
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.313
Омский государственный университет путей сообщения
ЧАСТОТНОЕ РЕГУЛИРОВАНИЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Статья посвящена вопросам применения широтно-импульсного модулирования напряжения для питания электродвигателей с целью получения регулирования частоты вращения.
Асинхронный двигатель, регулирование частоты вращения, преобразователи частоты, широтно-импульсное модулирование
FREQUENCY REGULATION OF ASYNCHRONOUS MOTORS
The article is about of voltage-PWM-modulation of the regulation electric motors speed. Asynchronous motor speed control, frequency converters, PWM-pulse modulation
Электродвигатели – это машины, получившие широчайшее распространение во всём своем многообразии, как в промышленности, так и в повседневной жизни: от станков и конвейеров, автоматических линий и роботизированных систем, до транспорта и бытовых устройств.
Регулирование частоты вращения электрических машин - актуальная проблема, сопровождающая электродвигатели со времен первых промышленных машин. Различные типы двигателей обуславливают различные способы регулирования: от простейших, малоэффективных до сложных. А в век электроники и цифровых технологий открываются новые возможности в этом важном и сложном вопросе.
Частота вращения электродвигателей зависит от величины питающего напряжения. Поэтому в современных методах ее регулирования изыскиваются возможности эффективного воздействия на величину питающего напряжения, а для двигателей переменного тока еще и на частоту.
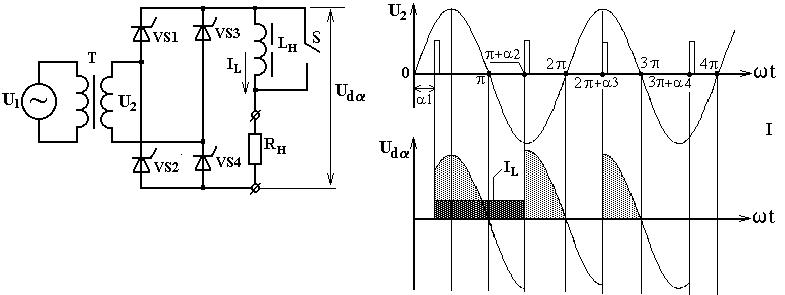
Тяговые двигатели в России до недавнего времени в основном регулировались с помощью тиристорных преобразователей. Управление осуществлялось за счёт изменения «угла управления» тиристоров с помощью коротких импульсов, подаваемых на управляющий электрод (рис. 1). К преимуществам такого способа относится простота схемы управления, недостаток – узкий диапазон регулирования напряжения.
 |
|
На смену тиристорным преобразователям пришли частотные, построенные на базе современных цифровых микропроцессоров. Транспортные машины, использующие частотные преобразователи и схемы регулирования напряжения с широтно-импульсной модуляцией (ШИМ) экономичнее расходуют электрическую энергию в сравнение с другими способами.
|
Рис. 2. Временная диаграмма напряжения при различных значениях скважности |
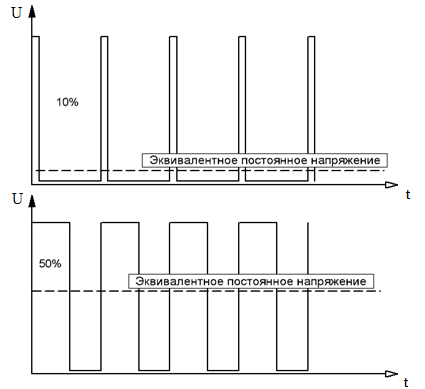
В основе ШИМ регулирования напряжения лежит изменение длительности импульсов, а иными слова, изменение скважности импульсов (рис. 2), что приводит к изменению среднего значения напряжения не за счет амплитуды сигнала, а за счет продолжительности импульсов. Управление скважностью импульсов в такого рода ШИМ производится, в основном, с помощью микропроцессорных модулей, которые обеспечивают периодически меняющееся значение скважности в течение одного периода. Формы импульсов на выходе ШИМ - регуляторов могут быть различными, что позволяет подстраиваться под особенности эксплуатируемого двигателя.
Основным элементов преобразователя являются мощные биполярные или полевые транзисторы, работающие в ключевом режиме: в таком режиме они могут находиться в двух состояниях: открытом и закрытом. Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления (рис. 3).
