Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 004.3
А. Ж. СЕЙДАХМЕТ, И. С. ГРИЦЕНКО, А. Г. ЛЕОНТЬЕВ
Казахский национальный университет им. аль-Фараби, Алматы, Казахстан
ТЕРМИНАЛЬНОЕ УПРАВЛЕНИЕ МНОГОЗВЕННЫМ МАНИПУЛЯТОРОМ
Аннотация. В статье рассмотрен один из способов целевого управления манипулятором, бросающим предмет (мяч) в цель. Изложены два основных способа такого терминального управления – с линейно меняющимся ускорением и с перехватом цели.
Ключевые слова: манипулятор, целевое управление, схват.
Аңдатпа. Мақалада допты нысанаға лақтыратын манипулятор басқаруының бір әдісі қарастырылған. Мынадай терминалды басқарудың екі негізгі әдісі - сызықты өзгеретін үдеумен және нысананы ұстап алу.
Түйін сөздер: манипулятор, нысаналы басқару, ұстағыш.
Annotation: The article describes one way to target manipulator control, throwing object (the ball) into a goal. Set out two main ways this terminal control - with linearly changing acceleration and target interception.
Keywords: manipulator, targeted control, gripper.
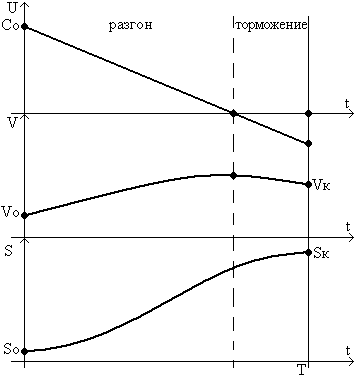
При управлении многозвенными манипуляторами рассматриваются различные режимы, наиболее простым из которых является режим позиционирования, заключающийся в переводе конечного аффектора (схвата) из одной точки в другую с разгоном или торможением – управление по положению схвата.
В данной работе рассматривается управление манипулятором по вектору скорости схвата, причем задатчиком движения при этом должен быть терминальный задатчик, в этом случае осуществляется целевое управление манипулятором, целью которого является вывод схвата в определенную целевую точку пространства, в которой он должен обладать определенным вектором скорости.
Такое управление применяется в роботах, предназначенных для бросания различных предметов (мячей, шаров, дротиков) в цель – робот-гольфист, робот баскетболист и т. д.
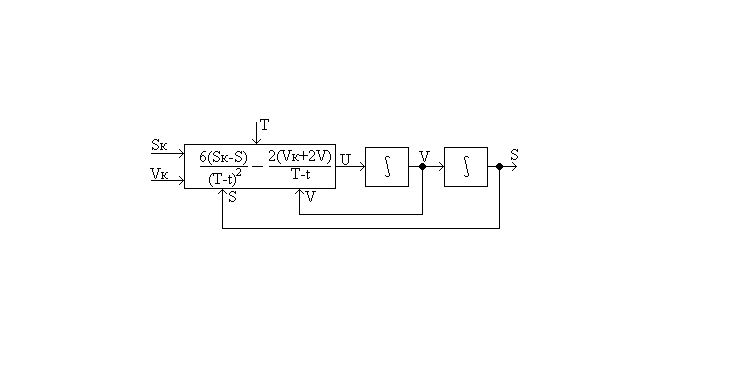
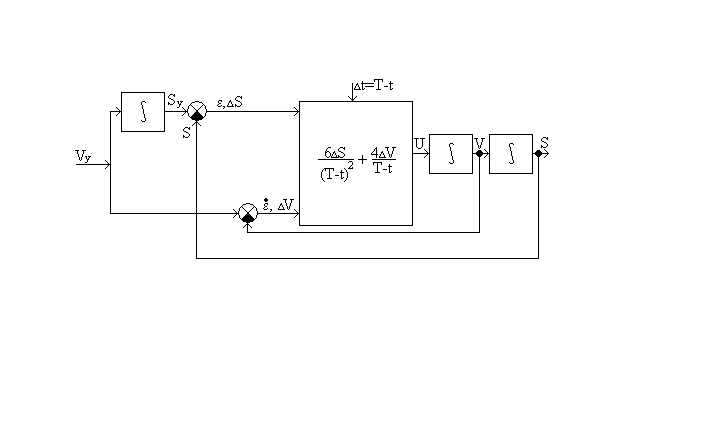
Функциональная схема такой системы показана на рисунке 1. Она состоит из терминального задатчика и системы программного управления манипулятором по вектору скорости.
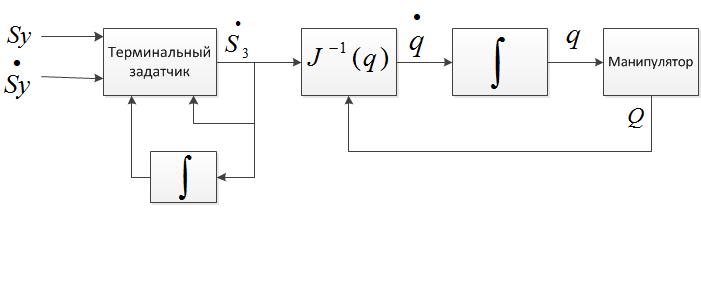
Рисунок 1 - Терминальное управление манипулятором по вектору скорости
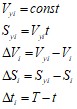
Здесь приняты следующие обозначения:
![]()
![]()
![]()
![]()
![]()
![]()
![]()