

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 629.7.05
С. Ю. КОРОЛЕВ
(Военно-космическая академия имени , город Санкт-Петербург)
К вопросу об адаптивной комплексной обработке информации в интегрированной навигационной системе космического аппарата
В работе рассматривается подход к решению актуальной задачи обеспечения требуемой точности определения параметров навигации и ориентации малого космического аппарата в условиях априорно-неопределенных возмущающих факторов. Решение задачи основывается на применении адаптивной комплексной обработки навигационной информации с использованием модифицированного фильтра Калмана.
Введение
В настоящее время рядом отечественных и зарубежных организаций ведутся работы по созданию орбитальных средств, способных обнаруживать космические объекты и проводить их техническое диагностирование. Как правило, такие средства представляют собой малые космические аппараты (МКА), способные выполнять орбитальные маневры. Исходными данными для расчета маневра являются параметры движения центра масс (навигации) и параметры углового положения (ориентации) МКА. Одной из важнейших систем бортового комплекса управления является навигационная система (НС), осуществляющая расчет требуемых параметров навигации и ориентации. Ограничения массогабаритных характеристик (МГХ) МКА ведет к ограничению возможности использования высокоточных измерительных устройств, ввиду их сравнительно большой массы. Совершенствование методического и алгоритмического аппарата навигационного обеспечения может создать предпосылки использования в интегрированных НС высокоточных датчиков в сочетании с менее точными и обладающими меньшими МГХ. Такой состав НС позволит обеспечить требуемую точность определения параметров навигации и ориентации МКА при снижении его МГХ.
Существующие алгоритмы определения параметров навигации и ориентации базируются на предположении о стационарном характере погрешностей измерительных устройств. Однако комплексный априорно неопределенный характер возмущающих факторов, приводящий к непредсказуемым изменениям условий функционирования НС и возникновению нештатных ситуаций, делает использование существующих методов в НС маневрирующих МКА не всегда эффективным [6]. Доклад посвящен теоретическому подходу к решению задачи обеспечения требуемой точности определения параметров навигации и ориентации МКА в условиях априорно-неопределенных возмущающих факторов, основанному на применении адаптивной комплексной обработки навигационной информации с использованием модифицированного фильтра Калмана.
Схемы обработки информации в навигационных системах
Анализ существующих схем построения НС показывает, что их основу традиционно составляют инерциальные измерительные устройства, коррекция которых осуществляется с помощью спутниковых навигационных систем. Такие интегрированные НС нашли широкое распространение в составе систем управления различных подвижных объектов. Сочетание инерциальных измерителей и спутниковой навигации является удачным для реализации достоинств составных частей и для исключения их недостатков [2]. Для компенсации растущей ошибки в определении углового положения инерциальными датчиками в состав бортовых систем МКА также включаются оптико-электронные измерительные устройства (звездный датчик, солнечный датчик и т. п.).
Широко известная разомкнутая схема комплексирования подразумевает использование полученных с помощью спутниковой навигационной системы и оптико-электронных измерительных1 устройств параметров в качестве начальных условий для инерциальной системы [11]. Её неоспоримым достоинством является простота реализации. Однако такая схема построения НС не всегда обеспечивает требуемую высокую точность определения параметров ориентации и навигации в условиях высокой динамики движения маневрирующего МКА, а также вследствие влияния нестационарных возмущающих воздействий.
Следующей по сложности интеграции является слабосвязанная схема комплексирования, которая характеризуется применением оптимального фильтра Калмана. Данная схема обладает высокой надежностью и обеспечивает высокую точность измерения. Однако эти достоинства проявляются только в условиях стационарности погрешностей измерительных устройств, но априорно неопределенный характер возмущающих факторов не позволяет рассматривать их как стационарные.
В теории комплексной обработки навигационной информации известны также сильно связанные и глубоко интегрированные схемы комплексирования [7]. В сильно связанных (или жестко связанных) схемах роль инерциальной системы сводится лишь к измерению первичных параметров поступательного и вращательного движений, например, проекций кажущегося ускорения и абсолютной угловой скорости вращения объекта. К недостаткам жестко связанных систем можно отнести: необходимость разработки специальной навигационной аппаратуры потребителя, использование сложных соотношений для измерений, ухудшение надежности, т. к. отказ инерциальных измерителей приводит к отказу системы в целом.
Глубоко интегрированные схемы являются еще более сложными и менее гибкими с точки зрения организации их структуры, имеют жесткую организацию связей и единый выход. Традиционные контуры слежения за кодом и доплеровской частотой сдвига несущей оказываются включенными в общий интегральный фильтр комплексной системы. В такой схеме фильтр должен обладать двадцатым-сороковым порядком, и для его реализации требуется бортовая вычислительная машина с высоким быстродействием [7]. Ключевой недостаток сильно связанных и глубоко интегрированных схем заключается в более глубокой зависимости надежности от стабильности получения первичной навигационной информации.
