

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Сингулярный метод формирования
сигналов широтно-импульсной модуляции для двигателей постоянного тока
*****@***ru
Приведено описание формирования сигналов широтно-импульсной модуляции для управления двигателей постоянного тока и сервоприводов импульсного управления (часть 2). Это позволяет уменьшить затраты на разработку аппаратного сопряжения и использовать широко распространенный программно-аппаратный протокол обмена rs-485.
- Сингулямрность от лат. singularis — единственный, особенный: сингулярность в философии (от лат. singularis — единственный) — единичность существа, события, явления;
1. Исходные сигналы для создания ШИМ
Для формирования сигнала ШИМ от rs-485 минимально, можно передавать коды сигналов x00 до xFF (0000-0000 и 1111-1111 в битовой записи). Весь ансамбль состоит из 9 сигналов x00, x01, x03, x07, x0F, x1F, x3F, x7F, xFF. На рисунке 1 приведена последовательность 5 байт x00.
На всех диаграммах отображается по оси X-время, по оси Y - напряжение на выходной шине D+ относительно общей шины питания. Противофазное напряжение формируется на D - [Л1]. Средний ток определяется, как средний ток в нагрузке на шине rs-485.

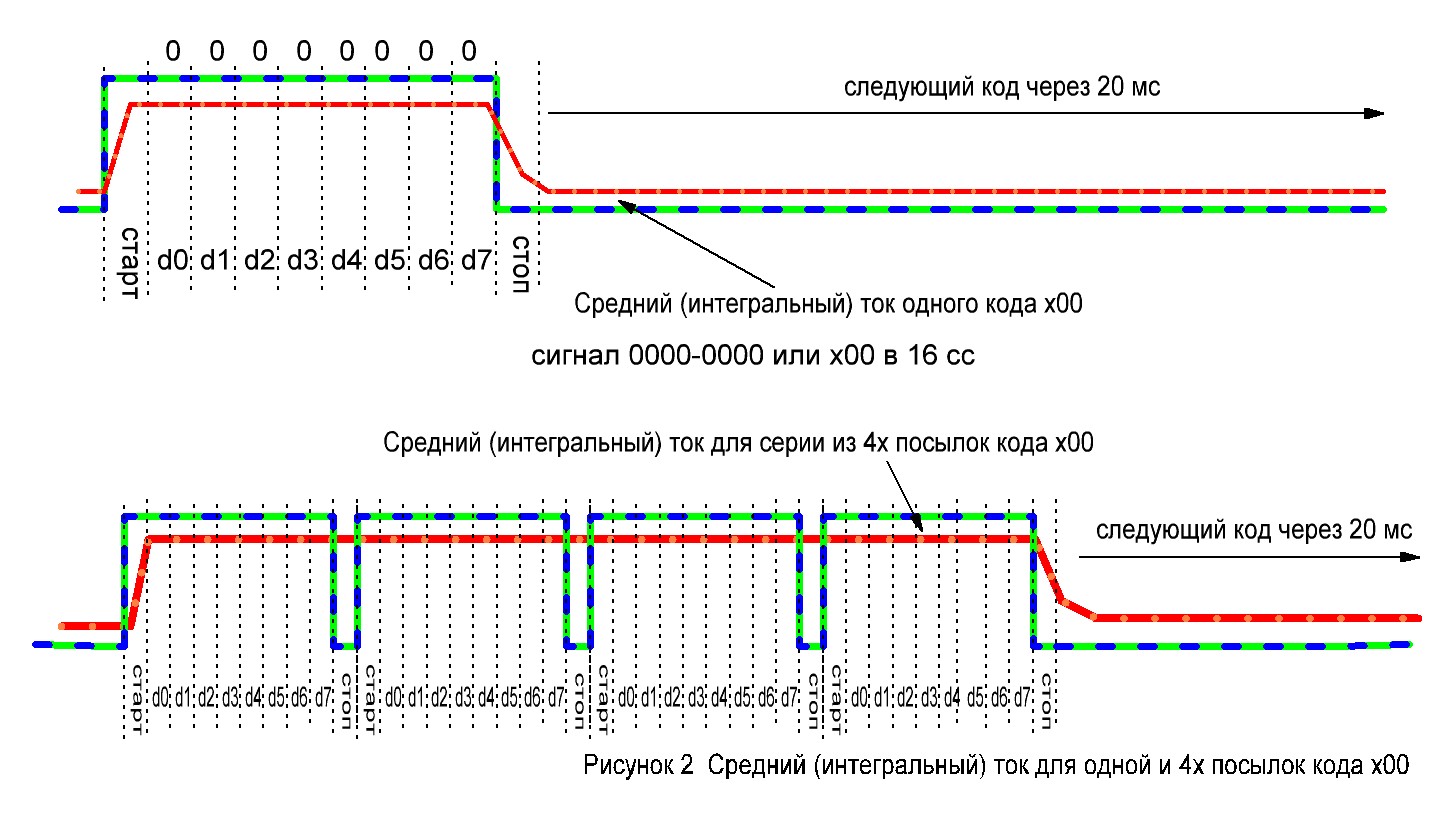
Очевидно, что средний (интегральный) ток на нагрузке при последовательности всех x00 будет минимальный. И максимальный ток, можно сформировать при передаче последовательности сигналов xFF. Промежуточный ток формируют сигналы имеющегося ансамбля. На рисунке 2 показана последовательность для x07 (0000-0111). Утолщенной линией показан уровень тока при разных кодах серии.

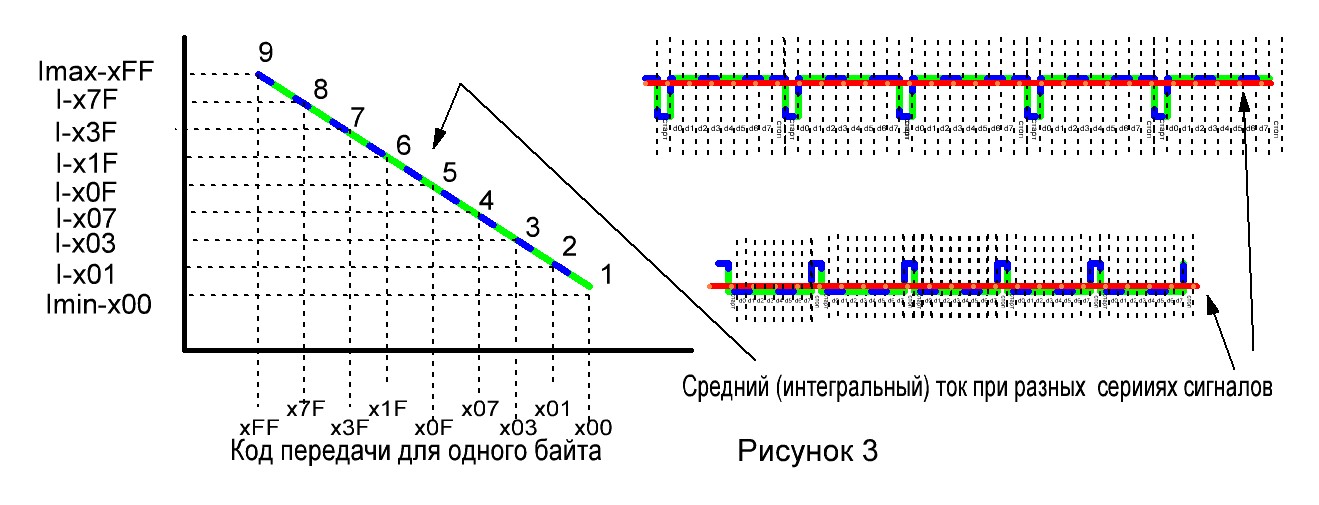
Подсчет количества «точности» проводим по тактовым интервалам. Под точностью предлагается значение количества возможных установок выходного тока. Период состоит из 8 бит, одного стартового интервала и одного стопового интервала. Всего 10. Время передачи сигнала может меняться от одного тактового интервала – это стартовый интервал и передача кода x00. До 9 – передается код xFF. Отношение сигнала к периоду (коэффициент скважности) варьируется от 1/ 10 и до 9/ 10. Итого 9 значений выходного тока. На рисунке 3 показана зависимость выходного тока от передаваемого кода для одного байта.
