

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ДВУМЕРНАЯ МОДЕЛЬ ДВИЖЕНИЯ ГРАНУЛИРОВАННОЙ СРЕДЫ, ОСНОВАННАЯ НА МЕТОДЕ КЛЕТОЧНЫХ АВТОМАТОВ
Основана на работе LaMarche K. R., Conway S. L., Glasser B. J., Shinbrot T. Cellular automata model of gravity-driven granular flows, Granular Matter, DOI 10.1007/s10035-006-0028-9
Клеточный автомат состоит из набора объектов (ячеек), обычно образующих регулярную решетку. Состояние отдельно взятого i-го объекта (или ячейки) в момент времени n характеризуется некоторой переменной, которая может быть целым, действительным или комплексным числом, либо представлять собой набор из нескольких чисел. Рассматриваемые состояния ячеек изменяются синхронным образом через дискретные интервалы времени в соответствии с локальными вероятностными правилами, которые могут зависеть от состояния переменных в ближайших соседних узлах. Эти правила не меняются со временем.
В нашем случае для моделирования движения оползня будем использовать такие правила:
Сравнивается высота каждой клетки с окрестностью. Находится клетка с наименьшей высотой, куда и переместится гранула. Если имеются 2 точки с одинаковой высотой, то выбирается одна точка наугад. С перемещаемой клетки отнимается высота перемещаемой гранулы. В перемещаемую клетку эта высота прибавляется.![]()
![]() если
если ![]()
![]() или
или
![]()
![]() если
если ![]()
![]()
где Zi, j – высота точки, ![]()
![]() – градиент.
– градиент.
При этом входным вектором является вектор высот исходного положения оползнеопасного участка. На выходе мы получаем новый вектор высот уже перемещенного оползня.
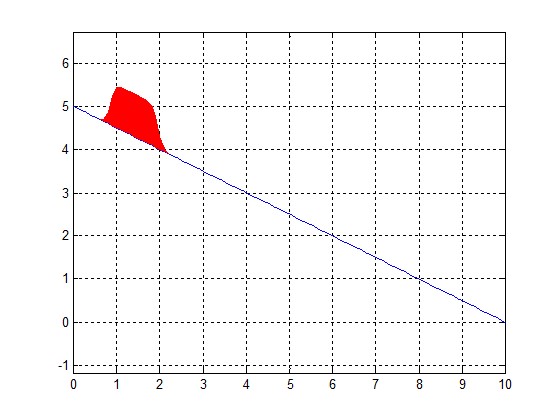
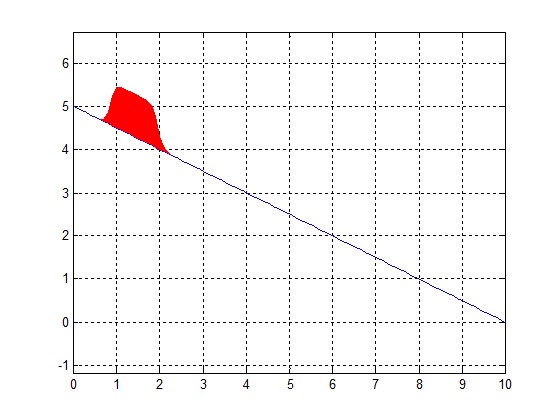
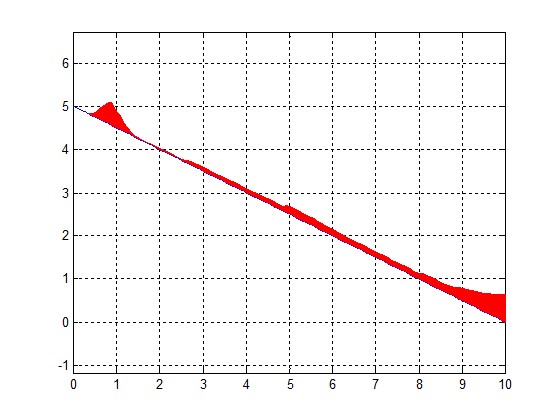
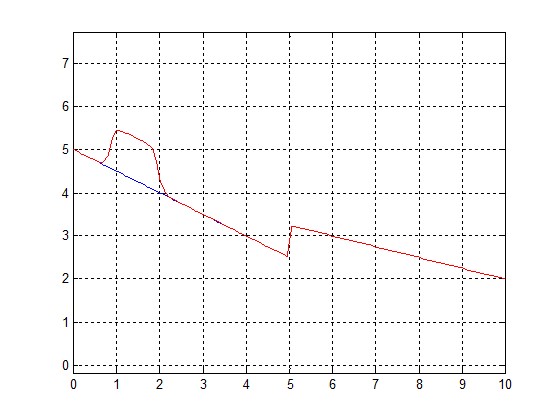
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=15
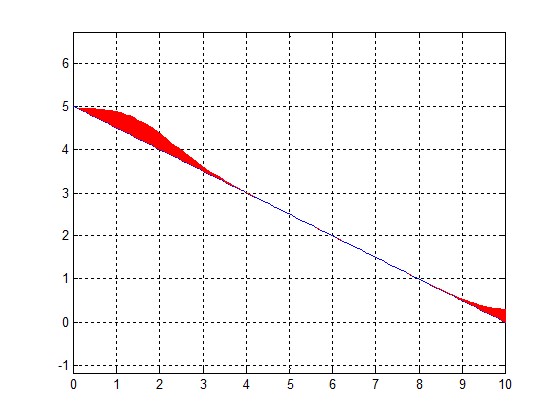
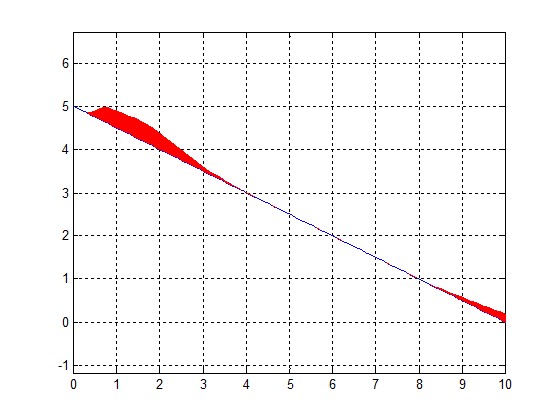
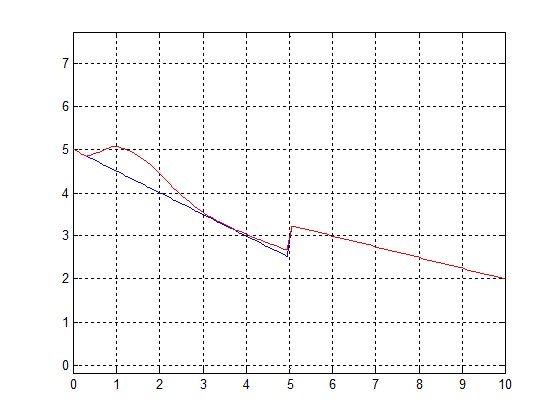
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=250
