

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МПС РОССИИ
Государственное образовательное учреждение
высшего профессионального образования
«Ростовский государственный университет путей сообщения
Министерства путей сообщения Российской Федерации»
(РГУПС)
, ,
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ЛАБОРАТОРНЫМ РАБОТАМ
ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
РАЗДЕЛ ДИНАМИКА
Ростов-на-Дону
2002

УДК 534.014
, ,
Методические указания к лабораторным работам по теоретической механике. Раздел динамика. – Ростов н/Д: Рост. гос. ун-т путей сообщения, 2002. – 20 с.
Методические указания разработаны к лабораторным работам по теоретической механике, в которых с помощью персонального компьютера решаются некоторые динамические задачи. При решении задач рекомендуется применять различные общие теоремы динамики.
В методических указаниях излагается краткая теория, необходимая для решения задач. Сформулированы условия двух задач. Приведены различные варианты этих условий и пример решения задач в одном из вариантов.
В заключении перечислены вопросы, знание которых необходимо при защите лабораторной работы.
Табл. 2. Ил. 6. Библиогр.: 7 назв.
Рецензент д-р физ.-мат. наук, проф. (РГСУ)
Методические указания к лабораторным работам по теоретической механике.
Раздел динамика
Редактор
Технический редактор и корректор
Подписано в печать 27.12.2002. Формат 60х84/16.
Бумага офсетная. Ризография. Усл. печ. л. 1,16.
Уч.-изд. л. 1,11. Тираж 60 экз. Изд. № 000. Заказ № 000.
Ростовский государственный университет путей сообщения.
Ризография АСУ РГУПС.
Адрес университета: 344038, г. Ростов н/Д, пл. Народного ополчения, 2
© Ростовский государственный университет путей сообщения, 2002

Содержание
Лабораторная работа Д4(1) 3
1.Применение теоремы о движении центра масс механической системы к решению задач динамики 3
1.1. Краткие сведения из теори 3и
1.2. Условие задач 4
1.3. Задания к лабораторной рабо 5те
1.4. Порядок выполнения работ 5
1.5. Пример решени 6я
1.6. Контрольные вопрос 8ы
Лабораторная работа Д4(2) 9
2. Примение теоремы об изменении кинетического момента механической системы к решению задач динами 9ки
2.1. Краткие сведения из теор 9ии
2.2. Условие задач 10и
2.3. Задания к лабораторной рабо 11те
2.4. Пример решения задач 13и
2.5. Контрольные вопрос 17ы
Рекомендуемая литература 18

Лабораторная работа Д4(1)
1.ПРИМЕНЕНИЕ ТЕОРЕМЫ О ДВИЖЕНИИ ЦЕНТРА МАСС МЕХАНИЧЕСКОЙ СИСТЕМЫ К РЕШЕНИЮ ЗАДАЧ ДИНАМИКИ
1.1. Краткие сведения из теории
Определение: Механической системой называется совокупность материальных точек (или тел), положение и движение каждой из которых зависит от положения и движения остальных точек (или тел) данной совокупности.
Определение: Массой механической системы называется скалярная величина, равная арифметической сумме масс всех материальных точек (или тел), входящих в механическую систему.

Определение: Центром масс механической системы называется точка пространства, положение которой определяется выражением:
Если положение элементов механической системы определено относительно пространственной прямоугольной декартовой системы координат, то координаты её центра масс в этой системе определяются выражениями:

Определение: Внутренними F i силами называются силы, с которыми материальные точки (или тела), входящие в механическую систему, взаимодействуют между собой.
Определение: Внешними F e силами называются силы, с которыми материальные точки (или тела), входящие в механическую систему, взаимодействуют с материальными точками (или телами), не входящими в механическую систему.
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС МЕХАНИЧЕСКОЙ СИСТЕМЫ
При движении механической системы в любой момент времени произведение её массы на вектор ускорения её центра масс равно векторной сумме всех внешних сил, приложенных к данной механической системе:
 .
.
Следствие из теоремы о движении центра масс механической системы:

Если положение элементов механической системы определено относительно пространственной прямоугольной декартовой системы координат, то при движении механической системы в любой момент времени произведение её массы на вторую производную по времени от каждой координаты её центра масс равно алгебраической сумме проекций (на соответствующую ось) всех внешних сил, приложенных к данной механической системе.
