

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ГЛАВА 2. МЕТОДЫ ИДЕНТИФИКАЦИИ СИСТЕМ
Идентификация системы управления – это проблема, которую приходится решать на всех этапах проектирования системы и ее эксплуатации. Перед синтезом системы оптимального управления выполняется этап предварительной идентификации. Результатом идентификации являются параметры объекта управления, необходимые для синтеза оптимальных управлений.
В процессе функционирования системы ее параметры медленно (а иногда, и не очень медленно) меняются с течением времени из-за старения, изменения температурных условий, износа и т. д., и система перестает быть оптимальной. Кроме того, параметры объекта управления, определенные в процессе предварительной идентификации, найдены с некоторой погрешностью, зависящей от метода идентификации, помех измерения, возмущений и т. д., что также выводит систему из оптимального режима. Для повышений эффективности системы управления в нее вводится идентификатор объекта управления, который производит текущую оценку параметров объекта, используемых для коррекции параметров регулятора.
В главе рассматриваются некоторые методы идентификации линейных и нелинейных систем.
2.1. Каноническое представление системы
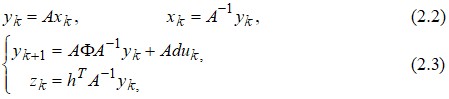
Рассмотрим линейную дискретную динамическую систему (1.94) со скалярным входом uk и скалярным выходом zk. Допущение о скалярности входа и выхода сделаны только для упрощения выкладок. Результаты, полученные для скалярных входа и выхода, достаточно просто распространяются на случай векторного сигнала.

где: xk – вектор состояния размерности n на шаге k,
uk – скалярное входное воздействие на шаге k,
zk – скалярное измерение на шаге k,
Φ, d, h – матрицы коэффициентов, размерности,
соответственно, n*n, n*m и n*k.
Решение задачи идентификации подразумевает нахождение описания, эквивалентное исходному описанию объекта (2.1). Выше были рассмотрены преобразования эквивалентности, позволяющие построить множество систем, эквивалентных по входу и выходу, поэтому такая постановка задачи идентификации не является однозначной (так как непонятно, какую из эквивалентных систем надо искать).
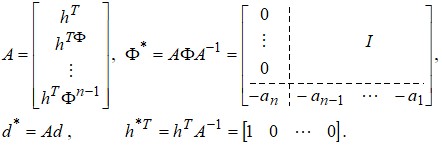
К счастью, можно однозначно построить эквивалентную систему, если использовать в качестве матрицы преобразования матрицу наблюдаемости (понятно, что преобразуемая система должна быть наблюдаемой). Эквивалентное представление системы, полученное с помощью такой матрицы преобразования, называется каноническим представлением. (Вообще говоря, такое представление в литературе называется первым каноническим представлением. Второе каноническое представление получается при использовании в качестве матрицы преобразования матрицы управляемости. Мы будем использовать только первое каноническое представление, которое будем называть просто каноническим.)
Запишем это представление, учитывая полученные ранее соотношения (1.106), (1.107):
или

где:
Путем несложных (но достаточно нудных) алгебраических выкладок каноническое представление (2.4) может быть преобразовано в эквивалентное разностное уравнение:
 где коэффициенты b1, …, bn определяются из соотношения
где коэффициенты b1, …, bn определяются из соотношения

Представление (2.5) удобно тем, что в нем вообще отсутствуют переменные состояния, которые, как мы выяснили, не являются однозначным признаком системы. В этом представлении присутствуют только входная и выходная переменные, которые являются неизменной принадлежностью любой системы. Если измеряемый выход системы векторный, то вместо одного уравнения получится система уравнений, количество которых будет равно размерности измеряемого выхода. Если векторным является входной сигнал, то изменится лишь правая часть уравнения (или уравнений) – в ней появятся слагаемые со всеми компонентами входного сигнала. Вывод таких уравнений, конечно, будет существенно более длинным, но не более сложным.
Контрольные вопросы к разделу 2.1
Что такое каноническое представление системы? Сколько можно построить канонических представлений относительно наблюдения? Можно ли построить каноническое представление для ненаблюдаемой системы? Можно ли построить каноническое представление для неуправляемой системы? Является ли каноническое преобразование взаимно однозначным?2.2. Идентификация линейной детерминированной
системы
Рассмотрим свободную динамическую систему

Обозначения в (2.7) те же, что и в (2.1). Необходимо определить, при каких условиях можно идентифицировать систему (2.7), используя только измерения zk. Под идентификацией системы (2.7) мы будем понимать нахождение такой пары Φ*, h*, что система

