

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
SIMULATION OF FLUCATUATION OF RADAR SIGNAL REFLECTED FROM DISTRIBUTED TARGET
Vdovkin K. A., Vazhenin V. G.Ural Federal University named after the first President of Russia B. N.Yeltsin
Institute of Radio engineering and Information Technologies
32, Mira sq., Yekaterinburg.
620002, Russian Federation
Ph.: 8 (950) 6327802, e-mail: ka. *****@***com
Abstract — provided comparison of different methods for the calculation of the apparent center of distributed target for echo signal simulator. Performed a quantitative analysis of the fluctuations of the apparent center due to phase shift signals from the individual elements and due to changes of the scan angle.
ИМИТАЦИЯ ФЛУКТУАЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ,
ОТРАЖЕННЫХ ОТ РАСПРЕДЕЛЕННОЙ ЦЕЛИ
,
Уральский федеральный университет имени первого Президента России
Институт радиоэлектроники и информационных технологий – РТФ
г. Екатеринбург, 620002, Россия
, e-mail: ka. *****@***com
Аннотация — Приводится сравнение различных способов вычисления кажущегося центра пространственно-распределённой цели для построения имитатора отраженного сигнала. Производится количественный анализ отклонения кажущегося центра вследствие флуктуации фазового смещения сигналов от отдельных элементов цели и вследствие изменения угла сканирования.
I. Введение
Для имитации сигнала, отражённого от цели, распределённой по угловой координате, можно использовать систему из двух антенн, разнесённых относительно оси ДНА пеленгатора на некоторый угол, не превышающий разрешающую способность моноимпульсного пеленгатора.
Флуктуации амплитудно-фазовых характеристик сигналов, излучаемых антеннами имитатора, будут приводить к флуктуации волнового фронта вблизи приёмной антенны РЛС и, следовательно, флуктуации энергетического центра распределенной цели. Для достоверной имитации отражённого сигнала от пространственно-распределённой цели необходимо создание в приёмном тракте РЛС сигнала с флуктуационными характеристиками близкими к характеристикам, полученным от реальной цели.
II. Основная часть
В [1] производится глубокий анализ статистических характеристик блуждания кажущегося центра (КЦ) распределённой цели, при этом в качестве положения КЦ принимается направление градиента волнового фронта сигнала в точке приёма. Показано, что форма волнового фронта определяется как амплитудными характеристиками элементарных отражателей, составляющих распределённую цель, так и их фазовыми соотношениями, причём изменение последних, например, при движении носителя как правило рассматривается как случайный процесс.
Данный подход широко распространён, однако в [2] показано, что при использовании моноимпульсного пеленгатора отождествление направления пеленга с нормалью к волновому фронту справедливо только для линейной пеленгационной характеристики РЛС. Для реальной РЛС вследствие нелинейности формы волнового фронта от многоточечной цели определяемое угловое положение цели будет
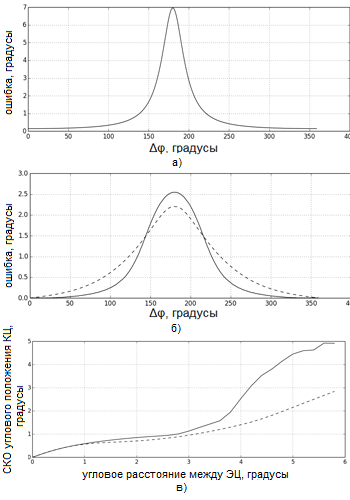
Рис. 1. Угловые флуктуации двухточечной цели, вызванные смещением фазы принятых сигналов: а) флуктуация градиента волнового фронта, б) отклонение равносигнального направления (сплошная линия) и усреднённого углового положения в моноимпульсном пеленгаторе, в) СКО ошибки пеленгования в зависимости от угловых размеров цели
Fig. 1. Angular fluctuations of a two-point target, caused by phase shift of the received signals
отличаться от направления градиента волнового фронта. В [2] при анализе угломерного шума двухточечной цели используется понятие равносигнального направления, то есть направления сканирования, при котором амплитуда сигнала в разностном канале РЛС равна нулю. Данный способ определения центра распределённой цели вполне применим в режиме сопровождения цели, когда сигнал отклонения от равносигнального направления служит сигналом управления, однако в режиме обзора РЛС производит сканирование сектора пространства, поэтому более корректно в данном случае рассматривать усреднённое значение углового положения цели, которое получается на выходе углового дискриминатора за время сканирования.
