Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Районная конференция «Первые шаги в науку»
Секция Информатика
Роботы в нашей жизни.
Выполнил:
Воронков Роман,
ученик 6 «А» класса
МБОУ СОШ № 42 с углубленным изучением отдельных предметов
железнодорожного района
г. о. Самара
Научный руководитель:
учитель математики
Самара, 2014 год
Оглавление
Введение……………………………………………………………………3
Глава 1. Робот – кто же это?……………………………………………….4
Глава 2. Истрия появления роботов……………………………...……..5-8
Глава 3. Классификация роботов………………………………………9-10
Глава 4. Как устроены роботы и кто ими управляет………………….
Глава 5. Конструирование рабочей модели робота……….………….
Глава 6. Интерпретация результатов анкетирования.………..
Заключение……………………………………………………………
Список литературы……………………………………………………...
Сноски ……………………………………………………………………
Приложение………………………………………………………………
Приложение . ………………………………………………
Приложение .
Приложение .
Приложение . ………………….
Приложение . …………………………………
Приложение . …………………………………………
Приложение . ………………………………………
Приложение . ……………………………………...
Приложение . ………………………………………
Введение.
Тема роботов меня интересует давно. Я видел много фильмов и передач про роботов. Я часто слышу слова «робототехника», «нанотехнологии», но в жизни мне пока не приходилось сталкиваться с настоящими роботами и я решил заняться исследованием области применения робототехнических устройств. Мне было интересно выяснить где и как их используют, какая польза от участия роботов в жизни людей и может ли человек обойтись без роботов. У меня появилась мечта сделать робота своими руками. В связи с этим фактом, основной целью работы мы определили исследовать изучение влияния роботов на жизнь человека.
Из цели работы вытекают следующие задачи:
- найти информацию о роботах; изучить область применения роботов; провести анкетирование среди одноклассников и выяснить, что им известно о роботах, приходилось ли им сталкиваться в своей жизни с настоящим роботом; сделать своего робота.
При работе над докладом я пользовался следующими методами исследования: изучение литературы на данную тему, анкетирование, поиск информации в интернете, обобщение и анализирование полученной информации.
Изучение данного направления для меня – это, прежде всего реальная возможность стать специалистом в этой области, которая в данный момент востребована и актуальна.
Глава 1. Робот – кто же это?
Чтобы дать определение я воспользовался энциклопедией и вот что узнал:
Ромбот (чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое устройство, созданное по принципу живого организма. Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животными). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
Термин «робот» было придумано чешским писателем Карелом Чапеком и его братом Йозефом и впервые использован в пьесе Чапека "Россумские Универсальные Роботы" в 1920 г. 1
Робот (по Ожегову) - автомат, осуществляющий действия, подобные действиям человека. 2
Роботы – это необычный тип машин, которые сконструированы таким образом, чтобы выполнять сложные виды работ самостоятельно – без участия человека. Роботы способны выполнять многие «человеческие» работы намного лучше, чем мы с вами. Они очень выносливые, могут работать сутками без сна и отдыха, им не нужно есть и пить. Если попоробовать составить список работ, которые выполняют роботы, то получится целая книга. Множество роботов трудится на заводах и фабриках, товарных складах и производственных предприятиях. Они толкают, тянут, поднимают, закручивают, прессуют, вытягивают, распыляют краску, пилят, сверлят, размещают и расставляют в определенном порядке самые разные материалы и предметы. Так роботы производят изделия, которыми мы пользуемся каждый день, - от карандашей до автомобилей.
1 С чегo начинаются роботы. – стр. 23
2, Шведова словарь русского языка. – стр. 680
Глава 2. История появления роботов.
