

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Муниципальное автономное общеобразовательное учреждение
гимназия № 18
Тема: «СОЦИАЛЬНЫЕ РОБОТЫ В СПОРТИВНОМ СЕРВИСЕ: МОЙ «РОБОТ-ПРИЛИПАЛА AMS (ASSISTANT MAUNTINE SKIER)»
Секция: технология
Исполнитель:
Гонцова Анна Михайловна,
ученица 3 класса, МАОУ
гимназии №18 г. Нижний Тагил
Научные руководители:
,
учитель начальных классов МАОУ
гимназия №18
,
ст. преподаватель кафедры ФМО
НТФ ИРО
г. Нижний Тагил, 2016
СОДЕРЖАНИЕ
Введение…………………………………………………………………………..3
Глава 1. Робототехнические и интеллектуальные системы в современном мире
Социальный робот – помощник будущего……………………………….5 Использование роботов в спорте………………………………………...10Глава 2. Технология создания и перспектива использования робототехнической системы в горнолыжном спорте
2.1. Характеристика LEGO mindstorms EV3, как основы создания интеллектуальной робототехнической системы………………………………12
2.2. Конструирование «робота-прилипалы» инструментами
LEGO mindstorms EV3…………………………………………………………..13
2.3. Условия и возможности применения «робота-прилипалы» в сервисной поддержке горнолыжника………………………………………………………21
Заключение………………………………………………………………………23
Список источников и литературы………………………………………………25
Приложение «Паспорт на технический экспонат «Робот-прилипала LEGO mindstorms EV3…………………………………………………………………..26
введение
Еще не так давно наши бабушки и дедушки не могли и представить себе, что можно общаться на расстоянии, используя небольшое мобильное устройство, а теперь быстро развивающиеся Интернет-сервисы и IT-технологии позволяют нам то, что раньше казалось невозможным. Сегодня расстояние и время не играют никакой роли – связаться с человеком можно всегда и везде. Современные технологии развиваются очень быстро и достигли высокого уровня в сфере промышленности, авиа-, судостроения и в том числе, в робототехнике.
Робототехника – одно из актуальных современных направлений в развитии не только индустрии, но и различных сфер жизни нашего общества, в том числе, социальной. Сейчас очень много программ и фильмов, посвященных достижениям современной робототехники, в которых роботы помогают людям в решении жизненно важных задач. Для нас уже привычными стали такие слова, как «робототехника», «нанотехнологии».
Роботы используются на заводах и промышленных предприятиях для выполнения однообразной и часто опасной работы. Роботы пока ещё не заменили полностью людей в промышленности, но использование труда человека в производстве сокращается. Полностью автоматизированные фабрики есть в Техасе, это, например, фабрика IBM для сборки клавиатур.
Однако мой интерес связан с социальной робототехникой, а именно с роботами-помощниками человека. В этом году я стала заниматься в лаборатории Робототехники и меня появилась идея о создании такого робота-помощника. Сферой будущего применения робота я выбрала горнолыжный спорт, которым занимаюсь уже 5 лет. Инвентарь спортсмена-горнолыжника имеет большой объем и вес и доставка такого снаряжения от базы размещения горнолыжников до стартовой трассы достаточно проблематична. Учитывая то, что я недавно начала заниматься основами робототехники, мне стало интересно, а можно ли разработать модель робота-помощника в спортивном сервисе из тех строительных элементов и датчиков набора, с которым я работаю. Мы определились с главной проблемой, которую будем решать – это определение возможности доставки горнолыжного снаряжения для конкретного спортсмена, закрепленным за ним «роботом-прилипалой».
Таким образом, актуальность нашего исследования обосновывается значимостью социальной робототехники и необходимостью изучения особенностей ее применения в спортивном сервисе.
Так родилась идея создания робота-прилипалы AMS.
Объект: социальная робототехника
Предмет: возможности роботов-помощников в горнолыжном сервисе.
Цель исследования: разработать модель робота-помощника, применимого в сервисе горнолыжного спорта из элементов набора LEGO Mindstorms EV3.
Задачи:
Найти информацию о существующих социальных роботах, их возможностях; Изучить возможности использования роботов в спортивном сервисе; Создать модель робота-прилипалы, способного доставлять снаряжение для конкретного спортсмена; Охарактеризовать особенности конструкции, определяющие работоспособность модели. Рассмотреть перспективы использования данной модели.Практическая значимость работы заключается в разработке и апробации возможностей модели социального робота, способного оказывать помощь при транспортировке груза и сопровождении конкретного человека.
Работа состоит из введения, двух глав, заключения, списка литературы и приложения. В первой главе нами рассматриваются наиболее популярные модели социальных роботов, информацию о которых мы нашли в рамках данного проекта. Нами были охарактеризованы основные направления использования роботов в спорте.