На рис. 1 приведены результаты математического моделирования различных способов определения углового положения КЦ на примере цели, состоящей из двух дискретных отражателей – элементов цели (ЭЦ), расположенной симметрично относительно оси суммарной ДНА РЛС. В модели используется амплитудная суммарно-разностная РЛС с шириной суммарной диаграммы направленности по уровню половины мощности порядка 12⁰. Для моделируемой РЛС уровень флуктуаций градиента волнового фронта более чем в два раза превышает уровень флуктуаций пеленгуемого углового положения цели, следовательно, направление градиента волнового фонта не может использоваться в качестве критерия определения уровня флуктуации углового положения КЦ. Кроме того, отклонение равносигнального направления от геометрического центра цели отличается от углового положения, полученного усреднением значения на выходе углового дискриминатора, причём это различие увеличивается с увеличение угловых размеров пеленгуемой цели, следовательно, при построении имитатора отраженного сигнала необходимо учитывать различие характера флуктуации положения КЦ в режиме сопровождения цели и в режиме обзора.
Значение на выходе углового дискриминатора моноимпульсного пеленгатора также зависит от угла сканирования РЛС. На рис. 2 показано отклонение положения КЦ двухточечной цели в процессе сканирования для различных значений углового расстояния между элементами цели. Увеличение углового расстояния между элементами цели приводит к увеличению амплитуды отклонения КЦ в процессе сканирования. В ряде случаев, текущий угол сканирования в имитаторе может быть учтён при проведении эксперимента. В [3] описывается имитатор отраженного сигнала, содержащий несколько антенн, работающих в приёмо-передающем режиме, что позволяет определять угол сканирования для каждого излучённого импульса и вносить соответствующие поправки в амплитудные характеристики излучаемых сигналов. Однако, определение текущего угла сканирования является сложной инженерной задачей, особенно при наличии фазовой несимметричности антенной системы РЛС и имитатора. Кроме того, при использовании в качестве антенной системы РЛС активной фазированной антенной решетки (АФАР) с цифровым формированием диаграммы направленности, где для одного излучаемого импульса может быть построено сразу несколько приёмных диаграмм направленности, такой подход невозможен. В этом случае текущий угол сканирования и отклонение КЦ цели можно считать случайными величинами, а процесс изменения угла пеленга в процессе сканирования – флуктуацией КЦ распределённой цели, дополняющей флуктуацию, вызванной случайными изменениями фазовых характеристик объекта радиолокации. Из рис. 2 видно, что при большом расстоянии между элементами цели (или антеннами имитатора) значение неопределённости углового положения КЦ, вызванное неопределённостью угла сканирования, может превышать уровень флуктуаций, вызванных фазовым сдвигом сигналов от элементов цели. Для обеспечения достоверной имитации при работе РЛС в режиме обзора отклонение КЦ в процессе сканирования должно быть мало по сравнению со значением фазовых флуктуаций, что ограничивает максимальный разнос антенн имитатора и сужает диапазон имитируемого углового положения цели.
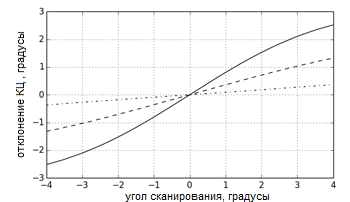
Рис. 2. Отклонение КЦ цели в зависимости от угла сканирования для углового расстояния между элементами цели 2⁰, 4⁰ и 6⁰
Fig. 2. Deviation of the apparent center of the target, depending on the scan angle
III. Заключение
1. По результатам математического моделирования показано, что для имитации флуктуации кажущегося центра пространственно-распределённой цели недостаточно учитывать только флуктуации нормали к волновому фронту сигнала. Для режима сопровождения цели необходимо моделировать флуктуации равносигнального направления, для режима обзора – усредненного углового положения в пеленгаторе за время сканирования с учётом реальных характеристик РЛС.
2. На положение кажущегося центра цели также текущий угол сканирования РЛС. Неопределённость угла сканирования будет приводить к дополнительной неопределённости углового положения КЦ имитируемой цели, сравнимой с уровнем флуктуации КЦ, вызванного фазовой несимметричностью. Уровень неопределённости увеличивается с ростом углового расстояния между элементами цели, что ограничивает диапазон имитируемых углов при работе РЛС в режиме обзора.
IV. References
[1] Ostrovitjaninov R. V., Basalov. F.A. Statisticheskaja teorija radiolokacii protjazhennyh celej [Statistical theory of extended radar targets ] Moskow, 1988. 227 p.
[2] Leonov A. I., Fomichev K. I., Monoimpul'snaja radiolokacija [Monopulse radiolocation] Moskow, 1984. 312 p.
[3] Adodin V. M., Vazhenin V. G., Vdovkin K. A., Djad'kov N. A. Stend polunaturnogo modelirovanija vychislitel'nyh sistem bortovyh RLS obzora zemnoj poverhnosti [Seminatural simulation stand for onboard radar of survey the Earth's surface] Radiovysotometrija, 2007, No 2, pp 230 – 233