2. Формирование сингулярных сигналов для создания ШИМ
Для увеличения точности необходимо сформировать такой ансамбль сигналов, что бы средний (интегральный) ток был уникальный, т. е. сингулярный. Например, рассмотрим формирование среднего тока для серии сигналов из 8 байт. Период для учета среднего тока состоит из 8 байт, это 10*8 тактовых интервалов. Получается, что градация скважности меняется от 8 /80 до 72/80 на интервале в 8 байт.
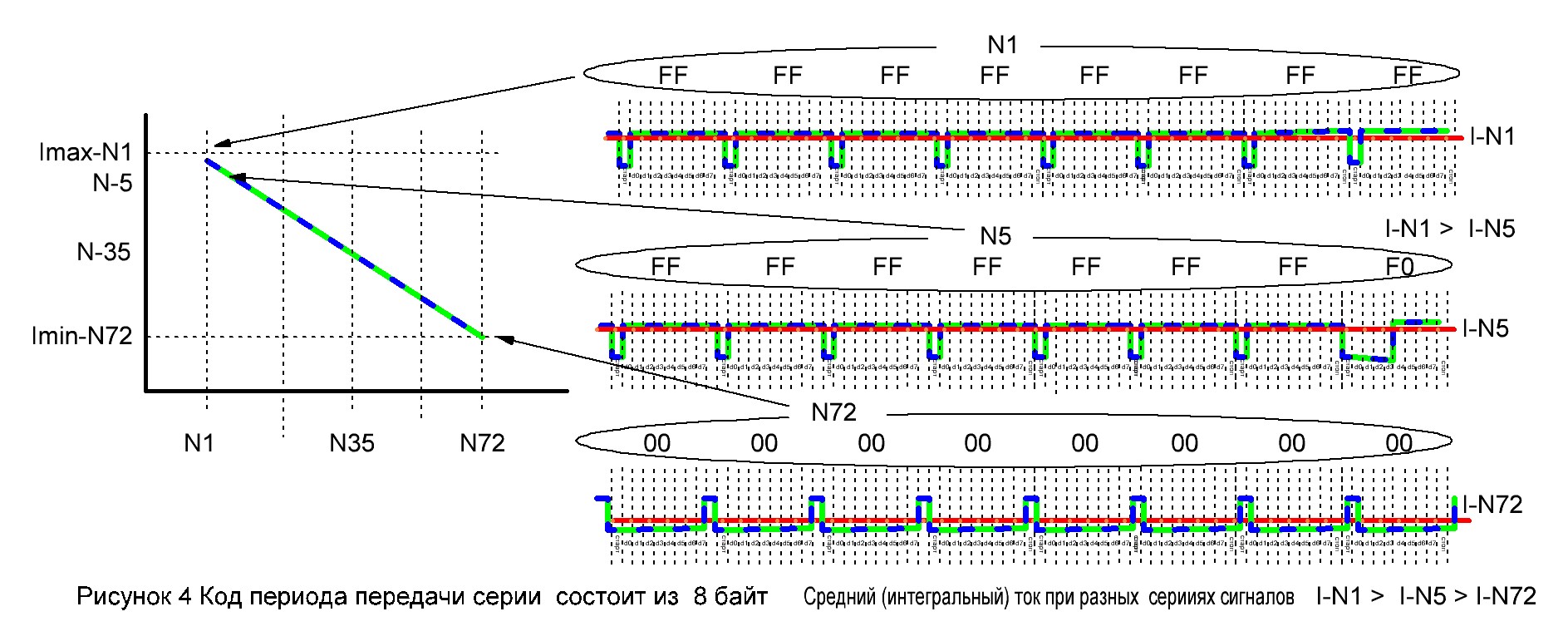
Использование серии из 8 байт увеличивает градацию среднего (интегрального) тока до 8*9=72 ступеней. А использование 80 байт в серии увеличивает градацию до 80*9=720 ступеней. Таким образом, увеличивая количество байт в серии, точность можно повысить до любой заданной разумной величины.