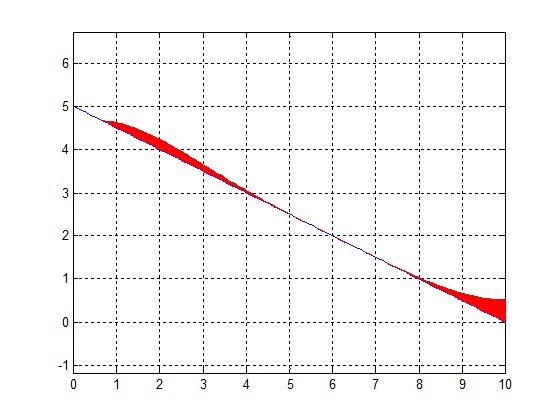
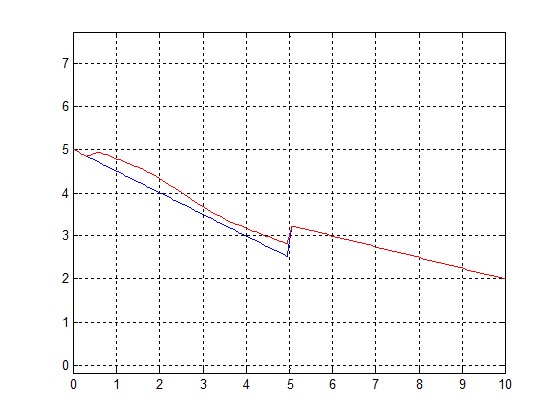
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=2500
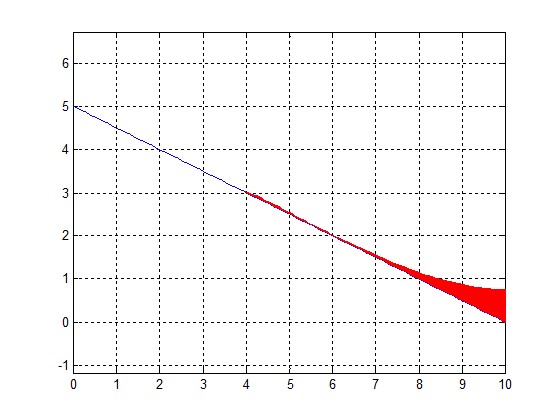
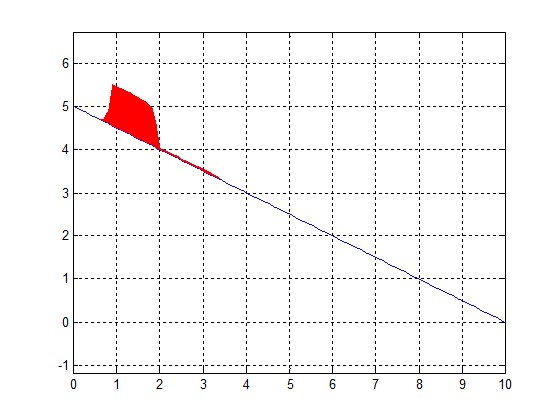
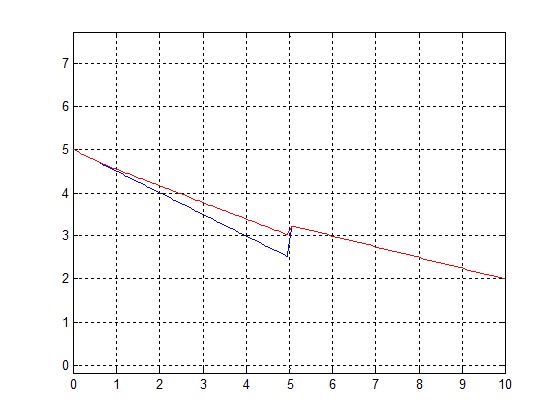
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=5000
В данном примере оползень ведет себя как жидкость. Поэтому необходимо вводить другие параметры, которые бы превратили оползень в гранулированную среду. Такими параметрами являются угол покоя и вязкость.
Под углом покоя понимается величина, при превышении которой возможен оползневый процесс.
Вязкость — свойство текучих тел оказывать сопротивление перемещению одной их части относительно другой.
Новые правила, которые добавляются в модель клеточных автоматов, выглядят следующим образом:
Если градиент превышает угол покоя, то гранула перемещается из одной точки в другую, если нет – остаётся на месте.![]()
![]()
![]()
![]() ,
,
где ![]()
![]() – коэффициент вязкости.
– коэффициент вязкости.
