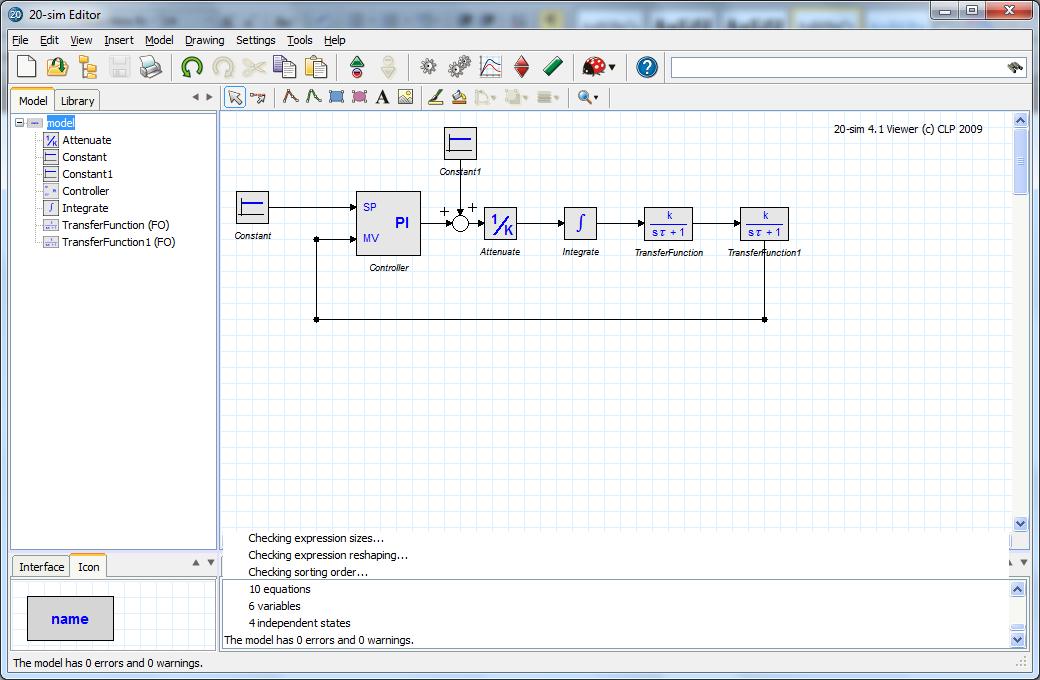
Рис. 8. Структурная схема САР с ПИ-законом регулирования
Вызовем окно проведения эксперимента, нажав Simulation. Зададим коэффициенты модели объекта. Начальные условия, параметры решения и список графиков, выводимых на экран (рис. 9).
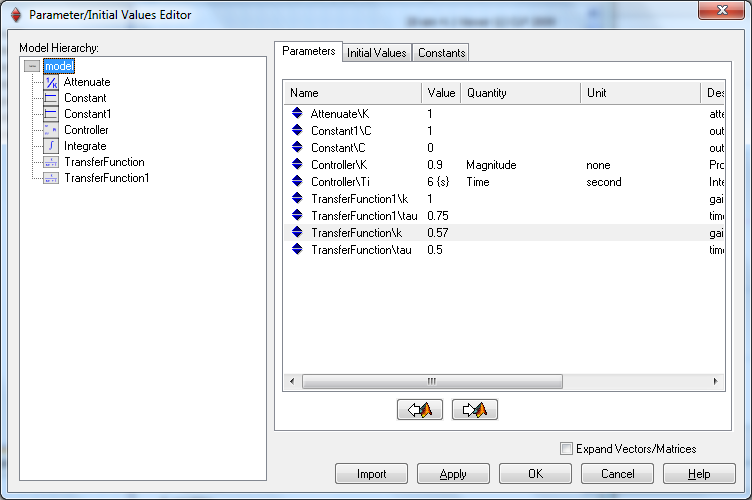
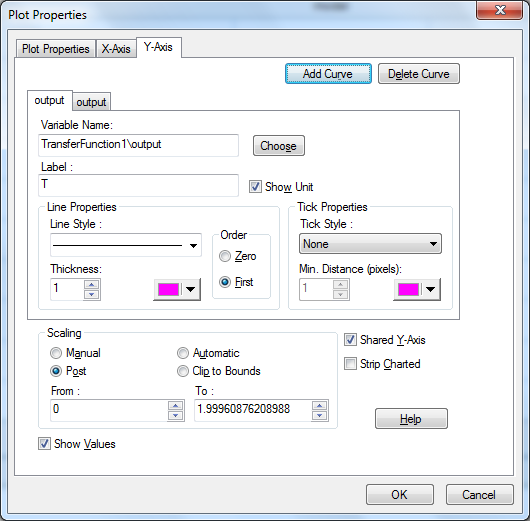
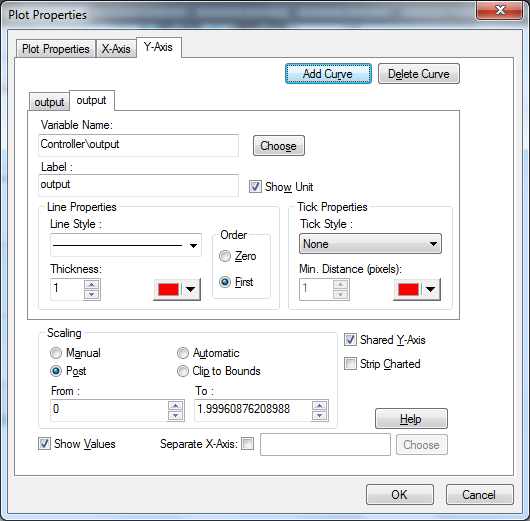
Рис. 9. Параметры эксперимента
