


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
АВТОМАТИЧЕСКАЯ ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СИСТЕМ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ ПРИ ЭКВИВАЛЕНТИРОВАНИИ ЗАПАЗДЫВАНИЯ ИНЕРЦИОННЫМИ ЗВЕНЬЯМИ
,
(Иркутский государственный лингвистический университет, г. Иркутск, Россия
Иркутский государственный технический университет, г. Иркутск, Россия)
Рассмотрен алгоритм АПО для систем регулирования с ШИМ при структурном несоответствии модели и реального объекта. Исследована работоспособность алгоритмов АПО, в анализаторах чувствительности которых осуществлено эквивалентирование по переходному процессу оператора звена запаздывания. Представлены результаты исследования работоспособности алгоритма при таком структурном несоответствии.
В настоящее время для определения оптимальных, исходя из принятого критерия значений настраиваемых параметров в автоматических системах регулирования (АСР) с широтно-импульсной модуляцией (ШИМ), распространение получили алгоритмы автоматической параметрической оптимизации (АПО), сформированные на базе методов теории чувствительности [1-3].
Ориентирование такого сочетания автоматических систем с ШИМ регулятором и алгоритмов АПО на средства микропроцессорной техники, среди прочих задач, требует решение задачи уменьшения объемов памяти, отводимых на реализацию такого сочетания, что в конечном итоге, позволит расширить границы применимости таких регуляторов.
Опыт формирования алгоритмов АПО автоматических систем с ШИМ, позволяет сделать вывод о том, что наличие запаздывания в объекте регулирования, в первую очередь определяет объемы памяти, что иллюстрируется следующим образом.
Основой алгоритмов АПО являются анализаторы чувствительности, которые вычисляют функции чувствительности, исходя из выражения:
![]() , (1)
, (1)
где:
![]() - функция чувствительности по j-му настраиваемому параметру;
- функция чувствительности по j-му настраиваемому параметру;
![]() - величина разрыва регулирующего воздействия в k-й момент его разрыва
- величина разрыва регулирующего воздействия в k-й момент его разрыва
![]() - производные выражения, определяющие длительность k-го импульса по j-му настраиваемому параметру;
- производные выражения, определяющие длительность k-го импульса по j-му настраиваемому параметру;
![]() - оператор объекта регулирования;
- оператор объекта регулирования;
![]() - смещенная дельта-функция.
- смещенная дельта-функция.
В состав выражения (1) входит оператор объекта регулирования ![]() , который включает в себя и запаздывание, описываемое оператором вида
, который включает в себя и запаздывание, описываемое оператором вида ![]() . Компьютерное моделирование такого объекта требует использование массивов, под которые выделяются соответствующие объемы памяти. Наличие оператора
. Компьютерное моделирование такого объекта требует использование массивов, под которые выделяются соответствующие объемы памяти. Наличие оператора ![]() , как в операторе объекта регулирования, так и в анализаторах чувствительности, т. е. общее число массивов равно m+1, приводит к значительному увеличению объемов памяти.
, как в операторе объекта регулирования, так и в анализаторах чувствительности, т. е. общее число массивов равно m+1, приводит к значительному увеличению объемов памяти.
В настоящей работе исследована работоспособность алгоритмов АПО, в анализаторах чувствительности которых осуществлено эквивалентирование по переходному процессу оператора звена запаздывания. Под эквивалентированием по переходному процессу будем понимать нахождение такого оператора ![]() , переходная характеристика которого при определенных условиях с достаточной для сохранения работоспособности алгоритма АПО точностью совпадала с переходной характеристикой оператора звена запаздывания.
, переходная характеристика которого при определенных условиях с достаточной для сохранения работоспособности алгоритма АПО точностью совпадала с переходной характеристикой оператора звена запаздывания.
Оператор ![]() соответствует инерционному звену первого порядка, а само эквивалентирование звена запаздывания осуществляется последовательным соединением N таких звеньев [4]
соответствует инерционному звену первого порядка, а само эквивалентирование звена запаздывания осуществляется последовательным соединением N таких звеньев [4]
![]() , (2)
, (2)
где ![]() .
.