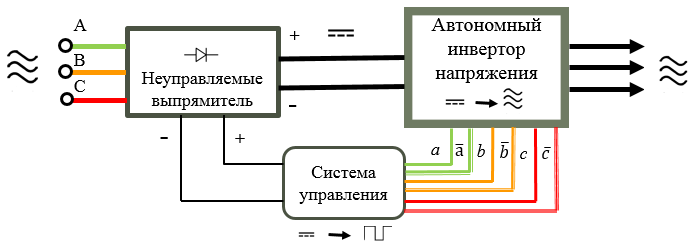
Рис. 3. Структурная схема преобразователя частоты
Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей (рис. 4). Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя.
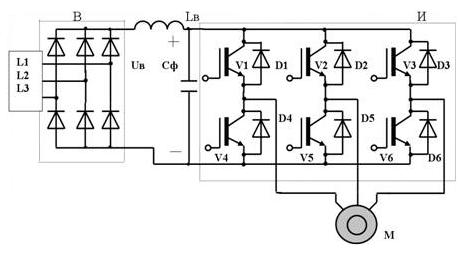
Рис. 4. Электирческая схема простейшего преобразователя частоты
Система управления регулирует порядок отпирания транзисторных ключей, в результате чего получают высокочастотную двухполярную последовательность прямоугольных импульсов на выходе преобразователя. Через регулирование частоты сигналов управления, можно осуществлять регулирование частоты выходного напряжения инвертора. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.
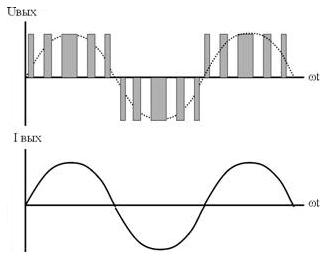
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы или транзисторы с изолированным затвором. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет на дорогих моделях вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями (рис. 5). В этом случае с помощью микропроцессорного управления осуществляется сложное регулирование длительности импульса, с акцентирование на момент пика синусоиды и уменьшением длительности, по мере снижения модулируемого напряжения.
|
Рис. 5. Временная диаграмма напряжения и тока на выходе преобразователя при ШИМ модуляции синусоидального сигнала |
Достоинством таких схем можно считать эффективность: КПД лежит в пределах от 90 до 97 процентов, так как схема преобразует напряжение, а не ограничивает его; плавность регулирования частоты вращения и широкий диапазон регулирования, при правильной подборке схемы к эксплуатируемой машине. В качестве недостатков следует упомянуть сравнительную сложность конструкции, по отношению к тиристорной схеме и критичность к питающему напряжению.
Таким образом, преобразователи частоты выводят асинхронные машины на один уровень по доступности и рентабельности с машинами постоянного тока, в частности на железнодорожном транспорте. При том, что ресурс и надёжности, в совокупности с относительной дешевизной асинхронных машин выше, чем у машин постоянного тока.
|
Рис. 6. Схема исследуемого ШИМ регулятора частоты вращения электрического двигателя |

Автором в рамках научной работы было проведено испытание схемы ШИМ - регулирования частоты вращения (рис. 6). Управление осуществляется изменением сопротивления R1, входящего в RC – цепочку вместе с конденсатором С1. В качестве испытуемой машины был выбран распространенный электродвигатель серии RF – 310, применяемый в системах автоматизации и компьютерной периферии, с номинальным напряжение Uн = 5,9 В. Индуктор машины выполнен виде постоянного магнита и закреплен жестко внутри корпуса. Питание схемы при испытаниях осуществлялось от лабораторного блока питания через гальваническую развязку.
В ходе проведенных испытаний было зафиксировано на выходе схемы ШИМ-управления, т. е. на вводах электродвигателя, что изменение напряжения регулятором позволяет влияет на частоту вращения двигателя, были получены следующие осциллограммы (рис. 7):
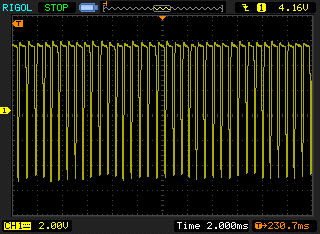
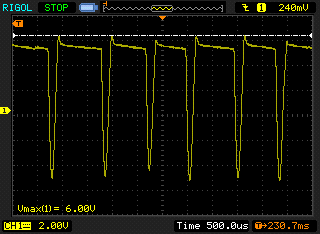
Рис. 7 – Осциллограмма напряжения на выводах электродвигателя
при скважности 70%
Было также зафиксировано, что со схемы поступает напряжение импульсного характера, а благодаря индуктивности обмотки ротора, помещенной на сердечник, форма импульса искажается, приобретая акцентированную высшую гармонику. Дальнейшие исследования будет направлены на осуществление оценки влияния этих высших гармоник на плавность регулирования частоты вращения двигателя, управляемого ШИМ-регулятором.