3. Практическая реализация метода для управления скоростью двигателя постоянного тока.

На рисунке 5 приведена схема сопряжения силового ключа с цифровым интерфейсом rs-485. Она состоит из диодов VD1 VD2, разделяющих положительный и отрицательный сигнал импульса для управления электронным ключом КТ829. Ключ открывается от положительной части импульса. Сопротивления R1 и R2 создают требуемый ток, для открытия силового ключа при положительной части импульса, и режим закрытия ключа при отрицательной части импульса.
Силовой ключ выполнен на транзисторе типа КТ829. Конденсатора С1 сглаживает импульсные пульсации электронного ключа на двигателе постоянного тока. Напряжение питание зависит от типа двигателя и возможностей транзистора и в приведенной схеме возможно до 45..100вольт в зависимости от буквы типа электронного ключа. Цифровой канал rs-485 сформирован на схеме конвертором usb-rs-485. Допускается любой другой существующий интерфейс компьютера, который формирует цифровой канал rs-485.
Программа управления для операционной системы Windows, использующая данный метод, размещена на сайте автора по адресу: http://www.shabronov.narod.ru/temp/temp/test_monsys.zip и доступна без ограничений.
Описание работы с программой приведено в [Л3] Дано управление двумя моторами постоянного тока, для решения задачи управления спортивными тренажерами.
Часть 2 Сингулярная модель управления сервоприводом
1. Сигналы cервопривода стандарта PPM (ШИМ для сервоприводов)
У сервопривода на вход подается прямоугольный импульс, длительность которого определяет угол поворота вала. Значение, через которое повторяются импульсы, в стандарте PPM – 20 миллисекунд. Длительность меняется от >1 до <2 миллисекунд. Описание стандарта приведено в [Л8]
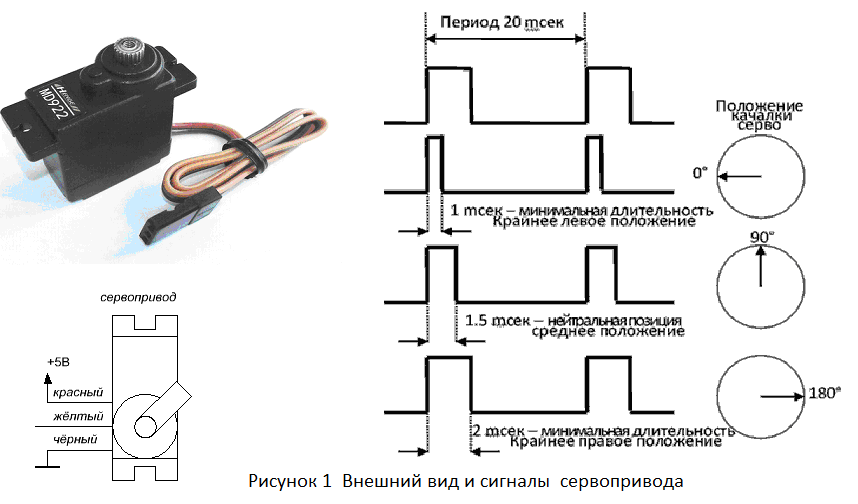
Для установки в требуемый угол необходимо сформировать сигнал с периодом 10…20 мс и требуемой длительности. Отметим, что период допускается от 10 до 20 мс, а точность импульса максимально точно определяет установку угла вала. Важно! Допускаемая погрешность периода позволяет использовать для формирования сигналов задержки операционные системы с многозадачностью. В том числе и систему Windows.
2. Формирование сингулярных сигналов для создания ШИМ
Для формирования требуемого сигнала ШИМ от rs-485 передаем коды сигнала x00 (0000-0000 битовая запись) в количестве, равном длительности требуемого импульса. Затем задаем паузу до стандартных 20мс. И снова передаем то же количество сигналов. Получаемая последовательность сигналов интегрируется RC-цепью и через компаратор, который формирует крутые фронты импульса, поступает на вход сервопривода.