была бы эквивалентна системе (2.7) по выходу. Идентификация системы с входными сигналами будет рассмотрена позже.
Прежде, чем решать поставленную задачу идентификации, рассмотрим более простой случай. При каких условиях можно определить матрицу Φ в (2.7) по наблюдениям вектора состояния xk? Для решения этой задачи запишем первое уравнение (2.7) для n шагов:

В матричной форме эти соотношения можно записать следующим образом:

где ![]() - матрица идентифицируемости.
- матрица идентифицируемости.
Из выражения (2.11) видно, что матрица Φ может быть однозначно определена, если матрица В неособая. В этом случае:
![]()
Система, для которой матрица идентифицируемости В неособая, называется n-идентифицируемой. Название следует из того, что идентификация системы производится по измерениям n-мерного вектора состояния.
Вернемся теперь к решению исходной задачи идентификации системы по измерениям выхода z. Рассмотрим вектор, составленный из измерений:

Из уравнения (2.7) следует:
где  – матрица наблюдаемости для системы (2.7).
– матрица наблюдаемости для системы (2.7).
Аналогично:
![]()
Продолжая до 2n-1, получаем:
![]()
Здесь матрица
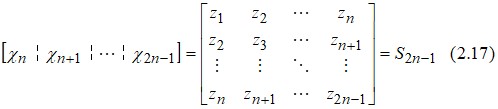
составлена только из измерений z и, как видно из (2.17), симметрична.
Учитывая (2.17), соотношение (2.16) можно записать в виде:
![]()
Из (2.18) видно, что матрица Φ принципиально может быть найдена, если матрицы А и В неособые:
![]()
Таким образом,, матрица Φ может быть найдена, если исходная система является наблюдаемой (матрица А неособая) и n-идентифицируемой (матрица В – неособая). Такую систему называют 1-идентифициремой (так как идентификация производится по измерениям одномерного выходного сигнала). На самом деле из (2.19) нельзя найти Φ, так как в матрицы А и В входит сама неизвестная матрица Φ.
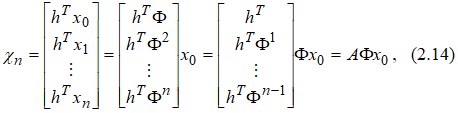
Попробуем, все же, решить задачу идентификации системы по измерениям одномерного выхода. Для этого рассмотрим соотношение (2.14):
![]()
Матрица Φ всегда неособая, так как она по определению является фундаментальной матрицей, а матрица А неособая, так как исходная система предполагается наблюдаемой (идентифицировать ненаблюдаемую систему не имеет смысла), поэтому:
![]()
Подставив (2.20) в (2.15), получим:
![]()
или ![]()
где Φ*=АΦА-1 – матрица канонического представления системы.
Выписав уравнение (2.21) n раз для последовательных векторов χ, получим:
![]()
или, учитывая обозначение (2.18),
![]()
Из соотношения (2.18) видно, что матрица S2n-1 неособая, если исходная система наблюдаема и n-идентифицируема (она равна произведению трех неособых матриц), поэтому:
![]()
Таким образом, поставленная выше задача решена – основываясь только на измерениях выхода z, может быть найдена матрица Φ*, представляющая каноническую реализацию исходной системы (2.7). Найденная система (2.8) эквивалентна исходной системе (2.7) по выходу, а ее вектор состояния yk связан с вектором состояния исходной системы xk соотношением (2.2). Матрица h* системы (2.8) связана с матрицей h исходной системы соотношением
![]()
Контрольные вопросы к разделу 2.2.
Формулировка задачи идентификации. Что такое n-идентификация? Что такое 1-идентификация? Можно ли идентифицировать ненаблюдаемую систему? Физический смысл условия идентифицируемости. Сколько измерений необходимо для идентификации системы n-го порядка?2.3. Идентификация линейной стохастической
системы
Рассмотрим систему, на вход которой действует случайное возмущение

где wk – случайная последовательность, которая не может быть измерена. В соответствии с (2.3) перейдем от системы (2.25) к ее каноническому представлению