История появления первых роботов уходит в далекое прошлое. До наших дней сохранилось множество образцов механических роботов, выполненных по образцу и подобию человеческому и предназначенных для увеселения светской публики XVII—XVIII вв. Эти роботы не умели совершать никакой полезной работы, а только пели, танцевали, издавали какие-либо звуки или причудливым образом двигались. Первого
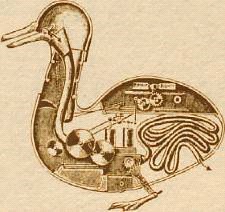
(Рис.1) робота — андроида, играющего на флейте, — создал в 1738 году французский механик и изобретатель Жак де Вокансон. Флейтист — фигура в рост человека, внутри которой устроены были пружины и механизмы, проводившие воздух в различные части механизма так, что губы автомата и его пальцы совершали правильные движения по флейте. Он также изготовил механических уток, которые, как говорят, умели клевать корм и махать крыльями 3 (рис.1).
Изучая вопрос появления роботов у меня складывалось впечатление, что эпоха роботов в массовом сознании ассоциируется только с Азимовым. В наше время имя Айзека Азимова у всех на слуху. Почему - понятно. Он наш современник. Мы читаем его произведения, смотрим фильмы, снятые по мотивам его творчества. Я ни в коей мере не пытаюсь принизить вклад этого человека в "роботизацию" общественного мышления. То что было до него сейчас малоизвестно и непопулярно, но я хочу напомнить о людях, которые жили до нас, которые интересовались роботами и продвигали их развитие в соответствии с теми возможностями, которые были в их эпоху. Сделали они немало.
Для меня очень интересным было узнать появление термина «андроид».
__________________________________________________________________
3 Сайт Интернет androbots. ru›istoriya…proishozdenie_vidov. php
Около двухсот лет тому назад разговоры о механическом человеке, который умеет писать и рисовать можно было слышать везде и всюду в Западной Европе. Механические люди швейцарского часовщика Пьера-Жака Дро и его сына Анри вызывали всеобщее удивление. О них много говорили и писали. Чтобы на них посмотреть, целые толпы прибывали в Шо де Фон, швейцарскую деревню на границе с Францией, где жили и работали Дро. Однажды Пьер Дро задумал сделать механизм, похожий на человека и совершающий человеческие движения. Это был дерзкий замысел мастера, который почувствовал свою власть над колесиками и рычажками. Чтобы построить механического человека, нужно было обладать тонким знанием механики и огромной изобретательностью. И тем не менее Дро горячо принялся за ее разрешение. Двадцать месяцев продолжалась упорная работа. В 1770 году появился на свет первый механический человек. Это был механический «пишущий мальчик» (рис. 2). Писец был ростом с пятилетнего ребенка. Он сидел на скамейке перед столиком, а весь приводной механизм размещался внутри куклы, отчего она выглядела еще изящнее. В правой руке маленького механического человека было гусиное перо (в те времена стальных перьев еще не знали). Писец макал перо в стоящую перед ним чернильницу и писал разные слова и даже фразы без всякого участия человека. Буквы были крупные, красивые, даже с нажимом и располагались в ровные строчки. Между словами оставлялись промежутки. Здесь на французском языке написано: «Своему родному городу. Жак Дро» (Рис.2)

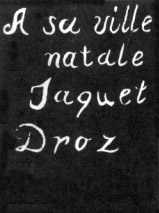
Когда механический человек писал, он двигал головой, и казалось, следил за тем, что пишет. Окончив работу, писец посыпал лист бумаги песком для высушивания чернил, а потом стряхивал его. По чистой случайности «пишущий мальчик» и часть его «рукописей», а также и другие изобретения отца и сына Дро сохранились до наших дней. После долгих странствий сейчас они находятся в Швейцарии, в музее изящных искусств города Невшателя. За работой над изготовлением «пишущего мальчика» наблюдал шестнадцатилетний сын Пьера Дро — Анри. Мальчик унаследовал от отца исключительную способность к механике и через три года сам принялся за постройку нового механического человека, который по замыслу должен был рисовать. По размеру рисовальщик был таким же, как и его «старший брат». В процессе работы рисовальщик останавливался, как бы созерцая нарисованное, а также иногда сдувал с листа бумаги соринки. Спустя некоторое время оба механика, отец и сын Дро, занялись вместе изобретением и постройкой третьего механического человека — музыкантши (рис. 3). По сложности она намного превосходила своих «братьев». Эта кукла играла на фисгармонии, ударяя пальцами по клавишам. Перед началом игры музыкантша осматривала ноты и делала рукой некоторые предварительные движения. Кроме того, она поворачивала голову и глаза, как бы следя за положением рук. Окончив игру, музыкантша наклоняла голову, благодаря слушателей за одобрение.