ЗАКОН СОХРАНЕНИЯ ДВИЖЕНИЯ ЦЕНТРА МАСС МЕХАНИЧЕСКОЙ СИСТЕМЫ
Если при движении механической системы векторная сумма всех внешних сил, приложенных к ней, равна нулю, то центр масс этой механической системы будет двигаться с постоянной (по величине и направлению) скоростью.
Следствие из закона сохранения движения центра масс механической системы:
Если при движении механической системы алгебраическая сумма проекций (на любую координатную ось) всех внешних сил, к ней приложенных, равна нулю, то проекция вектора скорости центра масс движущейся механической системы на эту координатную ось будет равна нулю.
1.2. Условие задачи
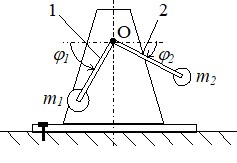
Рис. 1. Механизм
Механизм состоит из двух электромоторов. Масса механизма равна m. Оси обоих электромоторов проходят по одной прямой, проходящей через точку O. К оси каждого электромотора прикреплены на невесомых стержнях 1 и 2 длиной l1 и l2 точечные грузы с массами m1 и m2. Стержни равномерно вращаются (в разные стороны) с угловыми скоростями ω1 и ω2.
Механизм закреплен к фундаменту болтом (шарнирная связь).
Определить:
1. Закон изменения горизонтальной проекции усилия, действующего на болт при работе механизма.
2. Критические значения угловых скоростей электромоторов, при которых незакрепленный механизм будет подпрыгивать на фундаменте (для случаев, когда работает лишь один из электромоторов).
3. Уравнение движения механизма по гладкому горизонтальному фундаменту в случае снятия крепления.
1.3. Задания к лабораторной работе
Таблица 1
№ | m | m1 | m2 | l1 | l2 | ω1 | ω2 |
0 | 9 | 2 | 1 | 0,2 | 0,3 | 0,5 | 2,5 |
1 | 5 | 0,5 | 1 | 0,1 | 0,15 | 3 | 2,5 |
2 | 7 | 1 | 1,5 | 0,1 | 0,2 | 2 | 5 |
3 | 9 | 1,5 | 2 | 0,1 | 0,25 | 1 | 1,5 |
4 | 8 | 2 | 2,5 | 0,1 | 0,3 | 0,5 | 1 |
5 | 4 | 0,5 | 1,5 | 0,15 | 0,2 | 2,5 | 2 |
6 | 6 | 1 | 2 | 0,15 | 0,25 | 1,5 | 1 |
7 | 8 | 1,5 | 2,5 | 0,15 | 0,3 | 2 | 1 |
8 | 10 | 2 | 3 | 0,2 | 0,2 | 1 | 0,5 |
9 | 12 | 1 | 3 | 0,2 | 0,25 | 1,5 | 0,5 |
Размерность значений всех величин в таблице 1 задана в системе СИ.
1.4. Порядок выполнения работы
1. При заданных значениях параметров задачи получить уравнение гармонических колебаний, определяющее изменение горизонтальной проекции усилия R, действующего на болт. Построить график зависимости этой величины от времени t.
2. При заданных значениях параметров задачи определить критические значения угловых скоростей электромоторов, при которых незакрепленный механизм будет подпрыгивать на фундаменте (для случаев, когда работает лишь один из электромоторов).
3. При заданных значениях параметров задачи получить уравнение гармонических колебаний, определяющее горизонтальное движение механизма по гладкому фундаменту в случае снятия крепления механизма. Построить график зависимости ординаты точки O от времени.
1.5. Пример решения
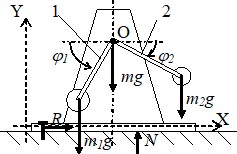
Рис. 2. Пример решения
Дано: m = 10 кг, m1 = 1 кг, m2 = 2 кг, l1 = 0,1 м, l2 = 0,2 м, ω1 = 2 с-1, ω2 = 1 с-1.
Решение:
1. Выберем объектом исследования механическую систему, состоящую из механизма массой m и двух точечных грузов массами m1 и m2.
2. Изобразим внешние силы, действующие на механическую систему: вес механизма – mg, веса грузов – m1g и m2g, нормальную реакцию фундамента – N и R – горизонтальную проекцию усилия на болт.
3. Воспользуемся следствием из теоремы о движении центра масс механической системы. Получим
![]() и
и ![]() . (1)
. (1)
4. Определим положение центра масс механической системы.
Пусть центр масс механизма находится в точке O с координатами x и y. Из рисунка 2 находим координаты точечных грузов:
x1 = x – l1 cos(ω1t), y1 = y – l1 sin(ω1t); x2 = x + l2 cos(ω2t), y2 = y – l2 sin(ω2t).