Здесь все обозначения соответствуют (2.3), а ![]()
От канонического представления (2.26) перейдем к разностному уравнению (2.5):
 связь параметров уравнения (2.27) с параметрами исходной системы дают соотношения (2.5). Уравнение (2.27) можно записать в более компактном виде:
связь параметров уравнения (2.27) с параметрами исходной системы дают соотношения (2.5). Уравнение (2.27) можно записать в более компактном виде:
![]()
![]()
где: 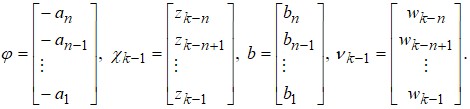
Так как уравнения (2.25) и (2.28) эквивалентны по входу и выходу, для решения задачи идентификации достаточно найти параметры уравнения (2.28). Таким образом, задача идентификации сводится к нахождению вектора φ, размерность которого равна n. Решение задачи начнем с простейшего случая, распространив его затем на более общий вид.
Рассмотрим случай b1=1, b2=b3=…=bn=0
Так как возмущение wk не измеряется, приравнивание b1 единице не снижает общности задачи. Для этого случая уравнение (2.28) примет вид
![]()
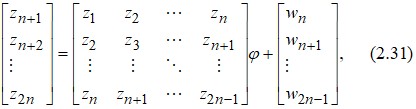
Запишем уравнение (2.29) для 2n измерений (напомним, что n – размерность вектора φ).
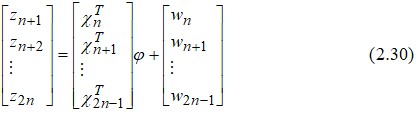
или
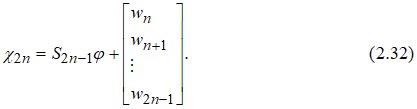
Выше уже было показано, что матрица S2n-1 неособая, если исходная система наблюдаема и n-идентифицируема. Тогда из (2.32) можно определить вектор φ:
Второе слагаемое в (2.33) не может быть измерено. Оно представляет собой случайную ошибку идентификации вектора φ. Если бы случайные возмущения отсутствовали, выражение
![]()
давало бы точное выражение для вектора φ. При наличии случайных возмущений это выражение дает оценку вектора φ с ошибкой, обусловленной действием этих возмущений.
Для уточнения оценки вектора φ необходимо использовать дополнительные измерения z и использовать итеративные алгоритмы идентификации. Для построения такого алгоритма будем искать оценку вектора φ из условия минимума функционала

В критерии (2.35) минимизируется средний квадрат невязки (ошибки) между измерениями zi и оценками этих измерений, даваемыми уравнением модели
![]()
которая строится без учета случайных возмущений wi.
Рассмотрим первые n измерений, начиная с n+1:

Оценку ![]() ищем из условия
ищем из условия

(При этом имеем в виду, что  ):
):
Отсюда легко получается выражение для оценки вектора параметров системы ![]() :
:

Введем обозначение (оно понадобится в дальнейшем):
![]()
С учетом этого обозначения получаем окончательное выражение для оценки вектора параметров системы после 2n измерений:
![]()
Добавим новое измерение z2n+1. Теперь уравнение модели (2.32) перейдет в уравнение
Повторив ту же процедуру вывода, получим выражение для оценки ![]() :
:

где
Выражение (2.46) имеет одну неприятную особенность – оно требует обращения матрицы ![]() , что, вообще говоря, в реальном времени выполнить трудно. К счастью, используя лемму об обратных матрицах, можно избежать этой процедуры. Лемма выглядит следующим образом:
, что, вообще говоря, в реальном времени выполнить трудно. К счастью, используя лемму об обратных матрицах, можно избежать этой процедуры. Лемма выглядит следующим образом:

Преимущество выражения (2.47) состоит в том, что, если известно предыдущее значение матрицы Р, вычисление последующего значения не требует обращения матрицы, вместо этого производится деление на число. Подставляя P2n+1 в (2.45), получим выражение для оценки ![]() :
:
![]()
![]()
Повторяя ту же процедуру многократно, получим рекуррентные соотношения для пошагового вычисления оценки вектора параметров системы:

Соотношения (2.49) и (2.50) справедливы для любых значений k, начиная с 2n+1. Начальными условиями для этих соотношений являются значения

В первом уравнении (2.51) учтено, что матрица S2n-1 квадратная и симметричная.
Алгоритм идентификации (2.49), (2.50) и (2.51) использует только измерения выхода zk и требует только однократного обращения матриц для вычисления P2n. После этого обращение матриц не требуется, и вычисления по формулам (2.49) и (2.50) легко могут быть реализованы в реальном времени.
Если случайное возмущение является гауссовым с нулевым математическим ожиданием и некоррелированным, то есть,