(Рис.3)

Свои изобретения Пьер и Анри Дро в 1774 году демонстрировали на выставке в Париже. Движения всех трех механических людей были так естественны, что многие из зрителей готовы были их считать живыми людьми. И только когда Дро открывали со стороны спины сложный часовой механизм своих творений, зрители начинали верить, что перед ними находятся действительно произведения техники, а не живые существа.
С тех пор подобные автоматы стали называть андроидами в честь молодого талантливого изобретателя механических людей — Анри Дро.
Однако «звездный час» механических помощников человека настал только в XX веке. Развитие и распространение роботов стало возможным по мере совершенствования вычислительной техники. После изобретения в 1940 году компьютера, стали появляться электронные промышленные роботы. Первым роботом, освободившим человека от трудной и опасной работы, в 1962 году стал робот «Юнимейт». Он работал на автомобильном заводе «Дженерал моторс», его работа заключалась в передаче и перемещении горячих деталей после их изготовления.
Глава 3. Классификация роботов.
Анализируя литературные источники по данной теме, я разработал свою классификацию роботов.
Производственные роботы – это роботы, предназначенные для выполнения тяжелой, монотонной, вредной и опасной для здоровья людей физической работы.4 Виды производственных роботов представлены в таблице 1:
Таблица 1.
Виды | Применение | Примеры |
Промышленные | автоматизация всех видов ручных и транспортных операций в различных отраслях промышленности | манипуляторы, роботы для покраски, сборки деталей, сварки, резки металла |
Сельскохозяйственные | автоматизация трудоемких и монотонных процессов в сельском хозяйстве | полевые роботы, роботы для подстрижки овец, роботы - косилки |
Транспортные | автоматизация управления различными транспортными средствами. | самоходные тележки, шагающие аппараты, автопилоты и авторулевые. |
Строительные | автоматизация ручных операций как вспомогательных, так и основных, органически присущих строительному делу. | роботы-демонтажники, роботы-штукатуры |
Бытовые | автоматизация операций, связанных с бытом человека и с богатой разнообразием сферой его обслуживания. | роботы-помощники, роботы-няни, роботы-пылесосы, роботы-носильщики, роботы-игрушки, социальные роботы |
Военные роботы и роботы для обеспечения безопасности | автоматизация военных операций в качестве основной действующей силы и для помощи военнослужащим | это и роботы для переноски тяжестей, роботы-саперы, и активно разрабатываемые сейчас экзоскилеты |
Исследовательские роботы - они служат для поиска, сбора, переработки и передачи информации об исследуемых объектах. К числу таких объектов относятся космическое пространство, поверхности планет, подводное пространство, подземные полости (шахты, пещеры и т. п.), Арктика и Антарктика, пустыни, зараженная местность и другие,
__________________________________________________________________
4 С чегo начинаются роботы – стр.28
труднодоступные для человека области. Примерами таких роботов являются беспилотные летательные аппараты, роботы-саперы, роботы-санитары, различные многоцелевые боевые машины и т. д.5
Классификация роботов может так же производится по характеру выполнения технологических операций:
технологические роботы – выполняют основные технологические операции. Они непосредственно участвуют в техпроцессе в качестве оборудования (гибка, сварка, окраска, сборка и т. д.);
вспомогательные (подъемно-транспортные) выполняют функции переноса объекта в вертикальной и горизонтальной плоскостях. Их применяют для обслуживания основного технологического оборудования;
универсальные роботы – выполняющие разнообразные технологические операции – основные и вспомогательные.
Таким образом, мы видим, что существует множество разновидностей, а так же множество классификаций роботов. При проектировании робота, необходимо четко осознавать для каких целей он будет служить, какие действия будет выполнять. Резюмируя вышеизложенное, отметим, что современная робототехника представляет собой гармоничное сочетание роботов различных типов и поколений, которые возникли в связи с потребностями научно-технического прогресса.