Во второй главе, являющейся практической частью исследования, нами описывается процесс разработки модели робота-прилипалы, а также результаты ее тестирования, оценки сформированных характеристик и дальнейшего совершенствования. Отдельное внимание мы уделяем перспективам использования модели робота-прилипалы, выходя за рамки изначальной идеи его использования в горнолыжном сервисе. Заключение содержит описание результатов исследования и степени достижения поставленных задач.
ГЛАВА 1. РОБОТОТЕХНИЧЕСКИЕ И ИНТЕЛЛЕКТУАЛЬНЫЕ СИСТЕМЫ В СОВРЕМЕННОМ МИРЕ
1.1. Социальный робот – помощник будущего

Прежде чем, мы приступим к характеристике социальных роботов, определим – как и когда появились роботы в нашей жизни. Впервые слово «робот» употребил чешский писатель-фантаст Карел Чапек в рассказе, в котором люди создают себе механических помощников. Поэтому «робот» происходит от чешского слова robot – подневольный труд или rob — раб1. Особенно удивительно то, что придумал он эту фантастическую историю в 1920 г. – почти сто лет назад, когда еще не было ничего из той техники, которая окружает нас сейчас.
Робот – это автоматическое устройство, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях или при относительной недоступности объекта. Действует робот по заранее заложенной программе и получает информацию о внешнем мире от датчиков, робот самостоятельно осуществляет производственные и иные операции2.
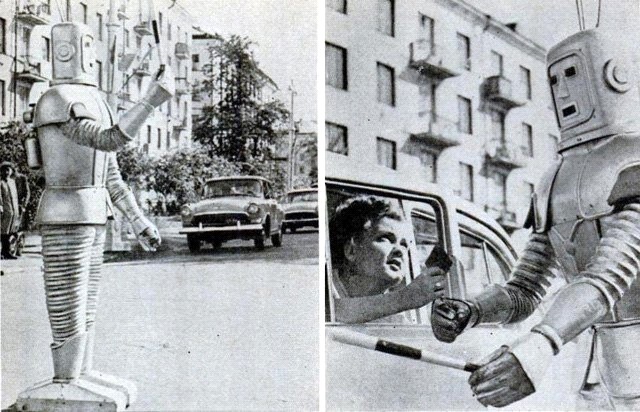
Интересно, что сразу после полета первого человека в космос – Юрия Гагарина в 1961 г. многие ученые просто «заразились» идеей превращения фантастики в реальность. И тогда тема роботов-помощников для людей, которые уже смогли покорить Космос, стала особо актуальной. В 1967 г. была придумана модель робота-инспектора ГАИ, который должен был помогать регулировать движение машин на перекрестках Москвы. Предполагалось, что он будет выполнять почти 80 команд и управляться дистанционно. Но эта идея воплотилась только в модели.
Сегодня роботы вошли прочно в нашу жизнь и появилось целое направление в науке – робототехника.
Робототехника – прикладная наука, занимающаяся разработкой автоматизированных технических систем3. Современные роботы, созданные благодаря самым последним достижениям науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций.

На сегодняшний день активно развивается направление робототехники, связанное с разработкой и производством устройств, предназначенных для ухода за домом. Многие зарубежные компании занимаются разработкой социальных роботов или роботов-помощников человека. Такие роботы признаны не только быть «умными», функциональными, освобождать нас от многих домашних дел, экономить наше время, но и ухаживать за нами, развлекать нас.
Социальный робот — робот, способный в автономном или полуавтономном режиме взаимодействовать и общаться с людьми в общественных местах или дома4.
Проанализировав различные Интернет-источники, мы считаем важным представить наиболее популярные модели роботов-помощников.

Роботы-пылесосы. Ярким представителем таких роботов является Roombo, разработанный и продаваемый компанией iRobot5. Он представляет собой роботизированное устройство для уборки квартиры (См. рис. 3).
Робот, способный сортировать одежду. Робот PR2 разбирается в произвольно набросанной одежде и сортирует её по соответствующим коробкам (См. рис. 4)6.
Пермские инженеры создали домашнего помощника – «говорящие» кнопки для напоминаний (См. рис. 5). Кто-то в семье достает из холодильника, например, последний пакет молока. Тут же нажимает кнопку с обозначением «Молоко», которая прикреплена к холодильнику, и она начинает светиться. В этот же момент продукт попадает в список покупок, который все члены семьи могут видеть на своих гаджетах через приложение. Так что тому, кто пошел в магазин, не надо спрашивать у домашних «Что купить?». И если кто-то из членов семьи уже купил молоко, то вычеркивает его из списка, и в этот же момент кнопка на холодильнике гаснет7.

Рис. 5. Роботизированные кнопки для напоминаний
Так что, если раньше холодильники были увешаны магнитами из разных стран, то теоретические в ближайшем будущем на них смогут разместиться целые коллекции таких кнопок.