На рисунке 2 приведена последовательность из 1-го и 4-х байт x00 и показано интегрированное значение тока. По оси X - отображаем время, а по оси Y - значение напряжения на выводе D - относительно корпуса. Этот вывод в исходном состоянии имеет значение логического нуля.
3. Необходимость и достаточность скорости сигналов rs-485 для создания ШИМ
Для скорости 115200 бит в секунду, длительность одной посылки кода x00 равна одному тактовому интервалу 8,6 мкс умноженному на 9. Итого 77,4 мкс. Две посылки кода x00 сформируют интегрированный импульс примерно в 160 мкс.
Точность позиционирования определяется как разница между максимальной и минимальной длительностью импульса, деленная на длительность одного передаваемого кода. Для более широких условий и разных моделей сервоприводов установим Тмин=300 мкс, Тмакс=2500 мкс. Получаем (2500-300)/77,4= 28 шагов итераций. Это означает, что сектор в 180 градусов мы можем установить в 28 позиций.
Вывод: скорости в 115200 бит в секунду достаточно, но мало для формирования сигнала ШИМ и качественного и точного управления сервоприводом.
Однако, современные USB-rs-485 адаптеры работают на скоростях до 3 мбит в секунду. Это и позволяет их использовать для формирования сигналов управления ШИМ сервоприводов [Л3],[Л4]
Например, для скорости 2 400 000 бит в секунду тактовый интервал равен 416 нс. Длительность интегрированного импульса для одного кода x00 равна 416*9= 3,7 мкс. Получаем (2500-300)/3,7= 594 шага итераций. Это означает, что сектор в 180 градусов мы можем установить в 594 позиции, т. е. менее 1-го градуса, что подходит для многих задач сервоприводов.
4. Практическая реализация интегратора для управления сервоприводом.
Схема управления сервоприводом от компьютера через порт usb представлена на рисунке 3.

Питание микросхемы интегратора, сервопривода и адаптера usb-rs-485 допускается выполнять непосредственно от USB-порта. Однако, необходимо учитывать, что максимальный потребляемый ток от USB равен 0,5 ампера. Указанные параметры RC-цепи R1,C1 соответствуют скорости сигнала 2 400 000 бит в секунду. Элементы ТТЛ логики 2и-не ИМС-1 выполняют одновременно и задачу компаратора для формирования сигнала среднего (интегрированного) тока. На выводе 6 ИМС-1 создаются импульсы с крутыми фронтами, которые поступают на вход сервопривода.
Программа управления для операционной системы Windows, использующая данный метод, размещена на сайте автора по адресу: http://www.shabronov.narod.ru/temp/temp/test_monsys.zip и доступна без ограничений.
Описание работы с программой приведено в [Л7] Дано управление сервоприводом, для решения задачи управления спортивными тренажерами.
Другие применения: управление поворотом web-камеры, управление в системах «умный дом», робототехника, игрушки и модели, тестирование различных модификаций сервоприводов и т. п.
Литература
Описание стандарта rs-485 [Электронный ресурс]. URL: http://ru. wikipedia. org/wiki/RS-485 Интерфейсы rs-485 [Электронный ресурс]. URL: http://www. bookasutp. ru/Chapter2_3.aspx Описание работы с программой управления скоростью двигателем постоянного тока URL: http://www. shabronov. narod. ru/temp/tenis_bam_v2/ Описание конверторов интерфейсов usb-rs-485. URL: http://icbcom. ru/store/converters/icb-usb-02.html Технические данные транзисторов кт-829. URL: http://lib. chipdip. ru/031/DOC001031308.pdf Адаптер usb-rs-485 используемый в схеме: http://mysku. ru/blog/ebay/21100.html Описание работы с программой управления сервоприводом URL: http://www. shabronov. narod. ru/temp/tenis_bam_v4/ Описание стандарт PPM. URL: http://www. parkflyer. ru/blogs/view_entry/2625/Дата документа: 24 апреля 2015 года г. Новосибирск
Электронный адрес: http://www. shabronov. narod. ru/temp/sibgutis_konf_2015_v1/singular_doklad. doc
Автор , аспирант кафедры ТЭ СибГУТИ, тел. +7-913-905-8839, e-mail: *****@***ru