__________________________________________________________________
5 С чегo начинаются роботы - стр.29
Глава 4. Как устроены роботы и кто ими управляет.
Роботы бывают разных размеров от микроскопических – похожих на маленьких мушек, до огромных – размером с многоэтажный дом.
В каждом роботе есть подвижные части – шарниры – похожие на суставы человека, при помощи которых робот может двигаться. Конечности робота, при помощи которых он может брать, поднимать, опускать и перемещать предметы или выполнять какие-нибудь работы, называются манипуляторами. Роботы могут передвигаться по земле, по горам, могут опускаться под воду, летать по воздуху. Например, «Робострайдер» может ходить по воде как водомерка, а «Робопайк» плавает, как рыба.
Роботы исследуют всё, что находится вокруг них при помощи сенсоров – специальных видеокамер, датчиков расстояния и других специальных устройств. Всё, что «видит» робот, и вся информация, которую он получает, поступает в небольшой встроенный внутри робота контроллер – компьютер, который обрабатывает полученную роботом информацию, принимает решения и дает команды всем узлам робота.
Силу и способность двигаться роботу дают электрические моторы или двигающиеся при помощи воздуха или жидкости цилиндры, которые называются приводом.
Некоторыми роботами люди могут управлять, находясь от них очень далеко, при этом команды роботу человек посылает по радиосвязи или по подключенному к роботу кабелю. Например, робот Джейсон-младший может проникать в затонувшие корабли и подводные лодки, обследовать их изнутри, делать фотографии и подбирать обнаруженные внутри затонувших судов предметы.
Некоторые роботы могут выполнять задания сами, без управления человеком. Такие роботы запрограммированы человеком на самостоятельную работу. Про таких роботов говорят, что они обладают искусственным разумом или интеллектом.
Глава 5. Конструирование рабочей модели робота.
Однажды мне пришлось наблюдать как на большом складе происходит разгрузка привезенной продукции. Мое внимание привлекли маленькие погрузчики, управляемые человеком, участвовавшие в перевозке продукции. Мне в голову пришла мысль, что всю эту работу может проделывать робот и мне захотелось собрать такого робота самому. Роботы не знают усталости и могут работать хоть круглые сутки, главное, что бы хватило заряда батареек. А про эффективность роботов не следует и говорить – то, что у людей может занять год работы, робот выполнит за месяц. Я записался в кружок робототехники, где появилась возможность заняться практикой.
Робототехника – это прикладная наука, которая занимается проектированием, созданием и применением роботов и компьютерных систем для их контроля, сенсорной обратной связи и обработки информации.6
Робототехника опирается на такие дисциплины, как электроника, механика, информатика. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
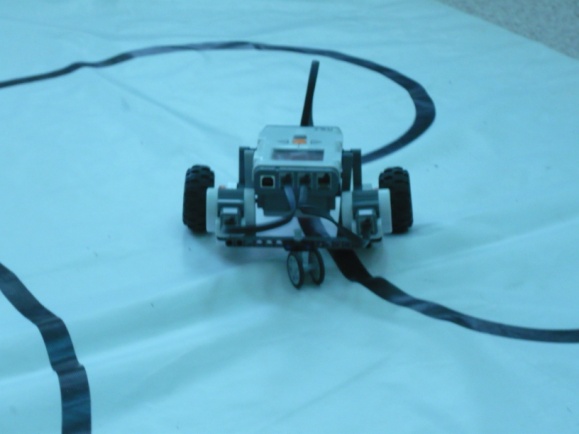
При построении робота я использовал робототехнический комплекс LEGO Mindstorms NXT. (см. прилож. фото 1).
Результатом моего труда должен был стать робот, который движется по черной линии произвольной формы с максимальной скоростью. При проектировании нового робота могли быть использованы колеса или гусеницы. Так как задача заключается в достижении максимальной скорости робота, то я выбрал колеса. При этом передние колеса выполняют функцию ведущих, что положительно влияет на управляемость робота.