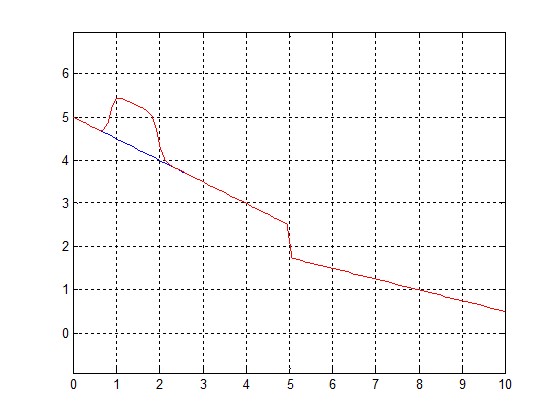
Если вязкость будет равна 0,8, то модель будет выглядеть следующим образом:
Моделирование движения оползня, введя коэфициент вязкости и угол покоя на шаге t=15

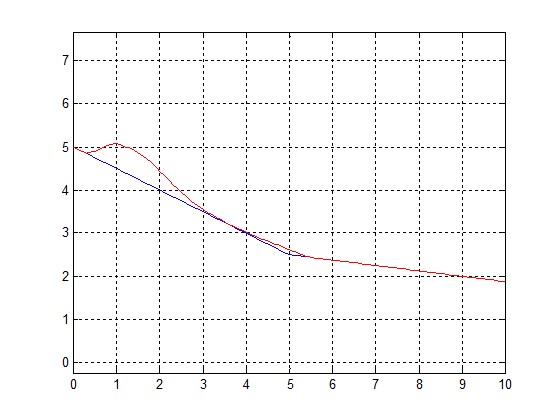
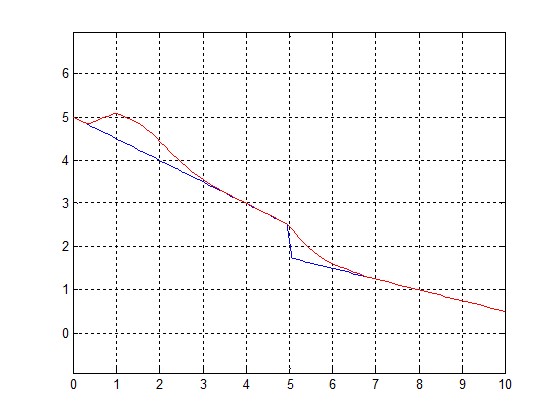
Моделирование движения оползня, введя коэфициент вязкости и угол покоя на шаге t=500
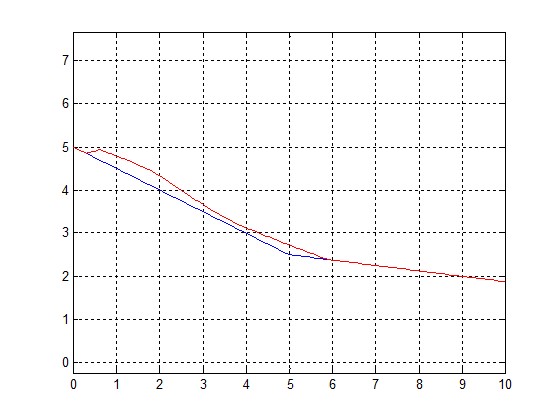
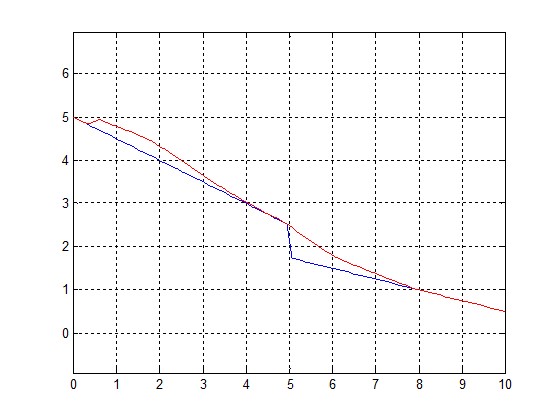
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=1000
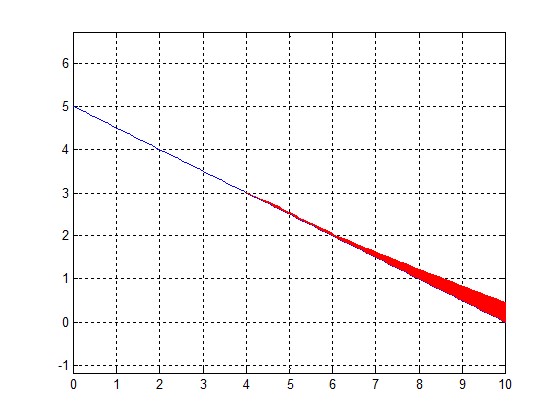
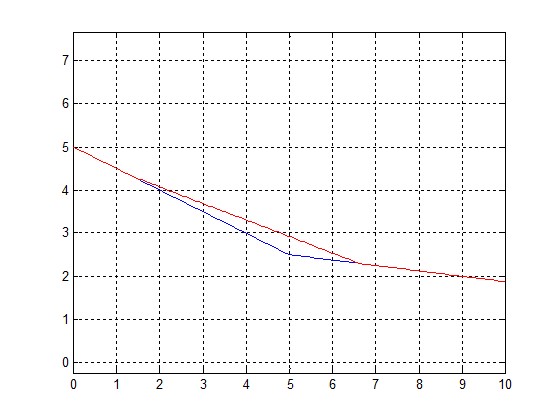
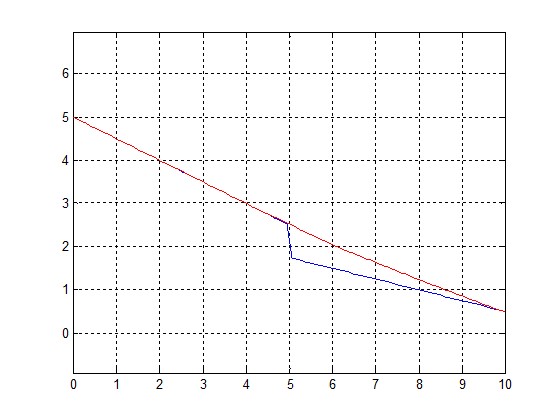
Рис. 9 Моделирование движения оползня, используя простейшие правила моделирования на шаге t=5000
При введении вязкости, соответствующей грунту, и угла покоя гранулированная среда повела себя как «куча песка».