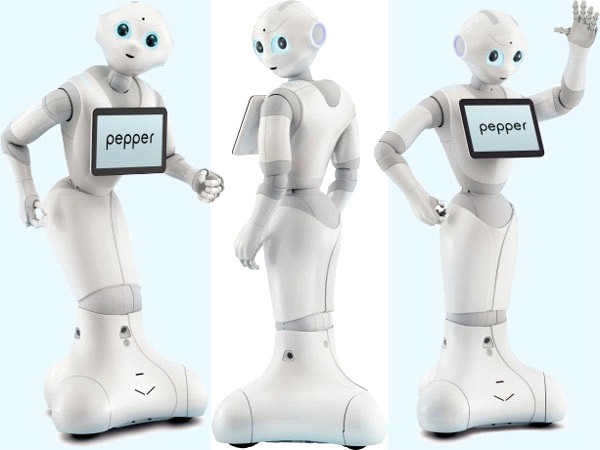
Роботы-сиделки. Большинство подобных устройств создаются в помощь пожилым людям и людям с ограниченными возможностями передвижения (Рис. 6). Но практика показывает, что основные функции роботов — выметать пыль, помогать делать покупки, заботиться о доме — отходят на второй план. Основным их назначением оказывается наполнение дома жизнью и движением. Они в значительной степени заменяют домашних животных, с той лишь разницей, что роботы избавляют от излишней о себе заботы: их не нужно кормить, за ними не нужно убирать. Примерами таких роботов служат Wakamura, RIBA, PaPeRo, Hubo. К ним же можно отнести и робота Pepper.
Робот Pepper на сегодня бесспорно является одним из самых продвинутых в мире, ведь он способен распознавать эмоции человека (См. рис. 6). Pepper предназначен для совместной жизни с людьми. Он понимает чувства человека, выражает приязнь и сочувствие, дает советы своим хозяевам и болтает с ними. Для этого в его голову вмонтированы сразу две HD-камеры (во рту и на лбу), а в глаза — сенсоры расстояния. Это позволяет роботу распознавать эмоции находящегося рядом человека и взаимодействовать с ним. Например, если человек плачет, он пытается его утешить, а если скучает — то развеселить8.
Робот-щенок - еще один вид роботов, который получил популярность среди детей и взрослых. Примерами таких роботов являются Zoomer, Teksta.
Собака-робот Teksta подходит для детей от 2 лет, при этом он выполнен в разных цветах, чтобы с ним могли играть как мальчики, так и девочки. Появилась собака-робот в 1999 году под названием Tekno и умела очень немного. Уже тогда она завоевала сердца многих детей по всему миру (См. рис. 7)9.
Собака-робот разработана для того, чтобы научить ребенка обращаться с настоящими питомцами, при этом не заводя таковых. Многие по разным причинам не могут позволить себе настоящую собаку и робот-щенок станет отличной заменой. Робот выполняет команды, реагирует на жесты рук и голос, умеет играть с мячиком и косточкой. Подробная инструкция к роботу идет в комплекте, поэтому разобраться с этой интерактивной собакой не составит труда. Именно поэтому, купить собаку-робота ежегодно хотят все большее количество родителей и детей.

Рис.7. Собака-робот Teksta
Таким образом, мы видим, что жизнь современного человека существенно облегчилась с появлением роботов-пылесосов и даже роботов, моющих окна. Но большую часть домашних дел всё ещё приходится делать руками. Универсального робота-помощника, заменяющего человека, создать чрезвычайно трудно. На сегодняшний день многие компании занимаются этой проблемой, однако мы видим роботов, выполняющих только отдельные функции: робот-пылесос, уборщик мусора, сортировщик белья и др. Универсального робота-помощника нет. Неплохой прогресс сделала японская компания, разработав социального робота Пеппера, который умеет также распознавать эмоции и подстраиваться под настроение людей, однако и у этого робота имеются ограничения – он больше служит не как помощник, а как аниматор.
1.2. Использование роботов в спорте
Как мы выяснили, роботы незаменимые помощники в производстве, все чаще стали использоваться и как роботы-помощники людей. Но еще одним достаточного интересным и перспективным направлением применения роботов становится спорт. Правда, роботы в нем не столько помощники, сколько соперники человека! Роботы уже принимали состязание с людьми в шахматах, в беге и даже в плавании10. Несмотря на серьезные достижения науки и техники, роботам пока еще сложно выигрывать состязания у спортсменов.
Мир современной спортивной робототехники очень широк и многообразен. Это и такие «серьезные» соревнования, как робофутбол, и такие «научные», как соревнования Фестиваля мобильных роботов, и Евробот, и многие другие. О популярности такого направления говорит и тот факт, что в России уже существуют Ассоциация спортивной робототехники, а в Москве проводится ежегодная всероссийская Спартакиада роботов11. На этой Спартакиаде роботы выступают в 8-ми различных видах робо-спорта. При этом в некоторых видах состязаний основной упор делается на программную начинку роботов, на то, что преимущество будет у более «умного», оснащенного эффективными датчиками робота. В других же видах большее значение имеют конструктивные характеристики роботов, их динамика.
Соревнования у роботов имеют строгие правила, совсем как у людей.
