
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
10 ПЛАВНОСТЬ ХОДА АВТОМОБИЛЯ
Колебания кузова автомобиля способствуют утомляемости водителя и пассажиров, а также влияют на сохранность перевозимого груза и самого автомобиля. Поэтому одним из важнейших требований, которые предъявляются к автомобилю, является плавность хода и комфортабельность.
Автомобиль подвержен низкочастотным (до 15…17 Гц) и высокочастотным колебаниям (вибрация). Высокочастотным колебаниям подвержены в основном неподрессорные массы, а низкочастотным – подрессорные массы (несущая система). Неподрессорными массами называют элементы автомобиля, вес которых не воспринимается подвеской (мосты, колеса и др.) Подрессорными массами называют элементы автомобиля, вес которых передается через упругие элементы подвески.
Организм человека нормально воспринимает колебания, частота которых соответствует частоте колебаний при ходьбе (1,7…2.5 Гц).
Чем выше частота колебаний, тем хуже плавность хода автомобиля.
1 Измерители плавности хода автомобиля
На рис. 10.1, а представлена схема колебаний тела весом GГ с одной степенью свободы, расположенного на пружине, имеющей жесткость С. В свободном состоянии пружины тело занимает положение I. При равновесии системы возникает статическая деформация пружины под действием веса GГ, вследствие этого тело занимает положение II, при этом деформация (прогиб) пружины определяется по следующей формуле
fо = ![]() . (10.1)
. (10.1)
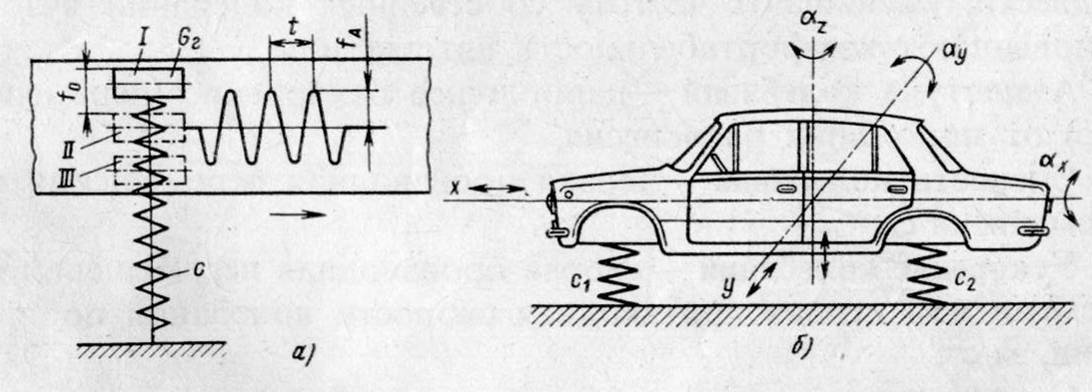
Рисунок 10.1 - Схемы колебаний тела с одной степенью свободы и
колебательной системы автомобиля
Переместим тело в положение III, сжав пружину, а затем отпустим ее. Тело начнет совершать колебательные движения, перемещаясь вверх и вниз. Если колебания тела зафиксировать самопишущим прибором, то можно получить запись кривой колебаний тела. На данной кривой отметим амплитуду fа, равную наибольшему колебанию тела относительно его равновесного состояния, и период t, равный промежутку времени, который соответствует двум ближайшим одинаковым положениям тела (например, крайним верхним).
При колебаниях тело движется неравномерно, при этом одновременно изменяются его положение, скорость, ускорение и нарастание ускорений. Характер кривых перемещений, скорости и ускорения примерно одинаков.
Для характеристики колебаний кузова автомобиля существует семь измерителей, которые приведены ниже.
Период колебаний t – время, в течение которого кузов совершает одно полное колебание, с.
Угловая частота Щ - величина, которая определяется произведением частоты колебаний на 2р; Щ = 2р ∙ н = 2р/t. На практике частоту колебаний измеряют числом колебаний в минуту: n = 60/t.