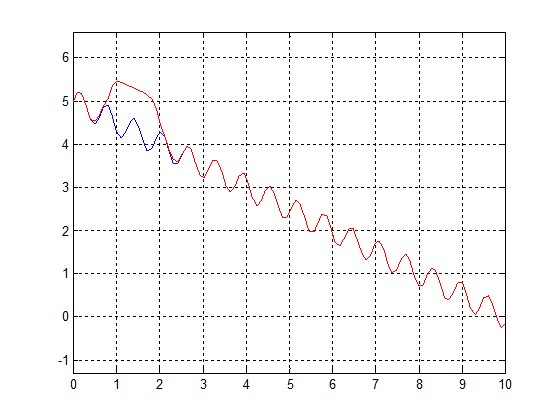
Если вязкость будет равна 0,015 (вязкость воды), то модель будет выглядеть следующим образом:
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=15
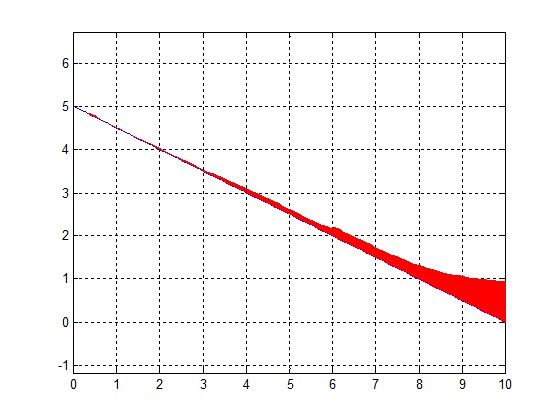
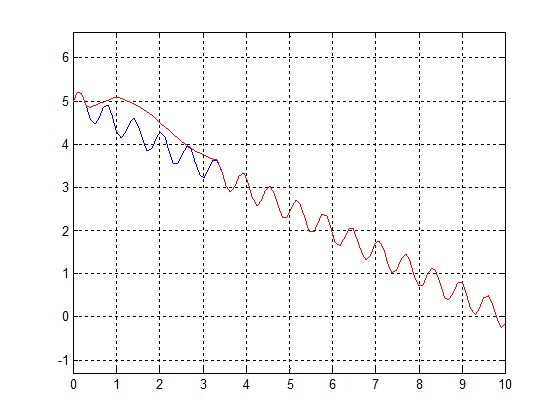
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=250
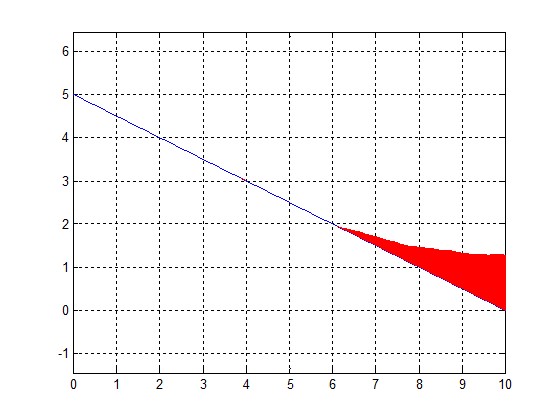
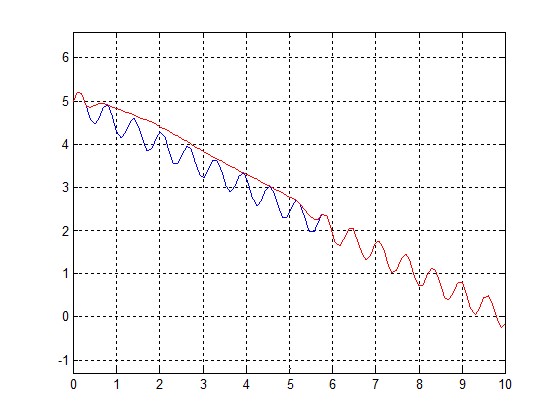
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=500
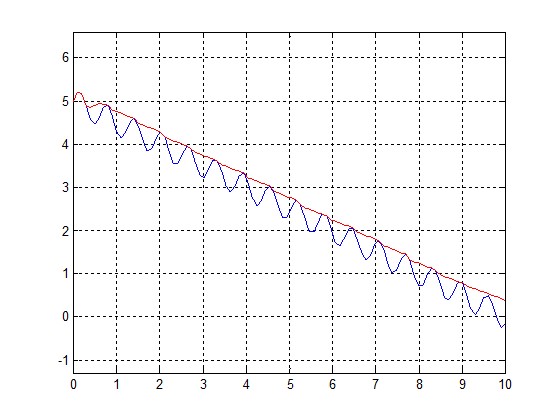
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=1000
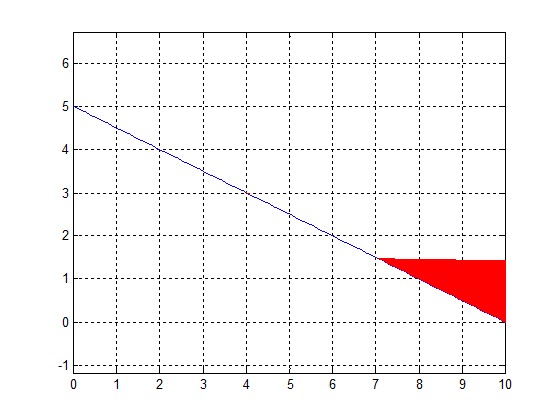
Моделирование движения оползня, используя простейшие правила моделирования на шаге t=5000
Как видим, в последнем случае оползень действительно ведет себя как вода.
Проверим работу модели при разных видах подстилающей поверхности:
склон с участками разного склона: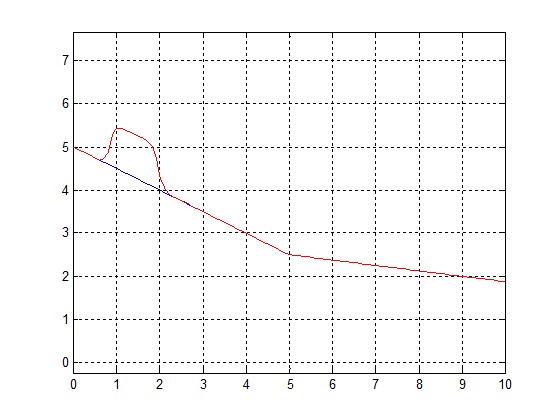
Моделирование движения оползня на шаге t=15
Моделирование движения оползня на шаге t=500
Моделирование движения оползня на шаге t=1500
Моделирование движения оползня на шаге t=5000
склон со стенкой:
Моделирование движения оползня на шаге t=5000
Моделирование движения оползня на шаге t=5000
Моделирование движения оползня на шаге t=5000
Моделирование движения оползня на шаге t=5000
склон с обрывом:
Моделирование движения оползня на шаге t=15
Моделирование движения оползня на шаге t=500
Моделирование движения оползня на шаге t=1500
Моделирование движения оползня на шаге t=6000
склон с синусоидальным рельефом:
Моделирование движения оползня на шаге t=15
Моделирование движения оползня на шаге t=500
Моделирование движения оползня на шаге t=1500
Моделирование движения оползня на шаге t=6000