Например, в кегельринге за наиболее короткое время робот, не выходя более чем на 5 секунд за пределы круга, очерчивающего ринг, должен вытолкнуть расположенные в нем кегли (см. рис. 8). На очистку ринга от кеглей дается максимум 2 минуты. Если робот полностью выйдет за линию круга более чем на 5 секунд, попытка не засчитывается. Во время проведения состязания участники команд не должны касаться роботов, кеглей или ринга.
Но для меня стало просто открытием, что роботы принимают участие в соревнованиях, которые очень похожи на горнолыжные (см. рис. 9). Только соревнуются они не на горе, а на плоской поверхности, поэтому до настоящих горнолыжников им в горнолыжной дисциплине «слалом» еще далеко.
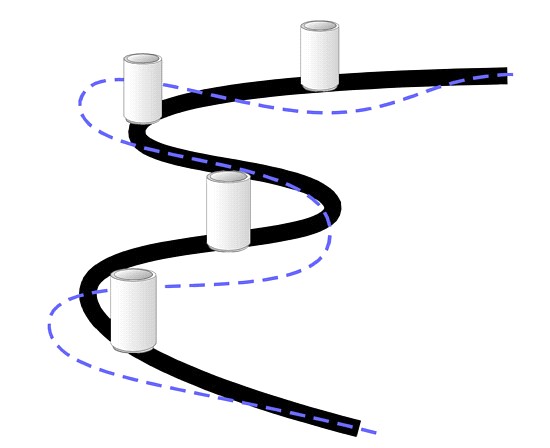
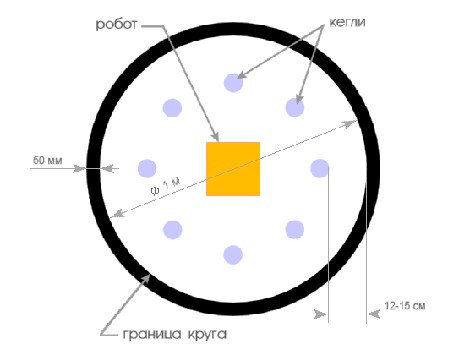
Рис. 8. Кегельринг Рис. 9. Слалом
Условия состязаний для роботов заключаются в следующем: за наиболее короткое время робот должен пройти трассу, обозначенную черной линией, от места старта до места финиша, обходя препятствия-кегли, расположенные на линии12.

Первое препятствие-кеглю робот должен обойти с левой стороны и далее обходить кегли попеременно с правой и с левой сторон (принцип классического слалома). На прохождение дистанции дается максимум 3 минуты. В конце дистанции на трассе могут быть установлены ворота, через которые роботу необходимо пройти. За столкновение с кеглями или "срезание" маршрута роботу начисляются штрафные очки. Во время проведения состязания участники команд не должны касаться роботов.
Таким образом, мы видим, что роботы в спорте сегодня активно применяются скорее как участники соревнований, а не как помощники спортсменов. Мы же хотим рассмотреть возможность использования функционала робота-помощника именно в спортивном сервисе.
ГЛАВА 2. ТЕХНОЛОГИЯ СОЗДАНИЯ И ПЕРСПЕКТИВА ИСПОЛЬЗОВАНИЯ РОБОТОТЕХНИЧЕСКОЙ СИСТЕМЫ В ГОРНОЛЫЖНОМ СПОРТЕ
2.1. Характеристика LEGO mindstorms EV3, как основы создания интеллектуальной робототехнической системы
LEGO MINDSTORMS – это робототехнический конструктор, который объединяет универсальность системы строительства LEGO с самыми передовыми технологиями.
LEGO MINDSTORMS Education EV3 это третье поколение робототехнических конструкторов серии LEGO Mindstorms. Данный набор разрабатывался в массачусетском технологическом институте (MIT - Massachusetts Institute of Technology) совместно с компанией LEGO. Он позволяет конструировать роботов с множеством датчиков и моторов, или измерять расстояние, освещенность, температуру, проводя научные эксперименты. Первый LEGO Mindstorms RCX, был выпущен в 1998. Следующим поколением стал LEGO MINDSTORMS Education NXT, выпущенный в 2006, он заметно расширил функционал первого набора, также в нем использовался новый микроконтроллер ARM7 32bit CPU. ROBOLAB, разработанный в качестве основы для LabView компанией National Instruments13.
LEGO MINDSTORMS Education EV3 был улучшен новым процессором, увеличено количество поддерживаемых портов, новым программным обеспечением, новым USB портом, слотом для SD карт и функцией auto-ID. С фукцией Auto-ID микрокомпьютер EV3 и программное обеспечение MINDSTORMS Education EV3 могут автоматически определять какое устройство подключено в каждый порт. Таким образом, мы сможем быстро обнаружить ошибку при соединении моторов и сенсоров.