Частоты Щ и n связаны зависимостью
n =  , (10.2)
, (10.2)
где m – масса колеблющегося тела, кг.
Подставив в выражение (10.2) значение жесткости из формулы (10.1), а также выразив массу m через GГ/g, получим
n =  . (10.3)
. (10.3)
Из выражения (10.3) следует, что чем больше статический прогиб подвески, тем меньше частота собственных колебаний. Для уменьшения частоты собственных колебаний кузова и повышения комфортабельности автомобиля используют мягкие подвески.
Амплитуда колебаний – наибольшее отклонение (перемещение) от положения равновесия.
Скорость колебаний – первая производная перемещения по времени, м/с.
Ускорение колебаний – первая производная скорости колебаний по времени или вторая производная перемещения по времени, м/с2.
Среднее квадратическое ускорение колебаний уск, м/с2.
Скорость нарастания ускорений колебаний – третья производная перемещений по времени или первая производная ускорения колебаний по времени, м/с3.
2 Колебания автомобиля
Кузов автомобиля имеет шесть степеней свободы (рис. 10.2, б) и может совершать шесть различных колебаний. Линейные перемещения вдоль осей х, у и z и угловые перемещения вокруг этих же осей. Перемещения кузова автомобиля относительно этих осей имеют следующие названия:
вдоль оси х – подергивание (Sх);
вдоль оси у – шатание (Sу);
вдоль оси z – подпрыгивание (Sz);
вокруг оси х – покачивание (бх);
вокруг оси у – галопирование(бх);
вокруг оси z – виляние (бх).
Так как исследовать систему с шестью степенями свободы довольно сложно, при расчете подвески изучают только два типа колебаний, т. е. рассматривают кузов как систему с двумя степенями свободы: линейные вдоль оси z и угловые вокруг оси y. Эти типы колебаний имеют наибольшее влияние на комфортабельность автомобиля, так как они вызывают в организме человека наиболее болезненные ощущения.
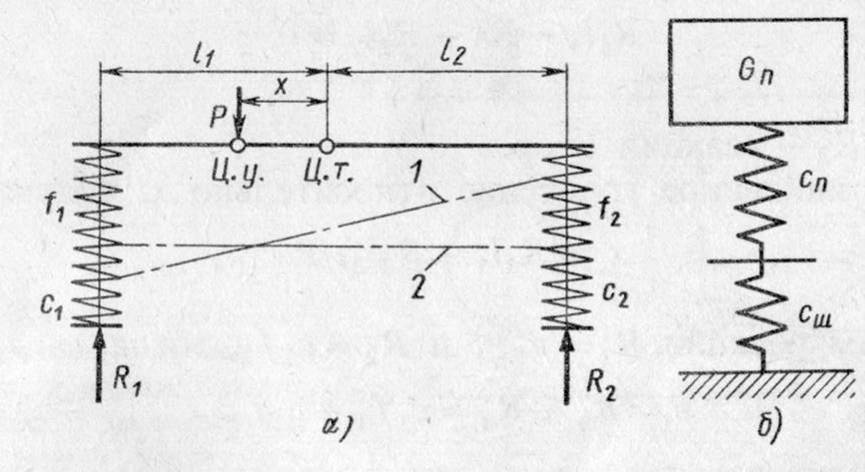
Рисунок 10.2 - Схемы для определения положения центра упругости и
приведенной жесткости
Буквами С1 и С2 на схеме обозначены приведенные жесткости упругих элементов, прогиб которых равен суммарным прогибам подвесок и шин, воспринимающих одинаковую нагрузку. Чтобы определить приведенную жесткость Спр рассмотрим пример на рис. 10.2,б, на котором изображен груз весом Gп, установленный на упругом элементе подвески и шине, жесткости которых соответственно равны Сп и Сш.