__________________________________________________________________
6 Юревич робототехники.- 2-е изд – стр.45
Для движения робота по черной линии я установил датчик интенсивности света. Датчик установлен вертикально вниз на высоте 0,5-1см, что обеспечивает максимальную точность работы. При этом датчик вынесен перед основной конструкцией робота, для более быстрого реагирования робота на поворотах. (см. прил. фото 2). Был собран робот с использованием двух двигателей, установленных на передние колеса. (см. прил. фото 3). Были замерены показатели скорости робота при максимальных мощностях двигателя, которые оказались равными 32,5 см/с. При проектировании модели робота были учтены все факторы, влияющие на скорость робота. При этом робот был построен так, чтобы на повороте потеря скорости была минимальной. Далее были установлены датчики освещенности, которые потребовались для непосредственного выполнения цели работы. В итоге была получена следующая модель робота (см. прил. фото 4). Я считаю, что такой робот может заменить работу человека при разгрузке материалов на больших терминалах. Так как мой робот может продвигаться по намеченной линии, мне кажется, что он может быть использован при сопровождении слабовидящих людей. В дальнейшем мне хотелось бы усовершенствовать эту модель таким образом, что бы робот мог не только перевозить, но и складировать груз на высоких стеллажах.
Глава 6. Интерпретация результатов анкетирования.
Я провел среди своих одноклассников анкетирование на тему «Роботы в твоей жизни». Я составил следующие вопросы для анкеты:
1. ФИО
2. Окружают ли тебя в жизни роботы? (да/нет)
3. Какие роботы встречались в твоей жизни? (перечисли)
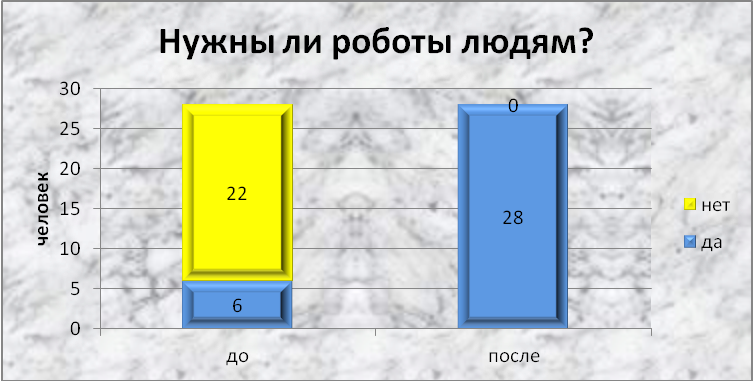
3. Нужны ли роботы людям? (да/нет)
4. Роботов создают для пользы человека или для вреда? (подчеркнуть)
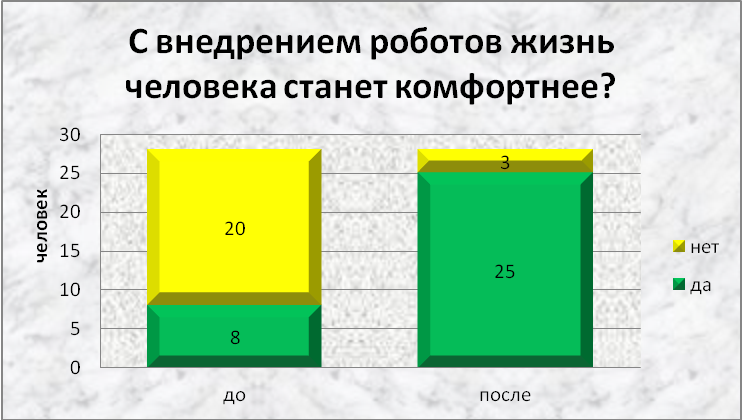
5. С внедрением роботов жизнь человека станет комфортнее? (да/нет)
Анкетирование проводилось до ознакомления с темой и после. Подведя итоги анкетирования, я представил их в виде диаграмм:
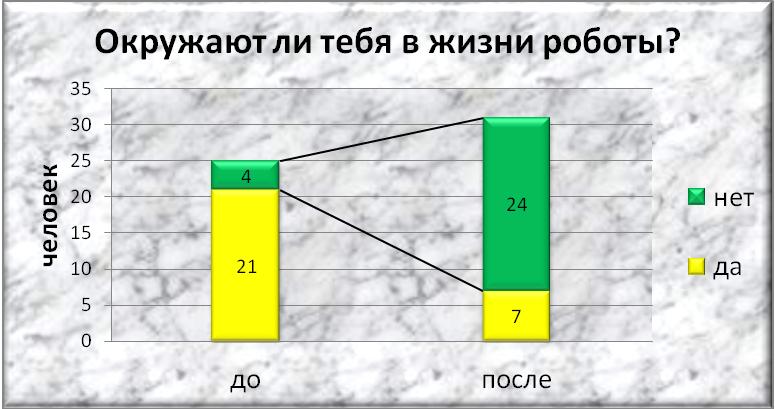

По результатам этого вопроса я выяснил, что многие мои одноклассники имели не точное представление о роботах. Так в своих ответах многие из них отнесли бытовую технику к роботам, которые их окружают. Мне пришлось дать им разъяснение, что телевизор, стиральную машину, посудомоечную машину нельзя считать роботами, потому что они не принимают решений и не реагируют на происходящее вокруг. Вот если бы стиральная машина сначала собрала вещи, постирала, а потом разложила по полочкам – это был бы настоящий робот. Примером может служить робот-пылесос. После ознакомления с темой весь класс согласен, что с появлением роботов жизнь людей измениться в лучшую сторону, станет более комфортной, потому что избавит людей от тяжелой и вредной работы.