Еще одним преимуществом данного конструктора является цепное последовательное соединение по USB. Мы можем соединить до 4 микрокомпьютеров EV3 через USB порты. При помощи данной функции можно программировать все 4 микрокомпьютера как одно целое, получая большое количество портов. Это позволит создавать действительно огромные конструкции.
То, что нам действительно пригодится при создании робота-прилипалы – это поддержка Bluetooth и Wi-Fi. Мы можем программировать управление моделью робота с компьютера без проводов, через Bluetooth, используя для этого микроконтроллеры.

«Сердцем» робота является программируемый модуль EV3, который служит центром управления и энергетической станцией конструируемой модели (Рис. 11). В него входит:
- 4 порта ввода: 1, 2, 3, 4 (для подключения датчиков к кубику EV3) 4 порта выхода: A, B, C, D (для подключения датчиков к кубику EV3) 1 Мини USB PC порт (для подключения кубика EV3 к компьютеру) USB хост-порт (для подключения Wi-Fi-адаптера и “организации последовательного опроса”) Микро-SD Card порт (для увеличения объема доступной память кубика EV3) Встроенный динамик
Запрограммировать робота можно как при помощи специального программного обеспечения на компьютере (LEGO Education software), так и при помощи микроконтроллера EV3. Программирование на компьютере более удобно и понятно, т. к. используется наглядный графический интерфейс для облегчения восприятия программ.
2.2. Конструирование «робота-прилипалы» инструментами
LEGO mindstorms EV3
В качестве конструкторского материала был выбран набор LEGO Mindstorms EV3, так как я работаю с этим набором уже второй год и знаю все его детали, их назначение, основные способы крепления деталей и принципы работы электронных элементов: моторов, датчиков.


Рис. 12. Набор конструктора LEGO mindstorms EV3
В данном наборе представлен огромный ассортимент деталей:
- конструкционные (строительные) элементы: технические балки семи разных размеров (5-ти - , 7-ми –модульные и т. д.), угловые/изогнутые балки; соединительные элементы: штифты, оси, втулки, фиксаторы, комбинированные соединители разных видов и размеров; колеса: ступицы, шины, зубчатые колеса (шестеренки, червячный вал, крестовой кноб) разных видов и размеров; электронные элементы: программируемый модуль, большие и средний моторы, пять датчиков (ультразвуковой датчик, датчик наклона, датчик света/цвета, датчики касания), соединительные кабели.
Всего набор насчитывает 541 деталь. Данный набор позволяет сооружать различные механические конструкции, что ведет к упрощению и точности работы модели.
Этапы конструирования и программирования модели
шаг. Создание тележкиДля создания тележки, которая отвечает за направленное движение модели, я использовала программируемый модуль EV3, два больших мотора, пара ступиц и шин, крепление с железным шаром и различные соединительные элементы: балки, оси, штифты, втулки. К программируемому модулю я подсоединила по бокам два больших мотора, от которых провела оси и надела на них по колесу, состоящих из ступицы и шины – получилась двухмоторная тележка. Затем я соединила порты модуля с портами моторов с помощью кабелей. Для устойчивого положения тележки на внутренней стороне напротив колес я установила крепление с железным шаром. Таким образом, тележка имеет три точки опоры.

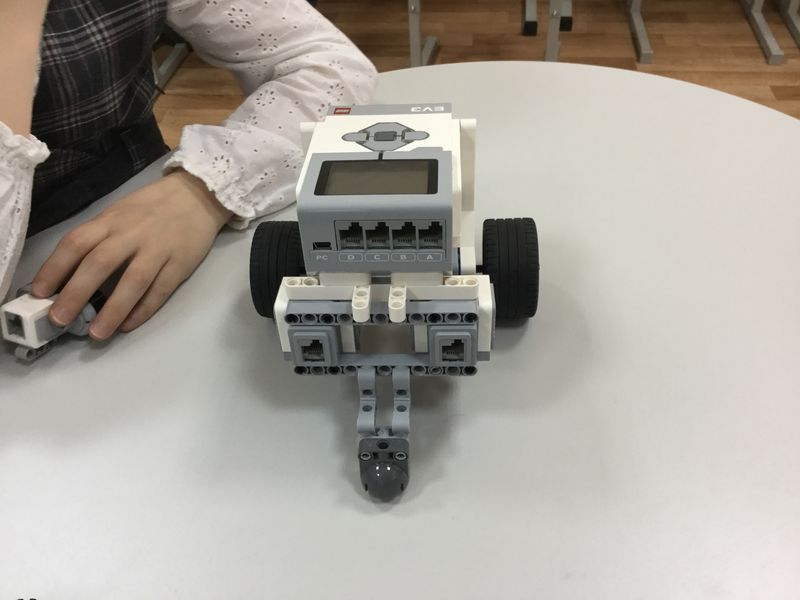
Рис. 13. Процесс сборки тележки
шаг. Создание прицепа
Для прицепа мне понадобились крепление с железным колесом, квадратные и простые балки, штифты, втулки, оси.