В настоящее время известен ряд работ [1, 3, 5, 8, 9, 10, 12] посвященных совершенствованию НС, построенных по слабосвязанной схеме комплексирования. Однако предложенные методы базируются на предположении о статистическом характере помех измерения, что делает их использование в НС МКА малоэффективным [6]. Между тем, в известной работе предлагаются и исследуются эффективные алгоритмы контроля и диагностики информационных отказов и нарушений НС [4]. Применение этой теории в совокупности с известными принципами синтеза адаптивного фильтра Калмана позволяют предложить структуру НС построенной по слабосвязанной схеме и способной учитывать влияние возмущающих факторов и нештатных ситуаций, присущих полету маневрирующего МКА, а также способной сохранять работоспособность в случае кратковременного отказа одного из измерителей.
Схема адаптивной комплексной обработки информации в навигационной системе
Преодоление недостатков рассмотренных схем возможно за счет включения в состав НС датчиков контроля условий функционирования, а также использовании в синтезе алгоритмического обеспечения алгоритмов контроля и диагностики информационных отказов и нарушений и адаптивной модификации фильтра Калмана. Модификация будет заключаться во внесении в фильтр регулятора, блока идентификации, базы данных моделей динамики КА, базы данных погрешностей, банка матриц. Функциональная структура предлагаемой НС представлена на рисунке 1.
На основе совокупности входных параметров, к которым относится:
- оценка вектора выходных навигационных параметров x̂, вектор первичной информации с датчиков y, вектор невязки z(t), значения априорных погрешностей датчиков дxизв, вектор условий функционирования d, совокупность моделей динамики КА M,
в блоке идентификации происходит выявление влияния возмущающих факторов и возникших нештатных ситуаций, формируется вектор информационных нарушений![]() . В соответствии с этим вектором регулятор на основе базы данных формирует матрицу наблюдений и переходную матрицу. Таким образом, достигается оперативное изменение параметров обработки навигационной информации и адаптация системы к условиям функционирования.
. В соответствии с этим вектором регулятор на основе базы данных формирует матрицу наблюдений и переходную матрицу. Таким образом, достигается оперативное изменение параметров обработки навигационной информации и адаптация системы к условиям функционирования.
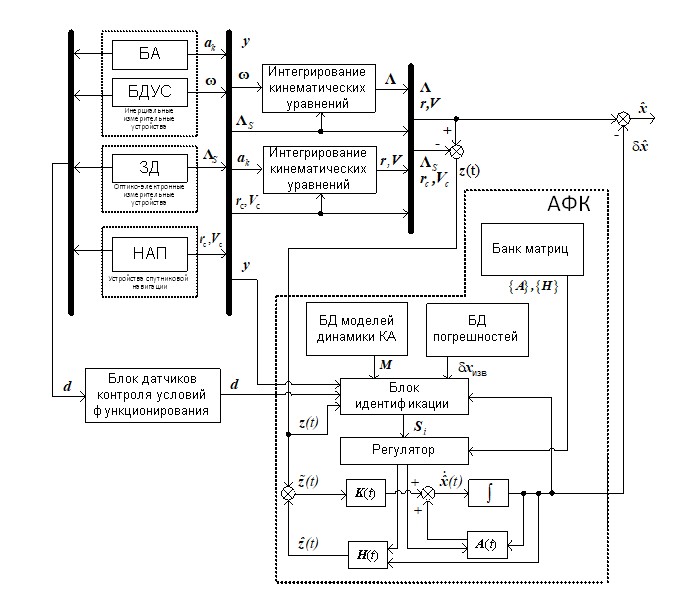
Рисунок 1 – Слабосвязанная схема комплексирования с адаптивным фильтром Калмана.
Алгоритм работы адаптивного фильтра Калмана можно представить в виде следующих операций:
Вычисляется невязка между полученными различными измерительными устройствами параметрами навигации и ориентации:![]() 12
12
![]() , 34
, 34
![]() ,
,
где ![]() – матрица
– матрица ![]() , называемая матрицей состояния;
, называемая матрицей состояния;
![]() – n-мерный вектор состояния системы;
– n-мерный вектор состояния системы;
![]() – матрица размера
– матрица размера ![]() , называемая матрицей возмущения;
, называемая матрицей возмущения;
![]() – p-мерный вектор возмущения;
– p-мерный вектор возмущения;
![]() – m-мерный вектор измерения;
– m-мерный вектор измерения;
![]() – непрерывная матрица размера
– непрерывная матрица размера ![]() , называемая матрицей наблюдения;
, называемая матрицей наблюдения;
![]() – m-мерный вектор погрешности измерения
– m-мерный вектор погрешности измерения
находится оптимальная оценка удовлетворяющая уравнению
![]() , 56
, 56
где ![]() , а
, а ![]() – матрица передачи фильтра размера
– матрица передачи фильтра размера ![]() .