Вес Gп, действуя на упругую систему, деформирует ее. Величина деформации при этом равна сумме прогибов упругого элемента подвески и шины: fп= Gп / Сп + Gп / Сш. Вместе с тем суммарный прогиб этой системы определяют по изменению положения оси колеса fп= Gп / Спр, т. е.
Gп / Спр = Gп / Сп + Gп / Сш. (10.4)
Решив уравнение (10.4) относительно жесткости Спр, получим
Спр = (Сп ∙Сш)∙( Сп + Сш ) . (10.5)
Значения жесткости передней и задней подвесок у современных автомобилей составляют 20…60 кН/м, а жесткости шин - 200…450 кН/м. Меньшие значения относятся к легковым автомобилям, а большие – к грузовым автомобилям.
Чтобы смягчить вертикальные колебания Sz применяют мягкую подвеску, которая значительно деформируется при переезде через препятствие. Однако после переезда через препятствие колебания кузова при наличии мягкой подвески будут продолжаться, очень медленно затухая. Для гашения начавшихся колебаний устанавливают амортизаторы.
Чтобы иметь представление о том, каким образом можно уменьшить галопирование автомобиля, вводится понятие центра упругости системы. Точка, при приложении к которой внешней возмущающей силы, возникает только линейное колебание системы, называется центром упругости системы. Для определения положения центра упругости системы рассмотрим стержень, который опирается на упругие элементы подвески (рис. 10.2,а).
Если возмущающая сила Р приложена не к центру упругости (ц. у.) , а в другой точке, то возникает как линейное, так и угловое перемещение стержня (положение 1). Если сила Р приложена к центру упругости, то происходит только линейное перемещение стержня (положение 2), причем f1 = f2, поэтому галопирование отсутствует.
Определим расстояние от центра упругости до центра тяжести (ц. т.), которое обозначим буквой х. Из условия равновесия стержня относительно центра тяжести, имеем
R1 ∙ l1 – P ∙ x – R2 ∙ l2 = 0, (10.6)
где R1 и R2 – реакции опор, Н.
Решив уравнение (10.6) относительно величины х, получим
x = ![]() . (10.7)
. (10.7)
Заменим реакции R1 =с1 ∙ f1 и R2 =с2 ∙ f2 , тогда
Р = R1 + R2 = с1 ∙ f1 + с2 ∙ f2 .
Подставив в уравнение (10.7) значения R1 , R2 и Р, получим
х =  . (10.8)
. (10.8)
С учетом того, что f1 = f2, выражение (10.8) примет следующий вид
х =  . (10.9)
. (10.9)