В результате переходный процесс в замкнутой системе при единичном ступенчатом воздействии, полученный в результате моделирования САР, представлен на рис. 10.
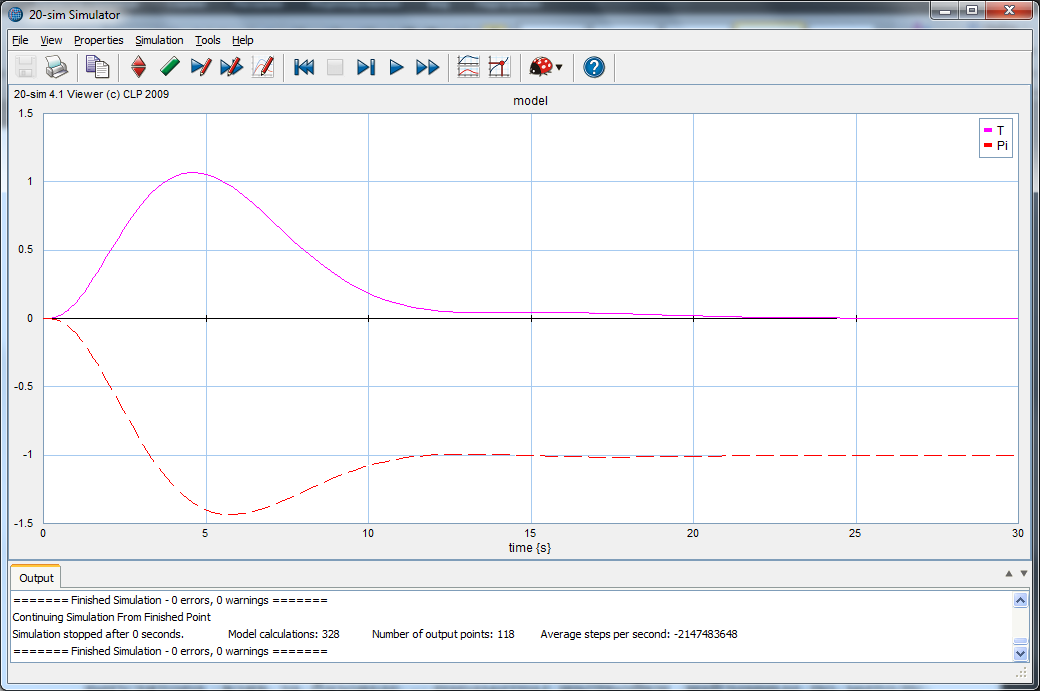
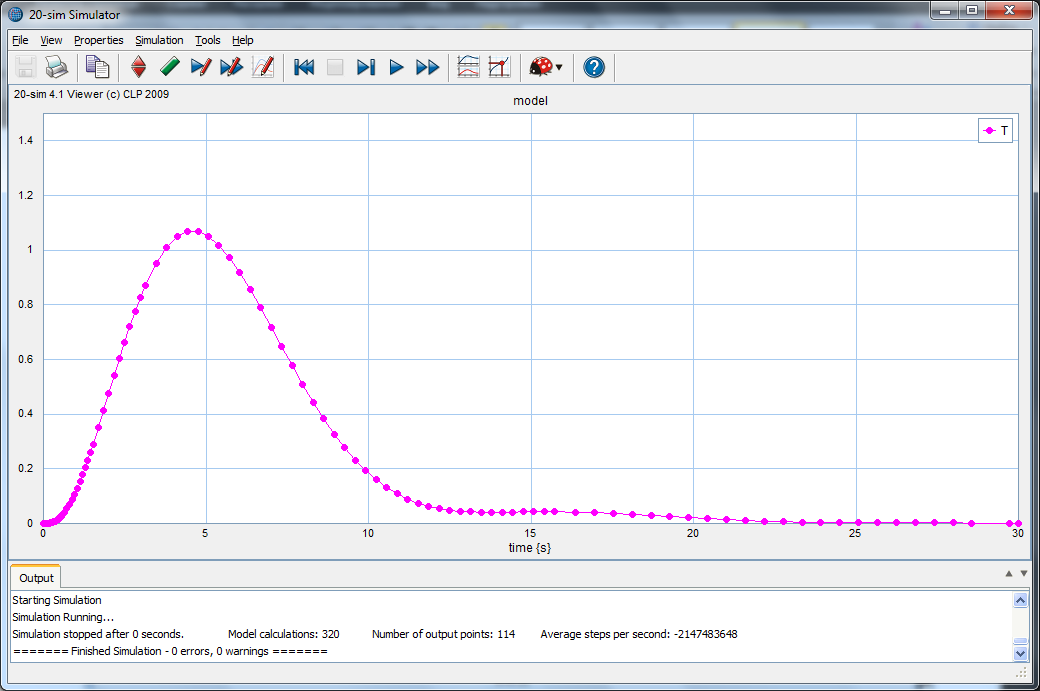
Рис. 10 Переходный процесс в САР, настроенной по методу Зиглера-Николса до оптимизации (снизу – увеличенный вариант)
Метод Зиглера-Николса дает параметры качества переходного процесса, далекие от оптимальных. Это объясняется упрощенностью метода (объект описывается только двумя параметрами), и тем, что в этом методе изначально гарантируется небольшой декремент затухания, равному 4, что дает медленное затухание процесса колебаний.
Форма полученного переходного процесса отличается от стандартной. Это происходит из-за наличия апериодической составляющей, которая нивелируется при уменьшении времени интегрирования ПИ-регулятора. Для этого установим ![]() ,
, ![]() .
.
Полученный переходный процесс приведен на рис. 11.