Координаты центра масс механической системы даются выражениями:
M xC = M x – m1 l1 cos(ω1t) + m2 l2 cos(ω2t), (2)
M yC = M y – m1 l1 sin(ω1t) – m2 l2 sin(ω2t).
5. Определим уравнение гармонических колебаний, определяющее изменение горизонтальной проекции усилия R, действующего на болт, и нормальной реакции фундамента – N. Для чего продифференцируем дважды выражения (2), учитывая, что при закрепленном механизме координаты точки O постоянны. Подставив результат в выражения (1), получим:
R = m1 l1 ω21 cos (ω1t) – m2 l2 ω22 cos (ω2t), (3)
N = M g + m1 l1 ω21 sin (ω1t) + m2 l2 ω22 sin (ω2t),(4)
6. Построим график зависимости от времени t гармонических колебаний, определяющих изменение горизонтальной проекции усилия R, действующего на болт. R=0,4 cos(2t)–0,4 cos(t).
7. Определим критические значения угловых скоростей электромоторов, при которых незакрепленный механизм будет подпрыгивать на фундаменте (для случаев, когда работает лишь один из электромоторов).
N =0, если ω21 = M g/ m1 l1, следовательно, ω1 = 31,6с-1.
N =0, если ω22 = M g/ m2 l2, следовательно, ω2 = 15,8с-1.
8. Определим уравнение гармонических колебаний, описывающее горизонтальное движение механизма по гладкому фундаменту в случае снятия крепления механизма.
Воспользуемся следствием из закона сохранения движения центра масс механической системы. Так как алгебраическая сумма проекций всех внешних сил, действующих на механическую систему, на ось x, равна нулю, то проекция вектора скорости центра масс движущейся механической системы на эту координатную ось будет равна нулю.
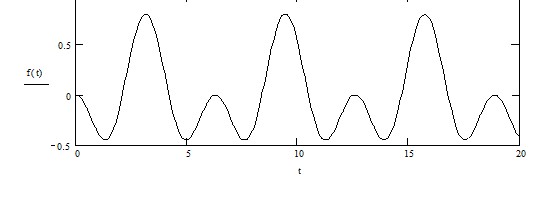
Рис. 3. Горизонтальная проекция усилия, действующего на болт
Так как в начальный момент времени центр масс механической системы был неподвижен (по условию), то, следовательно, он останется на месте и при работе механизма.
Выберем начало координат системы на рис. 2 так, чтобы абсцисса центра масс механической системы в начальный момент времени равнялась нулю. Из закона сохранения следует, что она будет равна нулю постоянно и при работе механизма. Тогда из первого выражения (2) следует, что уравнение гармонических колебаний, определяющее горизонтальное движение механизма по гладкому фундаменту в случае снятия крепления механизма, имеет вид:
M x = m1 l1 cos (ω1t) – m2 l2 cos (ω2t).(5)
9. Построим график зависимости ординаты точки O от времени t.
x = 0,01 cos(2t) – 0,04 cos(t).
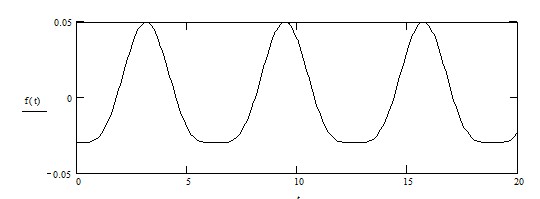
Рис. 4. Горизонтальное движение механизма
1.6. Контрольные вопросы
1. Что такое механическая система?
2. Что такое масса механической системы?
3. Как определить положение центра масс механической системы?
4. Какие силы называются внутренними?
5. Какие силы называются внешними?
6. Сформулировать теорему о движении центра масс мех. системы.
7. Сформулировать следствие из теоремы о движении центра масс механической системы.
8. Сформулировать закон (и следствие из закона) сохранения движения центра масс механической системы.
9. Что такое частота колебаний, период, амплитуда колебания?
Лабораторная работа Д4(2)
2. ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА МЕХАНИЧЕСКОЙ СИСТЕМЫ К РЕШЕНИЮ ЗАДАЧ ДИНАМИКИ
2.1. Краткие сведения из теории
Теорема об изменении кинетического момента механической системы:
![]() ,
,
где Lz – кинетический момент системы относительно оси z ;
![]() – сумма моментов относительно оси z всех приложенных к системе внешних сил.