то алгоритм (2.49) – (2.51) дает асимптотически несмещенную и состоятельную оценку [8], то есть,

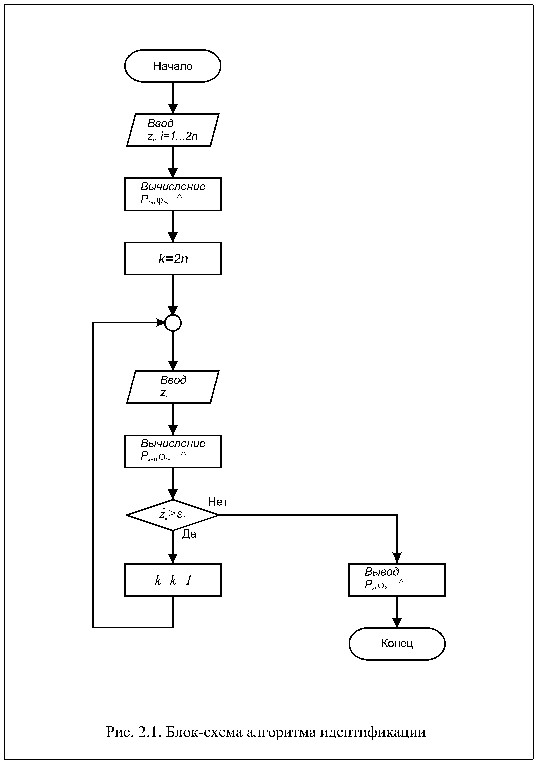
Блок-схема алгоритма идентификации (2.49) – (2.51) приведена на рис. 2.1. На блок-схеме обозначено:
![]()
Выражение (2.56) представляет собой ошибку идентификации. Она оценивается косвенно по разности между измерением zk+1 и его оценкой ![]() , предсказанной по модели (2.36). ε0 – заданное значение ошибки идентификации.
, предсказанной по модели (2.36). ε0 – заданное значение ошибки идентификации.
Рассмотрим общий случай
Вектор b имеет размерность m, m ≤ n (условие физической реализуемости). В этом случае система описывается уравнением:
![]()
где
Так как возмущения wk не измеряются, а компоненты вектора b в общем случае неизвестны, уравнение (2.57) можно записать в виде:
![]()
где ![]() – эквивалентное скалярное возмущение.
– эквивалентное скалярное возмущение.
Уравнение (2.58) имеет тот же вид, что и (2.29), но возмущение Ωk-1 в отличие от wk-1 коррелировано. Запишем эквивалентное возмущение Ω для m+1 последовательных шагов:
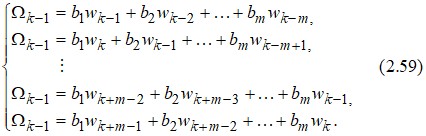
Из уравнений (2.59) видно, что эквивалентное возмущение Ωk коррелировано на n шагах. То есть, Ωk-1, Ωk,… Ωk+m-2, коррелированы (так как содержат одинаковые компоненты wi), но Ωk-1 и Ωk+m-1, - некоррелированы (не содержат одинаковых компонентов wi). Следовательно, если выбирать Ω через m шагов, то полученная последовательность будет некоррелированной. Следовательно, алгоритм идентификации, полученный выше, будет работоспособен и даст асимптотически несмещенную и состоятельную оценку, если измерения z выбирать через m шагов. Уравнения для этого случая будут иметь вид:
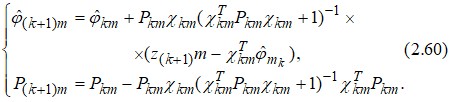
Начальные условия для алгоритма (2.60) вычисляются аналогично (2.51), но с учетом необходимости использования некоррелированных измерений:

Измерения для (2.61) выбираются через m шагов:
Алгоритм идентификации (2.60), (2.61) в принципе работоспособен, но предложенная методика выборки измерений может непомерно затянуть процесс идентификации.
Контрольные вопросы к разделу 2.3
Переход от одношаговой задачи идентификации к многошаговой. Каков критерий идентификации стохастической системы? Почему в качестве критерия идентификации рассматривается квадрат нормы разности выхода и его оценки? Что такое лемма об обратной матрице? Что дает лемма об обратной матрице? Что такое несмещенная оценка? Что такое состоятельная оценка? Что будет с оценкой вектора параметров, если возмущения будут коррелированными? Что такое эквивалентное возмущение? Что такое интервал корреляции? Каковы начальные условия для рекуррентного алгоритма идентификации?2.4. Идентификация линейной системы, на вход которой
действует возмущение и сигнал управления
Рассмотрим линейную динамическую систему