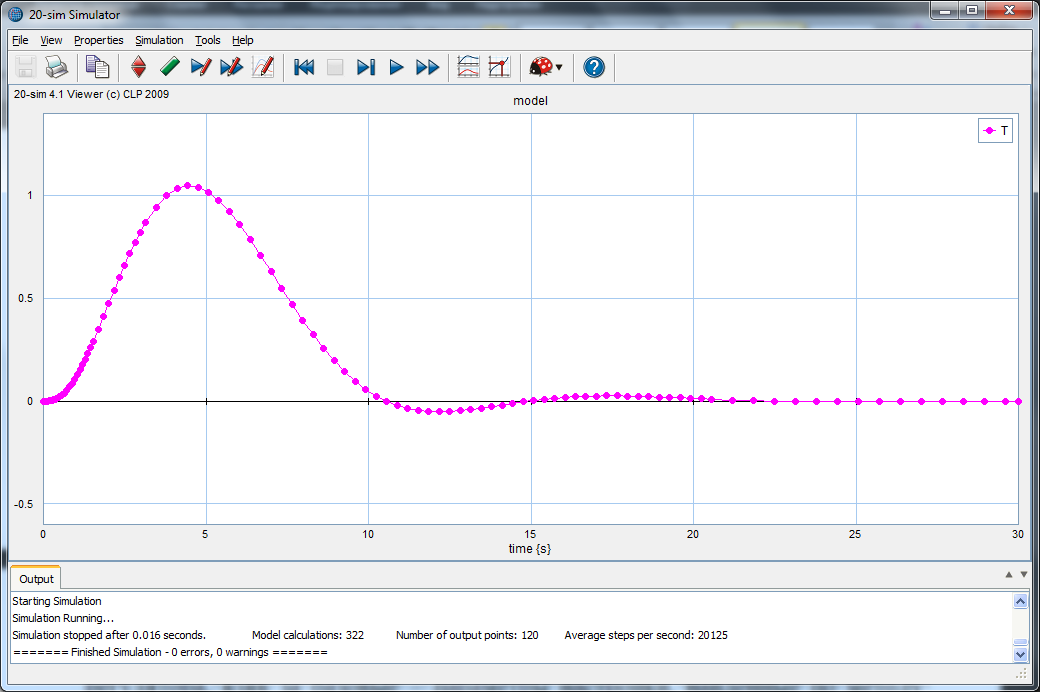
Рис. 11. Переходный процесс в САР, настроенной по методу Зиглера-Николса с уменьшенным временем интегрирования регулятора (![]() ,
, ![]() )
)
Так как полученный переходный процесс не отвечает требованиям, предъявляемым к регулированию температуры, то необходимо оптимизировать переходный процесс, путем ручной настройки ПИ-регулятора, взяв за базовые – параметры настройки, найденные по методу Зиглера-Николса.
На рис. 12 приведен отклик на единичное возмущающее воздействие САР при параметрах регулятора, полученных путем ручной настройки:
![]() ,
, ![]() .
.
Оценка качества процесса регулирования
Качество процесса регулирования оценивается тремя основными параметрами: степенью затухания, перерегулированием и временем регулирования [iii].