При этом,
![]() , (3)
, (3)
Исследование работоспособности алгоритма АПО при эквивалентировании оператора звена запаздывания проведено применительно к автоматической системе с ШИМ-регулятором, структурная схема которого представлена на рисунке:

Рис 1. Структурная схема системы с ШИМ-регулятором
Процессы в такой системе можно описать следующим образом:
 (4)
(4)
Здесь:
![]() - задающее воздействие,
- задающее воздействие,
![]() -ошибка регулирования,
-ошибка регулирования,
![]() -выходная координата автоматической системы,
-выходная координата автоматической системы,
![]() -регулирующее воздействие,
-регулирующее воздействие,
![]() - оператор объекта регулирования;
- оператор объекта регулирования;
![]() -оператор импульсного элемента,
-оператор импульсного элемента,
![]() -вектор настраиваемых параметров.
-вектор настраиваемых параметров.
Характеристику импульсного элемента, осуществляющего широтно-импульсную модуляцию можно представить:
![]() при
при ![]()
-1, при ![]()
0, при ![]() (5)
(5)
![]()
где:
![]() -период числа работы импульсного элемента,
-период числа работы импульсного элемента,
![]() -длительность
-длительность ![]() -го импульса, определяемая как
-го импульса, определяемая как
![]() , здесь
, здесь
![]() -скважность
-скважность ![]() -го импульса, определяемая исзодя из модуляционной характеристики[1]
-го импульса, определяемая исзодя из модуляционной характеристики[1]
![]() (6)
(6)
Работа алгоритма исследована при ![]() . При исходных значениях
. При исходных значениях ![]() , получены следующие результаты:
, получены следующие результаты:
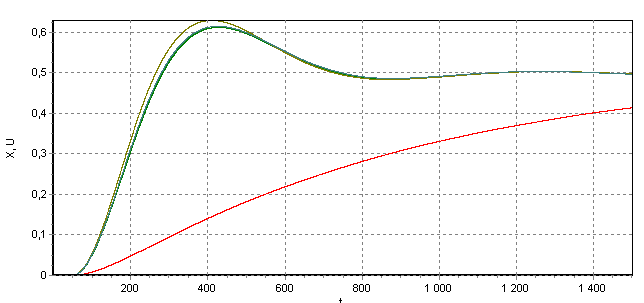
Рис. 2 Графики переходного процесса при ![]()
1 – исходный переходный процесс;
2, 4 – оптимальный переходный процесс со звеном запаздывания и квазиоптимальный переходный процесс при замене звена запаздывания 4-мя инерционными звеньями;
3 – квазиоптимальный переходный процесс при замене звена запаздывания 1-м инерционным звеном.
При ![]() получены:
получены:
![]() - значение оптимального критерия при наличии звена запаздывания;
- значение оптимального критерия при наличии звена запаздывания;
![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
![]() - значение критерия при эквивалентировании звена запаздывания одним инерционным звеном;
- значение критерия при эквивалентировании звена запаздывания одним инерционным звеном; ![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
![]()
![]() - значение критерия при эквивалентировании звена запаздывания 4-мя инерционными звеньями;
- значение критерия при эквивалентировании звена запаздывания 4-мя инерционными звеньями;![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
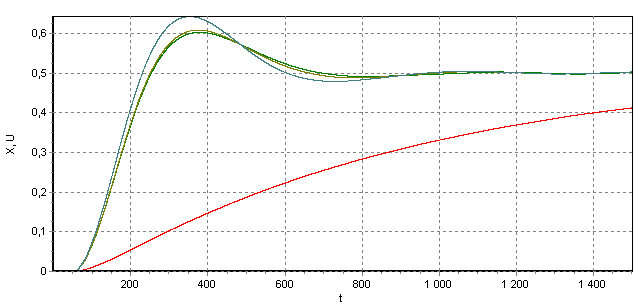
Рис. 3 Графики переходного процесса при ![]()
1 – исходный переходный процесс;
2, 3 – оптимальный переходный процесс со звеном запаздывания и квазиоптимальный переходный процесс при замене звена запаздывания 1-м инерционным звеном;
4 – квазиоптимальный переходный процесс при замене звена запаздывания 4-мя инерционными звеньями.
При ![]() получены:
получены:
![]() - значение оптимального критерия при наличии звена запаздывания;
- значение оптимального критерия при наличии звена запаздывания;
![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
![]()
![]() - значение критерия при эквивалентировании звена запаздывания одним инерционным звеном;
- значение критерия при эквивалентировании звена запаздывания одним инерционным звеном; ![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
![]() - значение критерия при эквивалентировании звена запаздывания 4-мя инерционными звеньями;
- значение критерия при эквивалентировании звена запаздывания 4-мя инерционными звеньями;![]() - соответсвующие значения вектора настраиваемых параметров.