– сумма моментов относительно оси z всех приложенных к системе внешних сил.
При применении теоремы к системе, состоящей из плиты и груза, кинетический момент Lz системы относительно оси z определяется как сумма моментов плиты и груза:
![]() ,
,
где ![]() – кинетический момент плиты – вращающегося вокруг оси z твердого тела:
– кинетический момент плиты – вращающегося вокруг оси z твердого тела:
![]() ,
,
где Jz – момент инерции плиты относительно оси вращения;
щ – угловая скорость вращения.
![]() – кинетический момент груза относительно оси z, который определяется как момент его количества движения. А так как груз движется по плите, то следует учесть, что абсолютная скорость груза складывается из относительной
– кинетический момент груза относительно оси z, который определяется как момент его количества движения. А так как груз движется по плите, то следует учесть, что абсолютная скорость груза складывается из относительной ![]() и переносной
и переносной ![]() скоростей, то есть
скоростей, то есть ![]() , поэтому и количество движения этого груза
, поэтому и количество движения этого груза ![]() . В этом случае можно воспользоваться теоремой Вариньона, согласно которой
. В этом случае можно воспользоваться теоремой Вариньона, согласно которой ![]() . Эти моменты вычисляются так же, как и моменты сил.
. Эти моменты вычисляются так же, как и моменты сил.
Момент инерции прямоугольной пластины массой m относительно оси Сz, лежащей в плоскости пластины и проходящей через ее центр масс С, равен:
![]() , где а – длина пластины.
, где а – длина пластины.
Момент инерции прямоугольной пластины массой m относительно оси Сz, перпендикулярной пластине и проходящей через ее центр масс С, равен:
![]() , где a и b – длина и ширина пластины.
, где a и b – длина и ширина пластины.
Моменты инерции круглой пластины массой m и радиусом R равны:
![]() – относительно оси Сz, лежащей в плоскости пластины и проходящей через ее центр масс С.
– относительно оси Сz, лежащей в плоскости пластины и проходящей через ее центр масс С.
![]() – относительно оси Сz, перпендикулярной пластине и проходящей через ее центр масс С.
– относительно оси Сz, перпендикулярной пластине и проходящей через ее центр масс С.
Для определения момента инерции пластины относительно произвольной оси z необходимо воспользоваться теоремой Гюйгенса-Штейнера:
![]() ,
,
где IC – момент инерции относительно оси, параллельной оси z и проходящей через центр С пластины; h – расстояние между этими осями.
