

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1. Программа задания
Рассчитать параметры унифицированного контура регулирования момента в системе тиристорный преобразователь-двигатель постоянного тока (ТП-ДПТ) с типовой (стандартной) настройкой второго порядка и оценить точность регулирования.
2. Исходные данные
Вариант 14
Двигатель: Uяном=47 В, Iяном=29 А, nяном=600 об/мин, Rя∑дв=0,123 Ом, л=2.
Преобразователь: Uном=120 В, Uу. ном=10 В, Iпр. ном=300 А, Rп∑=0,06 Ом, J∑=0,5 кгЧм2, Tя=0,03 с.
Шунт: Uш=75 мВ, Iш=200 А, kдт=100.
При Ф = Фном для двигателя с независимым возбуждением , поэтому практически для регулирования момента используется жесткая отрицательная связь по току якоря. Функциональная схема рассматриваемого электропривода для этого случая представлена на рис. 1.1 (а), структурная — на рис. 1.1 (б). Как известно, при синтезе регулятора тока электромеханическую связь в двигателе по ЭДС вращения не учитывают и структуру упрощают– рис.1.1 (в) (здесь не показано возмущение на контур тока в виде ЭДС вращения).
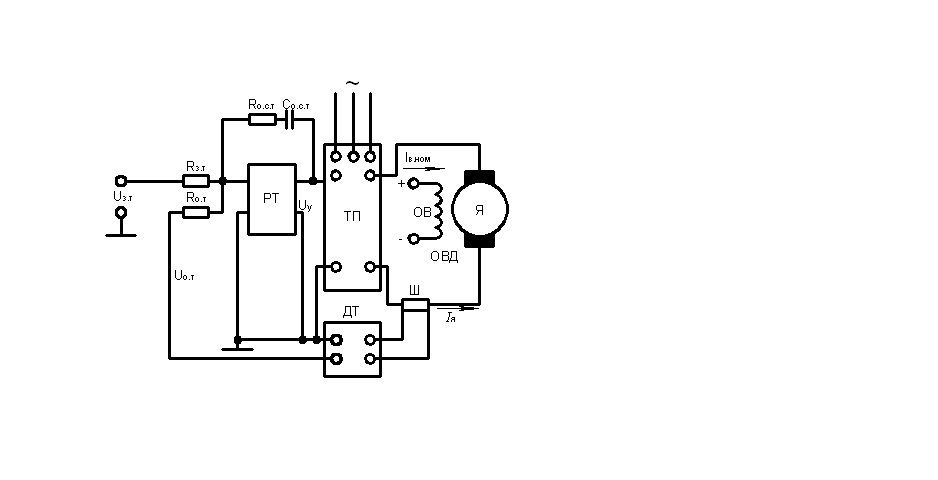
а) – функциональная электрическая схема контура регулирования тока
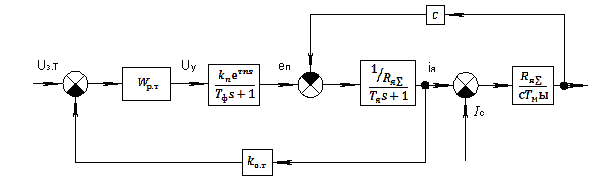
б) – структурная электрическая схема контура регулирования тока

в) – упрощенная структурная электрическая схема контура регулирования тока
Рис. 1.1. К расчету контура регулирования тока в системе ТП-ДПТ
3. Расчет
3.1. Параметры объекта регулирования схемы на рис. 1.1 (в)
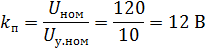
Коэффициент усиления преобразователя:
Суммарное сопротивление якорной цепи:
![]()
Здесь коэффициент 1,1 учитывает сопротивление соединительных проводов.
Постоянные времени:
Т. к. значения Тф не заданы, предположив СИФУ преобразователя полупроводниковой, примем ![]()
![]() .
.
3.2. Настройка контура регулирования
Желаемая для настройки на технический оптимум передаточная функция разомкнутого контура регулирования тока:

Передаточная функция объекта регулирования:

Передаточная функция регулятора тока:

где - постоянная интегрирования ПИ-регулятора :

Упрощенная схема регулятора тока показана на рис. 1.1 (а).
3.3. Расчет параметров схемотехники регулятора тока
Постоянная цепи обратной связи регулятора:
![]()
Емкость конденсатора при Rост=10 кОм:
![]()
Величина коэффициента обратной связи по току kот, приведенная к задающей цепи:

Коэффициент усиления регулятора:

Отсюда ![]()
![]()
Стопорный ток электропривода:
![]()
Максимальное напряжение задания тока:
![]()
Коэффициент ЭДС двигателя:

Вернемся к настройкам контура регулирования и найдем передаточные функции:
(1.1): ![]()
![]()
(1.2): ![]()
![]()
(1.3):![]()
![]()
3.4. Оценка точности регулирования тока
Для оценки точности регулирования тока в данном контуре используем формулу динамической ошибки по ускорению привода [1]:

Стопорный момент:
![]()
Относительная ошибка регулирования момента и тока в процессе пуска с Мс=0 по формуле (3.1):
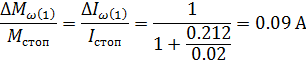
Абсолютная ошибка по току (расхождение между статической и динамической механическими характеристиками):
![]()
Абсолютная ошибка при пуске с Мс=20 НЧм:
Ошибка уменьшилась в два раза, т. к. в два раза снизилось ускорение при пуске привода.