Из балок и осей я сконструировала небольшой прицеп, закрепив все элементы втулками. В качестве механизма передвижения я установила квадратную балку с креплением и железным колесом на одной из сторон. Противоположной стороной закрепила прицеп к тележке.

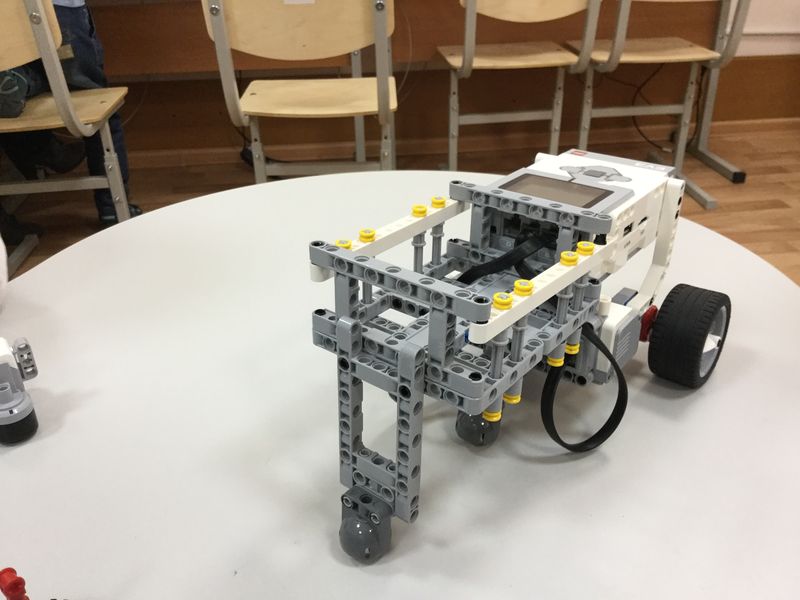
Рис. 14. Конструирование прицепа
шаг. Применение ультразвукового датчика (датчика расстояния)
Для того, чтобы мой робот мог различать меня и правильно работать, я установила в передней части тележки ультразвуковой датчик. Он позволит определять расстояния до шагающего объекта (меня) и в зависимости от полученной величины, будет двигаться вперед, либо стоять. Для этого мне понадобились сам датчик и пару соединительных элементов. Датчик расположен по центру робота в нижней передней части.

Р
Рис. 15. Установка датчика расстояния
шаг. Программирование робота
Работа робота заключается в следующем: датчик расстояния постоянно измеряет расстояние до шагающего объекта, если оно больше 50 см, робот двигается вперед (как бы преследует), если нет – останавливается.
Для программирования робота я использовала несколько блоков: блок программирования датчика расстояния, блок программирования рулевого управления моторами, блоки операций: цикл, переключатель (ветвление).
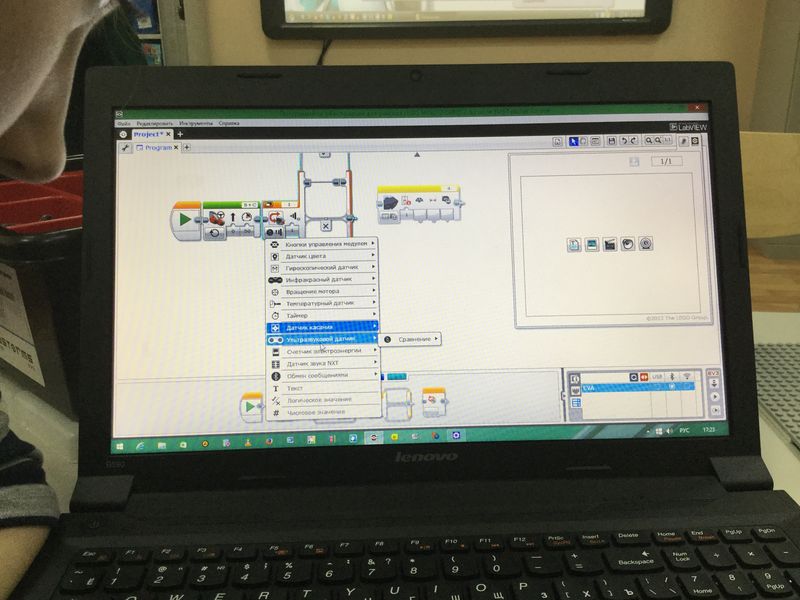
Рис. 16. Программирование модели робота
В самом начале программы мы ставим блок «Переключатель», задавая условие, связанное с измерением расстояния датчиком. Затем в блоке прописываем действия робота, если условие – «истина» и наоборот, «ложь». В первом случае включаем моторы на среднюю мощность и задаем направление движения «вперед», во втором случае останавливаем работу моторов. Чтобы программа работала постоянно, я заключила все блоки в цикл.
Получилась следующая программа (см. рис.17).