2.2. Условие задачи
Механическая система состоит из плиты массой m1 и груза D массой m2. Плита вращается вокруг вертикальной оси z, проходящей через точку O. В момент времени t0 = 0 груз D начинает двигаться под действием внутренних сил из точки А по имеющему на плите прямолинейному желобу или желобу радиуса r. Закон его движения s = AD = f(t) задан в табл. 1, где s выражено в метрах, а t – в секундах.
Плита имеет в момент времени t0 = 0 угловую скорость ω0. Ось вращения перпендикулярна плоскости плиты и смещена от центра C плиты. Размеры плиты показаны на рис. 5 и их значения заданы в табл. 1.
Считая груз материальной точкой и пренебрегая всеми сопротивлениями:
определить угловую скорость плиты щ1 в произвольный момент времени; построить график зависимости щ1 (t) в интервале времени (0, 10) с; определить по графику максимальное и минимальное значения угловой скорости щ1 и в какие моменты в этом интервале времени щ1 имеет максимальное и минимальное значения; изменив направление движение груза на противоположное, определить как изменится угловая скорость плиты щ2 ; в том же интервале времени построить график зависимости щ2 (t).2.3. Задания к лабораторной работе
Таблица 2
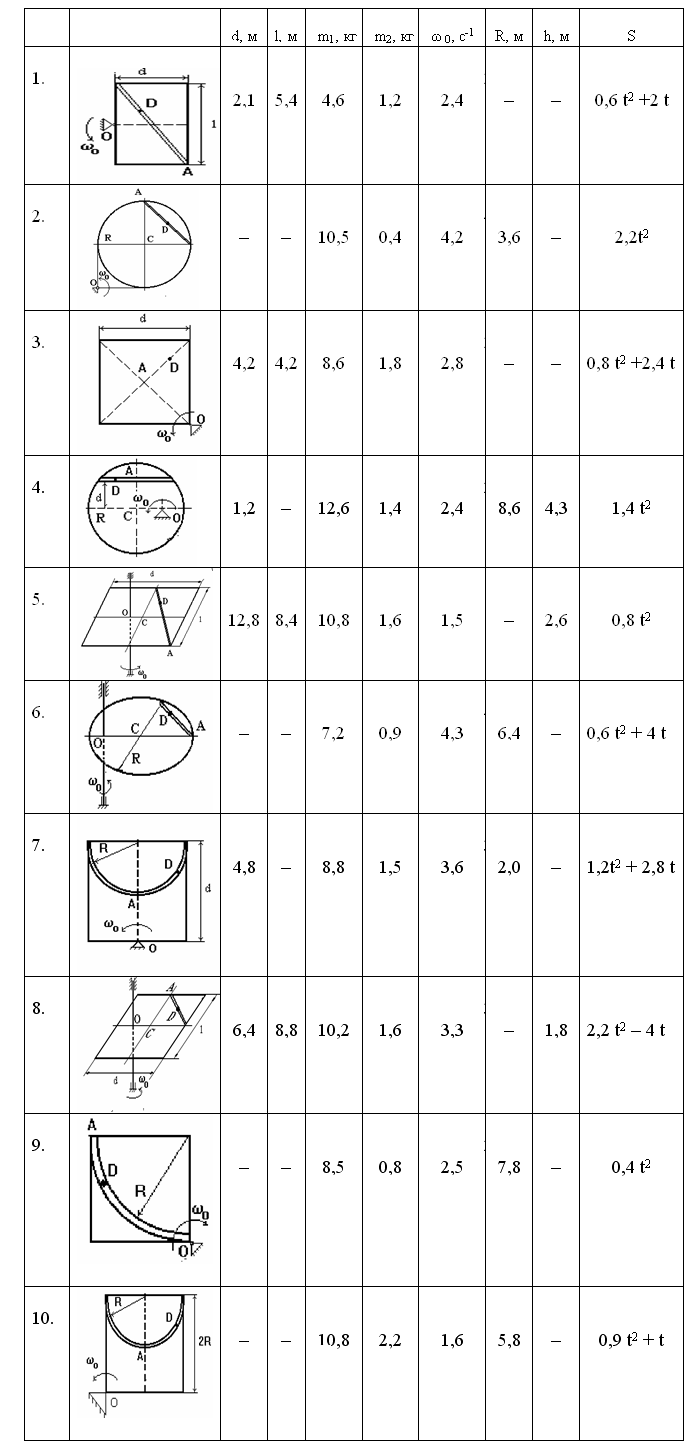
2.4. Пример решения задачи
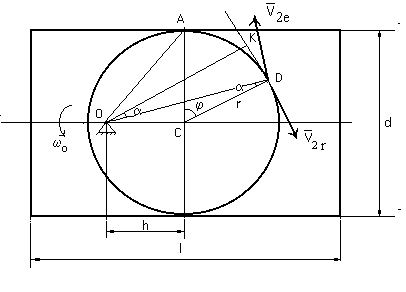
Рис. 5. Пример решения
Дано: m1 = 6 кг; m2 =1 кг; d = 6 м; l = 10 м; щ0 = 1,6 c-1 ; h = l/4; r = d/2; s = 2t + 0,1 t2.
Решение:
1. Используем теорему об изменении главного кинетического момента относительно оси z механической системы, состоящей из плиты 1 и груза D:
![]()
Моменты сил тяжести относительно оси z равны нулю, так как эти силы параллельны оси z. Моменты реактивных сил относительно оси z равны нулю, так как эти силы пересекают ось z.
Тогда:
![]()
Отсюда следует, что Lz = const.
Таким образом, кинетический момент системы сохраняется в любой момент времени:
Lz0=Lz, (1)
где Lz0 – кинетический момент системы в начальный момент времени.
Определим величину Lz0, выразив главный кинетический момент механической системы относительно оси z как сумму кинетических моментов плиты 1 и груза D:
![]() , (2)
, (2)
Кинетический момент плиты 1 находим по формулам вращающегося с угловой скоростью ![]() тела:
тела:
![]()
Момент инерции плиты относительно центральной оси Jс равен:
Jс = m1[l2+d2]/12
Тогда момент инерции плиты относительно оси z, проходящей через точку О, находим по теореме Гюйгенса–Штейнера: Jz = Jс + m1 h2.