- соответсвующие значения вектора настраиваемых параметров.
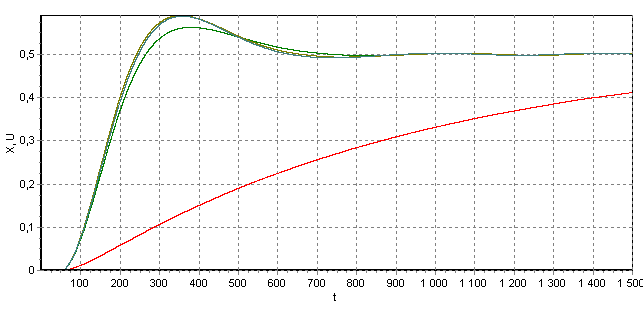
Рис. 4 Графики переходного процесса при ![]()
1 – исходный переходный процесс;
2 – оптимальный переходный процесс со звеном запаздывания;
3, 4 – квазиоптимальные переходные процессы при замене звена запаздывания 1-м и 4-мя инерционными звеньями.
При ![]() получены:
получены:
![]() - значение оптимального критерия при наличии звена запаздывания;
- значение оптимального критерия при наличии звена запаздывания; ![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
![]() - значение критерия при эквивалентировании звена запаздывания одним инерционным звеном;
- значение критерия при эквивалентировании звена запаздывания одним инерционным звеном; ![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
![]() - значение критерия при эквивалентировании звена запаздывания 4-мя инерционными звеньями;
- значение критерия при эквивалентировании звена запаздывания 4-мя инерционными звеньями; ![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
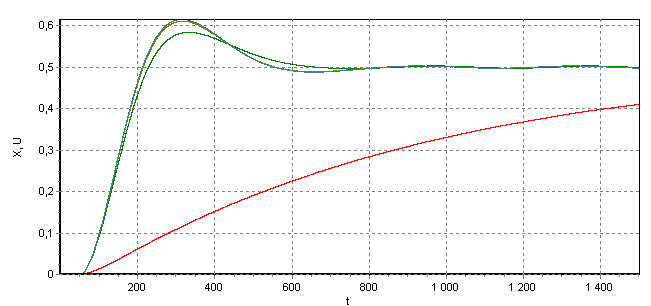
Рис 5. Графики переходного процесса при ![]()
1 – исходный переходный процесс;
2 – оптимальный переходный процесс со звеном запаздывания;
3, 4 – квазиоптимальные переходные процессы при замене звена запаздывания 1-м и 4-мя инерционными звеньями.
При ![]() получены:
получены:
![]() - значение оптимального критерия при наличии звена запаздывания;
- значение оптимального критерия при наличии звена запаздывания; ![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
![]() - значение критерия при эквивалентировании звена запаздывания одним инерционным звеном;
- значение критерия при эквивалентировании звена запаздывания одним инерционным звеном; ![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
![]() - значение критерия при эквивалентировании звена запаздывания 4-мя инерционными звеньями;
- значение критерия при эквивалентировании звена запаздывания 4-мя инерционными звеньями; ![]() - соответствующие значения вектора настраиваемых параметров.
- соответствующие значения вектора настраиваемых параметров.
Представленные результаты позволяют сделать вывод о возможности эквивалентирования звена запаздывания инерционными звеньями, что расширяет область применения автоматических систем с ШИМ.
ЛИТЕРАТУРА:
Куцый, параметрическая оптимизация дискретных систем регулирования.: диссертация доктора технических наук: 05.13.07: защищена 26.11.97: утв. 15.05.98/ - М.:1977 – 382 с. – Библиогр.: с. 359-371
Куцый, параметрическая оптимизация систем с широтно-импульсной модуляцией / «Математические методы в технике и технологиях» ММТТ – 2000.: Сб. трудов 13 международной конференции в 7- ми т. Т 2., секция 28// Санкт-петербургский государственный технологический институт – Санкт-Петербург: 2000 – с. 95-97
Городецкий, теории чувствительности в автоматическом управлении./ ., ., ., .: под ред. и – Л.: Энергия, 1971 – 344 с.
Бессекерский, систем автоматического управления/ В. А. Бессекерский, – 4-е изд., испр. и доп. – М.: Наука, 2001 – 768с.
Коган, моделирующие устройства и их применение для исследования систем автоматического регулирования. – 2 изд., испр. и доп. – М.: Физматгиз, 1963 – 512 с.