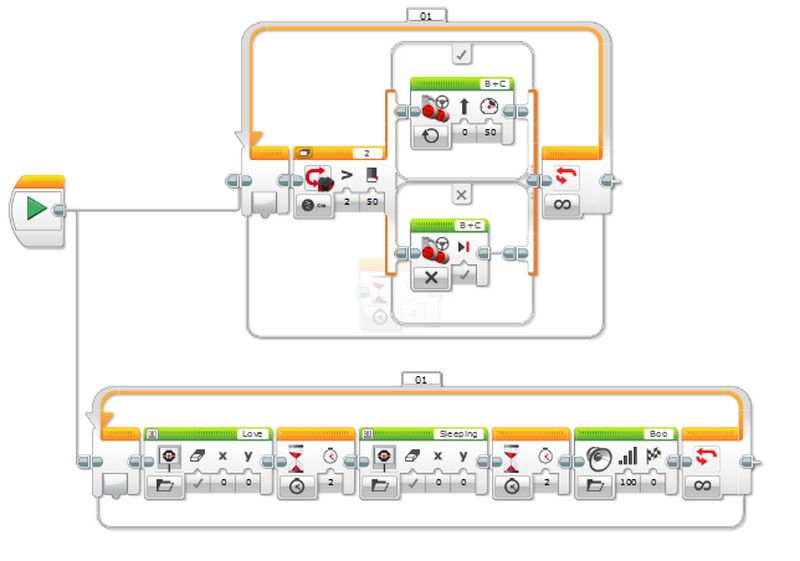
Рис.17. Программа модели-робота прилипалы
Для того, чтобы сделать робота немного «человечным», я добавила изображение глаз, выводящееся на модуль, которые моргают, а также добавила несколько фраз, чтобы робот мог общаться со мной. Эти фразы я записала на микрофон в специальную программу, а затем импортировала полученные звуковые файлы в свою программу.
5 шаг. Тестирование робота
Скопировав программу на модуль с помощью USB-кабеля, я приступила к тестированию моего робота-помощника. Я шла вдоль комнаты небыстрым шагом, а робот ехал за мной. Как только я останавливалась, робот подъезжал ко мне, соблюдая дистанцию в 50 см, и останавливался. Если я продолжала движение, робот - тоже. Через небольшие промежутки времени робот издавал определенные фразы, подбадривая меня.


Рис.18. Процесс тестирования робота на тележке колесного типа
В результате у нас получилась модель робота, который представляет собой конструкцию колесного типа, имеет прицеп для размещения в нем снаряжения и передвигается по прямой линии. С помощью инфракрасного датчика робот-помощник определяет расстояние до спортсмена - едет за ним, пока расстояние не достигнет 50 см. Как только спортсмен продолжает движение, робот-помощник также продолжает двигаться. Именно поэтому мы и назвали нашего робота прилипалой, так как его задача – сопровождать везде своего спортсмена. Эти характеристики робот продемонстрировал в ходе тестирования в лаборатории лего-конструирования.
В ходе тестирования модели робота в тех условиях, в которых и планируется использование робота-помощника (горнолыжный комплекс) был выявлен ряд недочетов нашей конструкции:
- модель робота-помощника перемещалась только по прямой линии и в случае поворота спортсмена или смещения в сторону датчик расстояния переставал видеть «цель» и останавливался.
- модель робота не различала своего спортсмена и двигалась за каждым, кто попадался в «поле зрения» датчика расстояния.
- проходимость модели робота также оказалась достаточно низкой – тележка колесного типа не могла заехать по наклонной плоскости, останавливалась при переходе с трассы (укатанный снег) на мягкий снег.
Все эти недочеты оказались существенными для дальнейшего применения модели робота в сервисной поддержке горнолыжника.
Модель робота нуждалась в доработке с учетом проблем, выявленных при тестировании, что мы и сделали на следующем этапе.
6 шаг. Доработка модели
Все средства передвижения (обслуживающая техника), которые применяются на горнолыжных комплексах, имеют гусеничные колеса, что позволяет им перемещаться по снегу и в гору, поэтому гусеничный способ передвижения мы решили использовать в конструкции нашей модели. Для более качественного сцепления гусениц с поверхностью, по которой передвигается робот, мы добавили на гусеницы резиновые фиксаторы (Приложение 1).
Гусеничные колеса, входящие в набор LEGO Mindstorms EV3, обладают еще одним существенным качеством – они позволяют модели робота легко поворачивать в любом направлении и даже полностью разворачиваться вокруг своей оси.
Для того, чтобы модель робота стала «прилипалой» только для своего спортсмена, добавляем в модель инфракрасный датчик, а спортсмену «вручаем» небольшой «маяк».
Удалённый инфракрасный маяк разработан для использования с инфракрасным датчиком EV3 (Приложение 2). Маяк излучает сигнал, улавливаемый датчиком, и модель робота движется за ним в любом направлении. Как только модель робота достигает расстояния в 50 см. до спортсмена – происходит остановка. Если спортсмен решил идти дальше, модель робота-прилипалы также продолжает движение в том направлении, в котором движется его «цель». За другим человеком эта модель робота-прилипалы уже не пойдет, так как своего «хозяина» он определяет по сигналу маяка.
