
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
df=m1·(Z-3) = (59-3)·0.3 = 16.8мм
b= шbm·m1 = 4·0.3 = 1.2 мм
Колесо 5d1=m1·Z = 59·0.3 = 17.7мм
da=m1·(Z+2) = (59+2)·0.3 = 18.3мм
df=m1·(Z-3) = (59-3)·0.3 = 16.8мм
b= шbm·m1 = 4·0.3 = 1.2 мм
Делительное межосевое расстояние:
a1=0.5·m1·(Z1+Z2) = 0.5·0.3∙(18+59) = 11.55мм
a2=0.5·m2·(Z3+Z4) = 0.5·0.3∙(18+59) = 11.55мм
a3=0.5·m3·(Z5+Z6) = 0.5·0.3∙(18+59) = 11.55мм
a4=0.5·m4·(Z7+Z8) = 0.5·0.3∙(18+59) = 11.55мм
a5=0.5·m5·(Z7+Z8) = 0.5·0.3∙(18+59) = 11.55мм
№ колеса | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
d1 | 5.4 | 17.7 | 5.4 | 17.7 | 5.4 | 17.7 | 5.4 | 17.7 | 5.4 | 17.7 |
da | 6 | 18.3 | 6 | 18.3 | 6 | 18.3 | 6 | 18.3 | 6 | 18.3 |
df | 4.5 | 16.8 | 4.5 | 16.8 | 4.5 | 16.8 | 4.5 | 16.8 | 4.5 | 16.8 |
b | 1.35 | 1.2 | 1.35 | 1.2 | 1.35 | 1.2 | 1.35 | 1.2 | 1.35 | 1.2 |
aщ | 11.55 | 11.55 | 11.55 | 11.55 | 11.55 |
6. Расчет валов и опор редуктора
Расчет валов
Для расчёта диаметров вала согласно [1] будем использовать следующую формулу:
 , где
, где
Мкр - момент, действующий на вал [Н·мм];
[у] – допускаемое напряжение для выбранного материала [МПа].
Значение [у] зависит от характера нагрузки и определяется соотношением:
![]() , где
, где
у-1 – предел выносливости материала при симметричном цикле;
n – коэффициент запаса, назначаем n=1.5 (по характеру работы привода).
Назначаем значение n = 1.5 из рекомендуемого интервала.
В качестве материала для валов выбираем сталь 40Х после улучшения.
Характеристики: у-1 = 380 МПа,
HB = 280,
G = 1,5М105 МПа,
[уи]=294,3 МПа
![]()
№ вала Параметр | 6 | 5 | 4 | 3 | 2 | 1 |
Mкр, Н∙мм | 3750 | 1190 | 378 | 112 | 35.6 | 11.3 |
d, мм | 3.98 | 3.59 | 2.42 | 1.63 | 1.10 | 0.34 |
Из технологических соображений назначаем диаметры валов из стандартного ряда по ГОСТ 12081-72:
№ вала Параметр | 6 | 5 | 4 | 3 | 2 | 1 |
Mкр, Н∙мм | 3750 | 1190 | 378 | 112 | 35.6 | 11.3 |
d, мм | 4.0 | 4.0 | 3.0 | 3.0 | 3.0 | 3.0 |
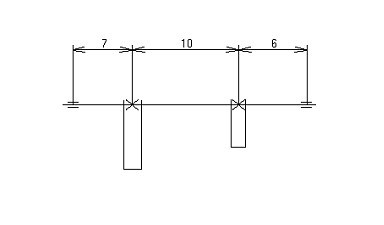
Расчет вала на жесткость
Исходные данные:
Крутящий момент 1250,00 Н*мм
Угол в плане 180,00 °
Число зубьев первого колеса 59
Модуль первого колеса 0,30
Число зубьев второго колеса 18
Модуль второго колеса 0,30
Материал 40Х (улучшенная)
Допускаемые напряжения 126,67 МПа
Силы в зацеплениях:
P1 = 40,12 H P2 = 132,16 H
R1 = 14,60 H R2 = 48,10 H
Проекции сил в зацеплениях на оси координат:
FX1 = -40,12 H FX2 = -132,16 H
FY1 = 14,60 H FY2 = -48,10 H
Реакции в опорах:
X1 = 60,44 H X2 = 111,84 H
Y1 = 1,84 H Y2 = 31,66 H
Диаметры и длины конструктивных ступеней вала (в мм):
Длина Диаметр
4,00 3,0
9,00 3,0
9,00 3,0
15,00 3,0
20,00 4,0
24,00 4,0
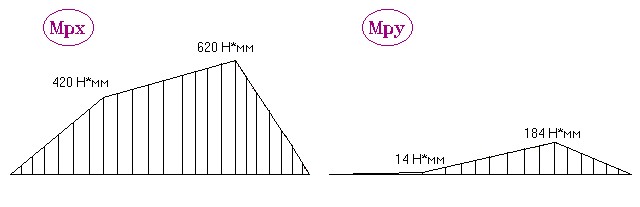
Расчёт на жёсткость:
Прогиб в первом колесе:
Максимально допускаемый 0,009000 мм
Реальный 0,005387 мм
Прогиб во втором колесе:
Mаксимально допускаемый 0,009000 мм
Реальный 0,003145 мм
Масса валика 2,64 гр
Расчет шарикоподшипников
Поскольку в разрабатываемой конструкции присутствует только радиальная нагрузка на валы, то выбираем радиальные шарикоподшипники.