.
![]() , 78
, 78
где ![]() – корреляционная матрица ошибки фильтрации размера
– корреляционная матрица ошибки фильтрации размера ![]() .
.
![]() 910
910
с начальным условием ![]() , где
, где ![]() – матрица размерностью
– матрица размерностью ![]() , называемая матрицей интенсивностей шумов чувствительных элементов. Оценкой качества комплексирования является корреляционная матрица
, называемая матрицей интенсивностей шумов чувствительных элементов. Оценкой качества комплексирования является корреляционная матрица ![]() , в частности, ее диагональные элементы, представляющие собой дисперсии погрешностей оцениваемых параметров навигации
, в частности, ее диагональные элементы, представляющие собой дисперсии погрешностей оцениваемых параметров навигации ![]() .
.
Новизна предложенного алгоритма заключается в непрерывном обновлении матриц ![]() ,
, ![]() и вектора
и вектора ![]() в зависимости от возмущающих факторов
в зависимости от возмущающих факторов ![]() и возникающих нештатных ситуаций
и возникающих нештатных ситуаций ![]() . Искомые векторы и матрицы могут быть найдены вследствие решения задачи идентификации технического состояния навигационных систем и их элементов в соответствии с методами, изложенными в работе [4]. Блок идентификации в данном случае является средством диагностики, а регулятор – формирователем значений элементов обновленных матриц
. Искомые векторы и матрицы могут быть найдены вследствие решения задачи идентификации технического состояния навигационных систем и их элементов в соответствии с методами, изложенными в работе [4]. Блок идентификации в данном случае является средством диагностики, а регулятор – формирователем значений элементов обновленных матриц ![]() ,
, ![]() и вектора
и вектора ![]() .
.
Заключение
Реализация предлагаемого подхода предположительно позволит снизить скорость роста погрешностей определения местоположения и вектора скорости в случае кратковременного пропадания сигналов спутниковой навигационной системы, а также погрешностей определения углового положения в случае временной неработоспособности оптико-электронных измерительных устройств.
ЛИТЕРАТУРА
Андреев инерциальной навигации. Корректируемые системы [Текст] / - М.: Наука, 1967. - 648 с. Анцифиров, С. А., Кондратов, Д. В., Могилевич, момент в поплавковом маятниковом акселерометре на вибрирующем основании при несимметричном истечении жидкости в торцы [Текст] / , , // Изв. РАН. Механика твердого тела. 2006 №3. С 16-29. Голяков, влияния надежности и стойкости адаптивных ин-формационно-измерительных навигационных систем на эффективность их использования [Текст] / , // Навигация и гидрография. 2013, № 36. С. 9-15. Дмитриев, надежность, контроль и диагностика навигационных систем [Текст] / , , – СПб.: ГНЦ РФ «ЦНИИ «Электроприбор», 2003.–207с. Забегаев, фильтра Калмана для использования с локальной и глобальной системой навигации [Электронный ресурс] / , // Препринты ИПМ им. . – 2010. – № 82. – 24 с. Режим доступа: http://library. keldysh. ru. Земляков, систем управления летательными аппаратами при отказах [Текст] / , , // Автоматика и телемеханика. – 1996. – №1. – С.3-20. Красильщиков, информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов [Текст] / , . - М.: ФИЗМАТЛИТ, 2009. - 556 с. - ISBN 978-5-9221-1168-3. Пат. 2539846 Российская Федерация, МПК7 H 04 В 1/38, Н 04 J 13/00. Инерциально-радионавигационная система / , , ; заявитель и патентообладатель .-исслед. ин-т телевидения - № 000/28 , заявл. 18.10.2013, опубл. 27.01.2015, Бюл. №3 – 19 с.: ил. Пат. № 000 Российская Федерация, МПК-8 G01C 23/00. Инерциально-спутниковая навигационная система с комбинированным использованием спутниковых данных / , , заявитель и патентообладатель ЗАО "Лазекс" опубл. 20.09.2008, Бюл. №26 Патент № 000 Российская Федерация, МПК8 G01C 23/00, Инерциально-спутниковая навигационная система / , , заявитель и патентообладатель ФГУП «Государственный научно-исследовательский институт авиационных систем» № 000/28 заявл. 10.02.2003 опубл. 27.07.2004 Распопов, построения бесплатформенных инерциальных навигационных систем [Текст] / , . – СПб.: ГНЦ РФ «ЦНИИ Электроприбор», 2009. – 290 с. Фоминов, структура адаптивного информационно-измерительного комплекса подвижного объекта [Текст] / // Известия вузов. Приборостроение. 2013. №7. Т. 56. С. 5–9.Текст доклада согласован с научным руководителем.
Научный руководитель: кандидат технических наук
![]()
докторант Военно-космической академии
имени
____________
Научный руководитель кандидат технических наук докторант