Работу ИК-датчика запрограммировали следующим образом, добавив соответствующий блок в программу и настроив регулирование моторов в зависимости от его показаний (см. рис. 19).

Рис.19. Программирование работы робота с ИК-датчиком
Оценка качества выполнения действий
Итак, у нас получилась доработанная модель робота-прилипалы. Сравним характеристики наших двух моделей по трех-балльной системе: от 0-2.
- 0 баллов – действие не выполнено; 1 балл – действие выполнено, но не точно; 2 балла – действие выполнено точно.
Таблица 1. Оценка качества выполнения действий двух моделей робота-прилипалы
Проверяемые способы действия робота-помощника | Модель №1 с тележкой колесного типа | Модель №2 с тележкой гусеничного типа и ИК-маяком |
Перемещение по прямой линии | 2 | 2 |
Перемещение по траектории движения спортсмена | 0 | 2 |
Выдерживание дистанции в 50 см. до спортсмена | 2 | 2 |
Остановка модели при остановке спортсмена | 2 | 2 |
Перемещение только за своим спортсменом | 0 | 2 |
Подъем по наклонной плоскости в условиях лаборатории | 1 | 2 |
Подъем по наклонной плоскости на горнолыжном комплексе | 0 | 1 |
Перемещение по жесткому снегу (укатанная дорога, трасса) | 1 | 2 |
Перемещение по мягкому снегу (вне трассы, вне дороги) | 0 | 1 |
Итого | 8 баллов | 16 баллов |
Итак, как мы видим по результатам такой проверки, доработанная модель превосходит по своим характеристикам модель №1 практически в два раза. В этом тестировании мы основное внимание уделили способам действия модели робота-помощника, приблизив условия его тестирования к тем, в которых может применяться в будущем сам «робот-прилипала» в сервисной поддержке горнолыжника.
Грузоподъемность прицепа для снаряжения мы не подвергали такой серьезной проверке, так как это всего лишь модель, которая показывает нам возможность использования роботов в этом направлении.
Несмотря на это, прицеп мы также делали с учетом особенностей дальнейшего применения уже настоящего робота-помощника в сервисной поддержке горнолыжника – он не имеет «сплошных» стенок и дна и представляет собой каркас короба. Это очень облегчает конструкцию, а при использовании в горнолыжном сервисе в таком коробе не будет скапливаться снег.
Таким образом, мы создали модель робота-прилипалы, способного доставлять снаряжение для конкретного спортсмена. Рассмотрим основные перспективы использования такого робота.
2.3. Условия и возможности применения «робота-прилипалы» в сервисной поддержке горнолыжника
1 Роботы и робототехнические устройства. 2016. - [Электронный ресурс] – Режим доступа: http://www. rtc. ru/images/docs/RiRU_Klassifikacija_1_red-do30_11_2015.pdf.
2 Робот. Словари и энциклопедии на Академике. [Электронный ресурс] – Режим доступа: http://dic. academic. ru/dic. nsf/ogegova/208606
3 Роботехника. Словари и энциклопедии на Академике. [Электронный ресурс] – Режим доступа: http://dic. academic. ru/dic. nsf/ogegova/208607
4 Социальный робот [Электронный ресурс] – Режим доступа: http://www. social-idea. ru/ideas/580
5 Робот-пылесос IRobot Roombo. 2016. - [Электронный ресурс] – Режим доступа: http://qrobot. ru/sravnenie_irobot_roomba
6 Робот pr2 сортирует и укладывает белье. 2016. - [электронный ресурс] – режим доступа: http://www. robo-geek. ru/servisnye-roboty/robot-pr2-sortiruet-i-ukladyvaet-bele
7 Пермские инженеры создали домашнего помощника – «говорящие» кнопки для напоминаний. 2016. - [Электронный ресурс] – Режим доступа: http://www. chitaitext. ru/novosti/permskie-inzhenery-sozdali-domashnego-pomoshchnika-govoryashchie-knopki-dlya-napominaniy/
8 Робот Pepper. 2016. - [Электронный ресурс] – Режим доступа: http://nanojam. ru/products/pepper
9 Робот-щенок Teksta. 2016. - [Электронный ресурс] – Режим доступа: http://chadorado. ru/magazin/product/581440803
10 Десять самых успешных роботов в спорте [Электронный ресурс] – Режим доступа: http://hi-news. ru/robots/desyat-robotov-kotorye-kruche-lyubogo-iz-vas-v-sporte. html
11 Ассоциация спортивной робототехники [Электронный ресурс] – Режим доступа: http://rus-robots. ru/
12 Спорт роботов [Электронный ресурс] – Режим доступа: http://myrobot. ru/sport/index. php
13 Официальный сайт LEGO mindstorms EV3 [Электронный ресурс] //Режим доступа: http://www. /ru-ru/mindstorms/about-ev3