Груз D в начальный момент времени находится в точке А и вращается вместе с плитой с угловой скоростью ![]() . Его кинетический момент:
. Его кинетический момент:
![]() , где ОА2=h2+r2
, где ОА2=h2+r2
Тогда, подставляя в (2), получаем кинетический момент системы в начальный момент времени:
![]() , (3)
, (3)
Определим кинетический момент системы в произвольный момент времени. Аналогично он складывается из кинетических моментов плиты 1 и груза D:
![]() , (4)
, (4)
Угловая скорость системы изменяется с течением времени. Обозначим ее ![]() . Кинетический момент плиты (вращающегося тела):
. Кинетический момент плиты (вращающегося тела):
![]() .
.
Кинетический момент груза D относительно оси z находим, как момент его количества движения, рассматривая движение груза как сложное и считая его движение по платформе относительным, а вращение самой платформы вокруг оси z – переносным движением. Абсолютная скорость груза определяется выражением: ![]() . Так как груз по плите движется по закону
. Так как груз по плите движется по закону
s = AD =2t+0, 1t2, то v2r = ds/dt и v2r =2 + 0,2t.
Учитывая направление вращения, изображаем вектор ![]() (
(![]() ⊥OD); численно v2e= щ? OD.
⊥OD); численно v2e= щ? OD.
Тогда по теореме Вариньона:
![]() = – m2v2r OK + m2v2e OD = – m2v2rOK + + m2OD2щ1.
= – m2v2r OK + m2v2e OD = – m2v2rOK + + m2OD2щ1.
Из рис. 1 видно, что OD можно найти по теореме косинусов:
![]() ,
,
а угол ![]() определяется:
определяется: ![]() ,
,
OK= OD cos(б),
где б определяется по теореме синусов: 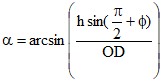 .
.
Подставляя найденные величины в (4), находим кинетический момент системы в произвольный момент времени:
![]() . (5)
. (5)
Подставляя (3) и (5) в (1), получим выражение для угловой скорости щ1:
![]() . (6)
. (6)
Угловая скорость плиты щ1 зависит от времени, так как входящие в (6) величины v2r, OK, OD зависят от времени.
Расчеты искомых величин и построение графика зависимости щ1(t) проведем с помощью программы? Mathcad:

Рис. 6. График зависимости щ1(t)
3. При t =2 с щ1min = 1,52 c-1; при t = 8,2 c щ1max = 1,84 c-1.
4. В случае, если направление движения груза D изменится на противоположное (против часовой стрелки), изменится на противоположный знак момента количества движения от относительной скорости v2r, тогда (5) примет вид:
![]()
и скорость плиты будет:
![]() .
.
График зависимости щ2 (t) построим также, используя программу Mathcad:
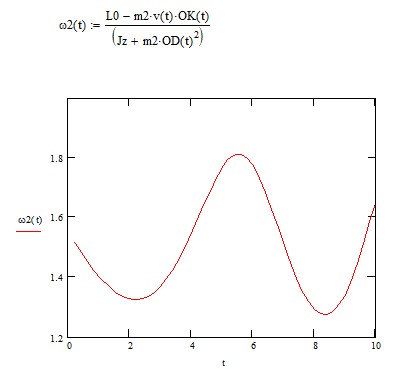
Рис. 7. График зависимости щ2(t)
2.5. Контрольные вопросы
1. Что такое кинетический момент материальной точки относительно центра и относительно оси?
2. Что такое главный кинетический момент механической системы относительно центра и относительно оси?
3. Как определить главный кинетический момент тела, вращающегося вокруг неподвижной оси?
4. Сформулировать теорему об изменении главного кинетического момента механической системы относительно центра.
5. Сформулировать закон сохранения главного кинетического момента механической системы.
6. Как найти момент инерции круглой пластины относительно оси, проходящей через центр пластины?
7. Как найти момент инерции прямоугольной пластины относительно оси, проходящей через центр пластины?
8. Сформулировать теорему Гюйгенса – Штейнера.
Рекомендуемая литература
Никитин теоретической механики. – М.: Высш. шк., 1990. – 608 с. Яблонский теоретической механики. Ч.1–2. – М.: Высш. шк., 1977. – 528 с. , , Кильчевская теоретической механики. – 2-е изд. – Киев: Высш. шк., 1986. – 415 с. Тарг курс теоретической механики. – М.: Наука, 1972. – 320 с. Попов механика. Краткий курс. – М.: Наука, 1986. – 385 с. Мещерский задач по теоретической механике. – М.: Наука, 1986. – 448 с. Сборник задач для курсовых работ по теоретической механике / Под ред. . – М.: Высш. шк., 1968. – 368 с.