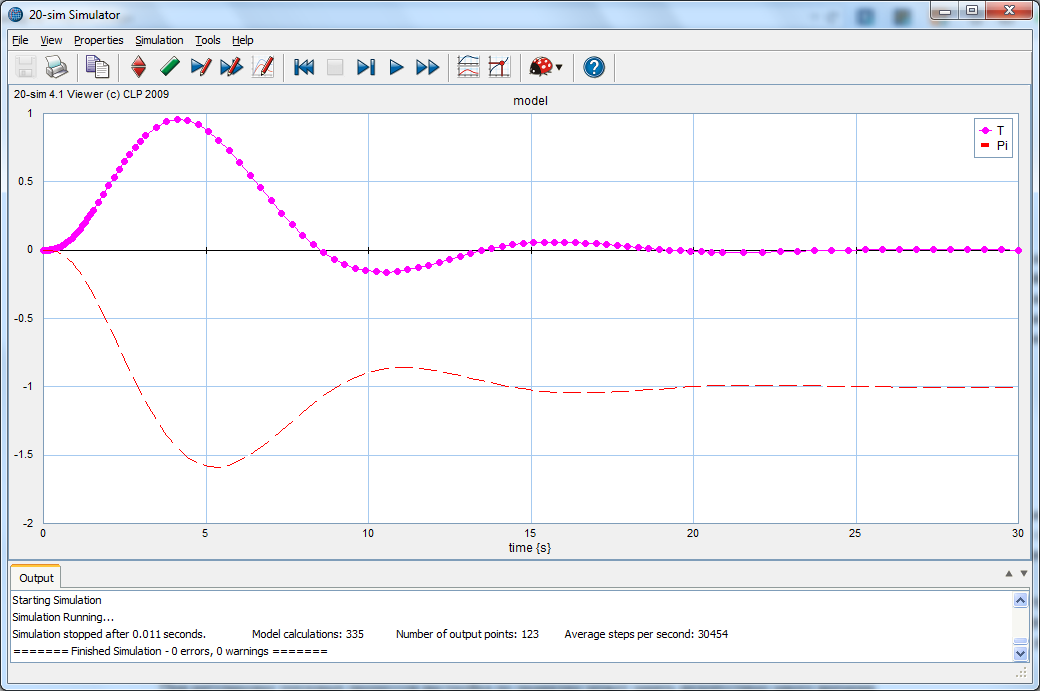
Рис.12. Переходный процесс в САР, настроенной ручным методом ![]() ,
, ![]() .
.
Степень затухания ![]() - это отношение разности нечетных (первой и третьей) амплитуд колебаний регулируемой величины к первой:
- это отношение разности нечетных (первой и третьей) амплитуд колебаний регулируемой величины к первой:
![]()
Перерегулирование ![]() - есть отношение второго (отрицательного) отклонения к первому (положительному) в процентах:
- есть отношение второго (отрицательного) отклонения к первому (положительному) в процентах:
![]() .
.
Время регулирования ![]() , промежуток времени, в течение которого отклонение регулируемой величины от заданного значения делается меньше определенной наперед заданной величине
, промежуток времени, в течение которого отклонение регулируемой величины от заданного значения делается меньше определенной наперед заданной величине![]() . Пусть в нашей САР
. Пусть в нашей САР ![]() =0,05.
=0,05.
До оптимизации определить параметры качества переходного процесса (рис. 10) не возможно, так как форма переходного процесса отличается от стандартной.
После изменения параметров настроек ПИ-регулятора получили параметры качества (рис. 11):
![]()
![]()
![]() с.
с.
После увеличения пропорционального коэффициента получаем (рис. 12):
![]()
![]()
![]() с.
с.
Таблица 2
Сравнительный анализ показателей качества
Вариант | Параметры |
|
|
|
1 |
| 12,17 | 4,9 | 0,97 |
2 |
| 16,69 | 16,7 | 0,94 |
Отношение параметра по первому и второму варианту |
|
|
|
Выводы
Параметры настройки, найденные по методу Зиглера-Николса обеспечивали сходящийся процесс с временем регулирования 12,3 с, однако форма процесса не удовлетворяла требованиям, поэтому понадобилась оптимизация. Таким образом, при сравнении двух вариантов параметров настроек получили, что первый вариант обеспечивает наилучшие параметры качества переходного процесса. По сравнению со вторым, первый вариант иммет время регулирования в 1,37 раз меньше, перерегулирование – в 3,3 раз меньше, а степень затухания в 1,3 раза больше.
Список использованных источников
i Яковлев системы автоматики: Текст лекций. – Чебоксары: Изд-во Чуваш. ун-та,1993.- 176с.
ii , , . Моделирование динамических систем на ПЭВМ с использованием программы «20-sim». Ч.2. Системы повышенной сложности: Учеб. пособие - Лабораторный практикум - М.: Изд. МЭИ, 2007.- 104 с.
iii Ротач автоматического управления. Учебник для вузов. - 2-е изд., перераб и доп. — М.: Издательство МЭИ,2004. - 400 с.