Расчет будем вести по динамической грузоподъёмности CP, используя следующую формулу:
![]() , где
, где
P – эквивалентная динамическая нагрузка:
![]() , где
, где
Fa – осевая нагрузка на валы
Fa =0
Fr – радиальная нагрузка на валы
V – коэффициент вращения
V =1, т. к. вращается внутреннее кольцо
X – коэффициент радиальной нагрузки
X = 1
Y – коэффициент осевой нагрузки
Y = 0
Kб – коэффициент безопасности
Kб = 1, считаем, что работа спокойная, без толчков
Kт – температурный коэффициент
Kт = 1,05, т. к. рабочая температура не превышает 125 °С
P=250 Н, эквивалентная динамическая нагрузка;
n= 20 об/мин, частота вращения вала;
Lh=500 ч, долговечность.
Получим
P=250 Н
CP = 210.858 Н.
Исходя из полученных данных, используя справочные таблицы [2], выберем радиальный однорядный шарикоподшипник (ГОСТ 8338-75) со следующими параметрами:
Условное обозначение: 1000085 (легкая серия диаметров);
Диаметр внутреннего кольца 5 мм;
Диаметр наружного кольца 11 мм;
В =3 мм; r =0,3 мм; DW =1,588 мм.
Точностной расчет разрабатываемой кинематики
Должно выполняться условие:
![]() , где
, где
ΔΣ-погрешность передачи;
![]() =20’ – заданная погрешность передачи.
=20’ – заданная погрешность передачи.
Погрешность передачи состоит из кинематической погрешности и погрешности мёртвого хода.
![]()
Назначим для рассчитываемого ЭПМ 7-ю степень точности и вид сопряжения – G.
Найдём максимальною кинематическую погрешность по формуле:
![]() , где
, где
Значения ![]() и
и ![]() рассчитывают по формуле:
рассчитывают по формуле:
![]() , где
, где
![]() -допуск на накопленную погрешность шага зубчатого колеса;
-допуск на накопленную погрешность шага зубчатого колеса;
![]() -допуск на погрешность профиля зуба;
-допуск на погрешность профиля зуба;
K - коэффициент фазовой компенсации.
Исходные данные для расчёта:
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
i=1,8 | i=1,8 | i=1,9 | i=1,9 | i=2,1 | |||||
K = 0,85 | K=0,85 | K=0,85 | K=0,85 | K=0,83 | |||||
Ks = 0,76 | Ks =0,76 | Ks =0,76 | Ks =0,76 | Ks =0,75 | |||||
a=22 | a=22,8 | a=22,8 | a=23,6 | a=24,4 | |||||
fa=16 | fa=16 | fa=16 | fa=16 | fa=16 | |||||
Z=18 | Z=55 | Z=18 | Z=55 | Z=18 | Z=55 | Z=18 | Z=55 | Z=18 | Z=58 |
d1=16 | d1=28 | d1=16 | d1=29,6 | d1=16 | d1=29,6 | d1=16 | d1=31,2 | d1=16 | d1=32,8 |
EHS=14 | EHS=16 | EHS=14 | EHS=16 | EHS=14 | EHS=16 | EHS=14 | EHS=16 | EHS=14 | EHS=18 |
TH=28 | TH=32 | TH=28 | TH=32 | TH=28 | TH=32 | TH=28 | TH=32 | TH=28 | TH=32 |
|
|
|
|
|
|
|
|
|
|
![]() =0.85*(31+31)=52.7мкм.
=0.85*(31+31)=52.7мкм.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