где d, Г, h – n-мерные векторы,
uk – управляющее воздействие, которое может быть измерено,
wk – гауссово случайное возмущение, удовлетворяющее (2.52),
(2.53), которое не может быть измерено,
zk – скалярный измеряемый выход.
Необходимо найти наилучшую оценку Ф, d в классе линейных моделей.
Для решения задачи, как и ранее, перейдем от (2.62) к разностному уравнению:

или
![]()
где:
Иначе можно записать:
![]()
где:
Это уравнение совпадает с уравнением (2.57) – в вектор χ* входят только измеряемые величины, а в вектор φ* – параметры, которые необходимо найти. Отличается новое уравнение только размерностью вектора параметров φ*, который имеет теперь вдвое большую размерность. Решение задачи идентификации будет описываться уравнениями, аналогичными (2.60), (2.61):
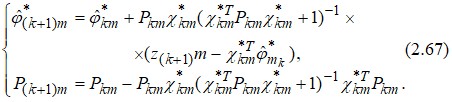
![]()
Уравнение (2.67) справедливо для k больших 4mn, так как размерность вектора ![]() теперь 2n. Значение m выбирается из условия некоррелированности эквивалентных возмущений νTkb на соседних шагах. Начальные условия для алгоритма (2.67) вычисляются аналогично (2.61).
теперь 2n. Значение m выбирается из условия некоррелированности эквивалентных возмущений νTkb на соседних шагах. Начальные условия для алгоритма (2.67) вычисляются аналогично (2.61).
Контрольные вопросы к разделу 2.4
Как изменяется задача идентификации при наличии сигналов управления? Что такое расширение размерности задачи? Насколько увеличивается интервал, необходимый для получения приемлемой оценки?2.5. Идентификация линейной системы при входном
возмущении с неизвестным средним
Алгоритмы идентификации, полученные выше, дают асимптотически несмещенную оценку только при случайных возмущениях с нулевым средним. Если математическое ожидание возмущения неизвестно, надо либо определить значение этого математического ожидания, либо исключить его влияние на вычисляемые оценки.
Рассмотрим случай, когда wk имеет ненулевое математическое ожидание. Тогда уравнение (2.66) можно записать иначе:
![]()
где:
![]() – математическое ожидание эквивалентного возмущения,
– математическое ожидание эквивалентного возмущения,
![]() – эквивалентное коррелированное возмущение с нулевым математическим ожиданием,
– эквивалентное коррелированное возмущение с нулевым математическим ожиданием,
![]()
При идентификации системы, описываемой уравнением (2.68) возможны два пути.
1. ![]() необходимо найти
необходимо найти
Перепишем уравнение (2.68) в несколько измененном виде:
![]()
где:
Значение ![]() , которое необходимо найти, включено в вектор параметров, который ищется при идентификации. Уравнение (2.69) имеет тот же вид, что и (2.66), следовательно, для идентификации (2.69) пригоден алгоритм (2.67) с учетом приведенных выше нововведений:
, которое необходимо найти, включено в вектор параметров, который ищется при идентификации. Уравнение (2.69) имеет тот же вид, что и (2.66), следовательно, для идентификации (2.69) пригоден алгоритм (2.67) с учетом приведенных выше нововведений:
Уравнение (2.70) справедливо для k больших, чем 2m(2n+1), так как размерность вектора φ** теперь равна 2n+1.
2. ![]() искать не надо
искать не надо
Определим новую переменную
![]()
Тогда из (2.68) получим
![]()
или
![]()
где:
Уравнение (2.73) имеет тот же вид, что и (2.66), следовательно, для идентификации пригоден алгоритм (2.67) с соответствующими изменениями:
Уравнения (2.74) справедливы для k больших 4n(m+1), а шаг выборки теперь m+1, так как интервал корреляции ![]() увеличился на один шаг, как это видно из (2.73).
увеличился на один шаг, как это видно из (2.73).
Контрольные вопросы к разделу 2.5
К чему приводит ненулевое среднее возмущений? К чему может привести переход от измерений выхода к их разности? Насколько увеличивается размерность задачи при необходимости определения среднего значения эквивалентного возмущения? Насколько увеличивается размерность задачи, если среднее значение эквивалентного возмущения определять не надо? Насколько увеличивается интервал, необходимый для получения приемлемой оценки, при ненулевом среднем эквивалентного возмущения?