Применим полученное выражение к колебаниям кузова, заменив подрессорную массу кузова mк тремя массами: m1, m2 и m3 , связанными между собой невесомым стержнем (рис. 10.3, б).
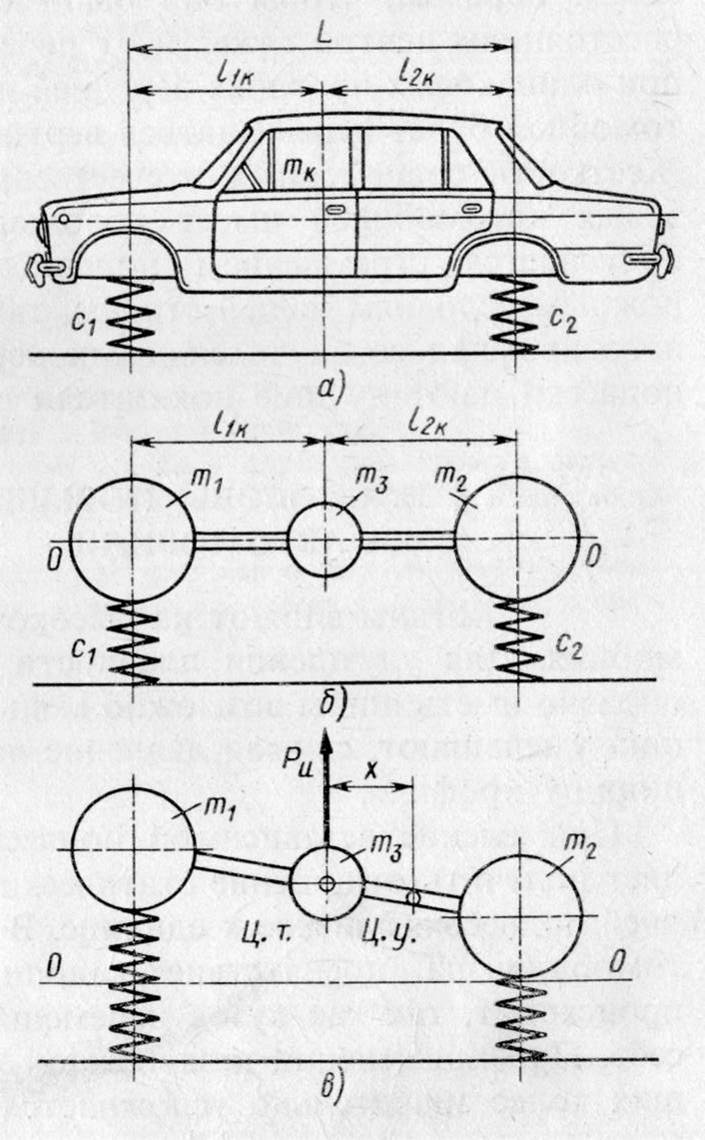
Рисунок 10.3 - Схема расчета свободных колебаний кузова
Массы m1, m2 расположены соотвественно на расстоянии l1к и l2к от центра тяжести кузова, а масса m3 находится в его центре тяжести. Чтобы система из трех масс соответствовала в динамическом отношении действительной массе подрессоренной части автомобиля, необходимо выполнить следующие условия:
сумма всех масс системы должна быть равна подрессоренной массе автомобиля m1 + m2 + m3 = mк ;
центр тяжести системы должен совпадать с центром тяжести кузова m1 ∙l1к = m2 ∙ l2к ;
момент инерции системы относительно горизонтальной оси у должен быть равен моменту инерции подрессоренной массы относительно той же оси m1 ∙l21к + m2 ∙ l22к = J = mк ∙ с2к, где ск - радиус инерции подрессоренной массы автомобиля.
Из этих условий определим массы m1, m2, m3:
m1 =  ; m2 =
; m2 =  ; m3 =
; m3 =  . (10.10)
. (10.10)
Если вывести стержень из состояния равновесия, а затем отпустить, то он начнет колебаться (рис. 10.3 в). Во время колебаний стержня появится сила инерции Ри = m3 ∙ а.
Эта сила создает момент относительно центра упругости
Ми = Ри ∙ х = m3 ∙ а ∙ х. (10.11)
Если масса m3 = 0 или плечо силы Ри равно нулю, то момент Ми = 0.
Из уравнения (10.10) следует, что масса m3 = 0, если с2к / (l1к ∙ l2к) = 1, так как масса кузова mк ≠ 0. Для легковых автомобилей отношение с2 / (l1к ∙ l2к) близко к единице, вследствие этого они имеют хорошую плавность хода. При условии х=0 и центр тяжести совпадает с центром упругости, справедливо следующее выражение
х =  = 0 ,
= 0 ,
но тогда
с1 ∙ l1к = с2 ∙ l2к или с1 / с2 = l2к / l1к.
Следовательно, жесткости подвесок необходимо выбирать таким образом, чтобы они были обратно пропорциональны расстояниям от центра тяжести до передней и задней осей. Тогда при одинаковых прогибах передней и задней подвесок кузов автомобиля будет перемещаться вертикально без галопирования. При независимой передней подвески отношение статических прогибов передней и задней подвесок примерно равно единице, и при наезде автомобиля на препятствие галопирования практически нет.
