

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Свободная творческая категория.
Автоматизированный портальный кран для морских судов
Руководитель: Оператор №1: Дацюк Никита Оператор №2: Купреева Екатерина Оператор №3: Липский Андрей | Команда “ЧЕРНОМОРЦЫ” ЧОУ “Гимназия №1”, г. Новороссийск |


Идея проекта - конструирование портального крана, который осуществляет выгрузку и погрузку контейнеров с морского судна на автомобильный транспорт из деталей LEGO WeDo.
Цель проекта - построить модель, которая поднимает груз (контейнер)
и перемещает его в двух направлениях горизонтальной плоскости.
Этапы работы над проектом
В начале нашей работы над проектом, мы с нашим руководителем побывали в Новороссийском Морском торговом порту. Порт в нашем городе является одним из крупных предприятий. Мы узнали, что порт обрабатывает разные виды грузов: зерно, уголь, металл, цемент, фрукты, овощи, промышленное оборудование, сахар-сырец. Нам объяснили, что для обработки такого большого количества грузов необходимо много видов специализированной техники: портальные и мобильные краны, вилочные, ковшовые погрузчики, тягачи, судопогрузочные машины.
Нам показали суда разных типов: балкер, сухогруз, танкер. Подробно нам рассказали о выгрузке и погрузке контейнеровоза. В момент нашей экскурсии у причала был ошвартован самый большой контейнеровоз, который может принять наш порт.
Из рассказа начальника управления контейнерных перевозок Жогло Михаила Константиновича мы узнали, что дальнейший прогресс развития порта связан с увеличением объемов контейнерных перевозок.
Контейнер – универсальный способ транспортировки. Оказывается, этот вид перевозок позволяет транспортировать любые виды грузов, не применяя специальных видов техники для каждого. Все контейнеры имеют одинаковый размер и единый способ погрузки, выгрузки и транспортировки. Стандартный контейнер может быть обработан в любом порту земного шара.
Экскурсия в порт - подсказала нам идею будущего проекта -
создание автоматизированного портального крана для морских судов.
На занятиях по робототехнике мы уже создавалимобильный кран и вилочный колесный погрузчик. Мы решили, что можем еще раз их построить, чтобы продемонстрировать процесс погрузки, который увидели в порту.
Мы собрали дополнительные модели конструкции: вилочный погрузчик и грузоподъемный кран. Исследовали ременную передачу, работу датчика наклона, червячную зубчатую передачу и работу рукоятки. Исследовали условия равновесия, изменение положения тела, влияние силы на движение тела. Написали программы и протестировали. После исследования собранных моделей изучили информацию в интернете и узнали, что по типу подъемный кран бывает поворотным и неповоротным, мобильным и стационарным.


В результате проведенного исследования решили создать конструкцию портального крана, который осуществляет выгрузку и погрузку контейнеров с морского судна на автомобильный транспорт.
Построили четыре опоры будущего крана; после этого сконструировали верхнюю часть; укрепили опоры поперечными балками для придания конструкции устойчивости. Затем приступили к самому сложному этапу - моделированию каретки с подъемным механизмом. Конструированию каретки мы посвятили несколько занятий: каретка должна двигаться по горизонтальной плоскости автоматически. После нескольких попыток это нам удалось.


Для того чтобы разобраться с креплением троса на катушки, мы обратились за консультативной помощью к учителю физики Виктору Васильевичу.
Следующий этап – решение задачи движения конструкции крана вдоль причала. Модель крана установили на колесные пары, разместили на рельсах. На нижнюю балку закрепили мотор и соединили его с обрезиненным колесом.
Провели эксперименты с колёсами, подобрали оптимальное по диаметру колесо. Для управления движением собрали пульт с датчиком наклона. Датчик установили на большой кирпич с колёсами. Написали программы управления конструкцией. Робот управляется с клавиатуры, все программы запускаются буквенными кнопками. Научились управлять несколькими двигателями одновременно. Протестировали и отладили программы.
УРА! Контейнерный терминал готов к демонстрации!!!


Последний этап - все вместе сочинили стихи, написали текст для защиты проекта и выучили слова. Репетировали и записывали видеоролики. Представили проект родителям, учителям и Жогло Константину Михайловичу.
Программа выглядит следующим образом:
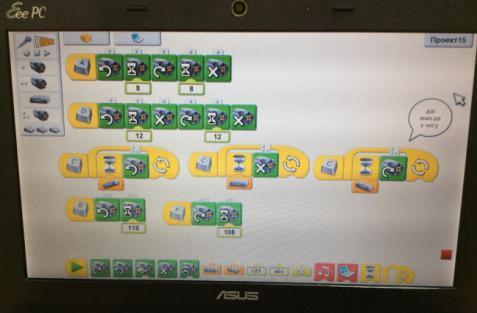
Принцип действия модели портального крана
Наша модель использует 3 электродвигателя и 3 коммутатора.
Кран установлен на четырех опорах. Движение всей модели вдоль причала осуществляется по рельсам на четырёх колесных парах за счет вращения обрезиненного колеса, которое соединено с электродвигателем осью. Запуск движения и остановка двигателя производится за счет датчика наклона, который установлен на стойке и работает как переключатель скорости электродвигателя. В верхней части модели расположена каретка на обрезиненных колесах. Для её перемещения в горизонтальной плоскости используется электродвигатель, который вращает малый шкив, соединенный ремнем с большим шкивом. С двух сторон конструкции на верхней панели расположены три катушки: со стороны судна одна катушка, со стороны причала две катушки. Они объединены осью с большим шкивом. На катушки наматывается трос и двигает каретку из стороны в сторону.
Подъем груза осуществляется элетродвигателем, на котором осью закреплена катушка с захватывающим магнитным устройством.