Заключение
Техника проникла во все сферы деятельности человека, в своей работе мне пришлось не только работать с конструктором, но и приводить математические подсчеты, работать с диаграммами.
Я ставил перед собой задачи:
- найти информацию о роботах. С помощью энциклопедий и интернета мне удалось выяснить, что такое робот.
- изучить область применения роботов и практически проверить цель своей работы, т. е. сделать своего робота.
В результате работы, анализа литературы я пришел к выводу, что изначально роботы появились для того, чтобы облегчать жизнь человеку.
Робот изобретен с тем, чтобы помогать работникам. Но прежде чем запустить робота в самостоятельное «плавание», конечно, стоит его испытать и всячески проверить.
- провести анкетирование среди одноклассников и выяснить, что им известно о роботах, приходилось ли им сталкиваться в своей жизни с настоящим роботом.
Я провел анкетирование и выявил, что многие мои одноклассники не знали что такое робот, так как они отнесли стиральную машинку-автомат, хлебопечь, кухонный комбайн к роботам.
Подводя итоги исследовательской работы, я могу сказать, что поставленная цель достигнута. Я познакомил своих одноклассников с роботами, заинтересовал их этой темой. Вместе мы убедились, что с появлением роботов в нашей жизни людям станет намного легче и комфортнее. Мне удалось сконструировать робота самому. Во время практики я узнал много новых слов из области робототехники, например датчик, кремний, ПЗС (прибор с зарядовой связью), сервомотор, навигация, акселерометр.
Я считаю, что разработанная мною модель не только важна при погрузо-разгрузочных работах, но и в будущем может помочь медицине, например, способствовать сопровождению слабовидящих людей. В дальнейшем мне хотелось бы усовершенствовать эту модель таким образом, что бы робот мог не только перевозить, но и складировать груз на высоких стеллажах.
Список литературы
1. С чегo начинаются роботы. О проекте Arduino для школьников (и не только) 2011 г.
2. Дж. Вильяме Программируемые роботы. Создаем робота для своей домашней мастерской - М.: НТ Пресс, 2006.
3. пер. с фр. . Сборка и программирование мобильных роботов в домашних условиях - М.; НТ Пресс, 2007.
4 . 123 эксперимента по робототехнике - М.: НТ Пресс, 2007.
5. Юревич робототехники.- 2-е изд., перераб. и доп. - СПб.: БХВ-Петербург, 2005.
6. Сайт Интернет betrayauto. ru›tegs/robototekhnika
7. Сайт Интернет androbots. ru›istoriya…proishozdenie_vidov. php
ПРИЛОЖЕНИЯ
фото1

фото 2
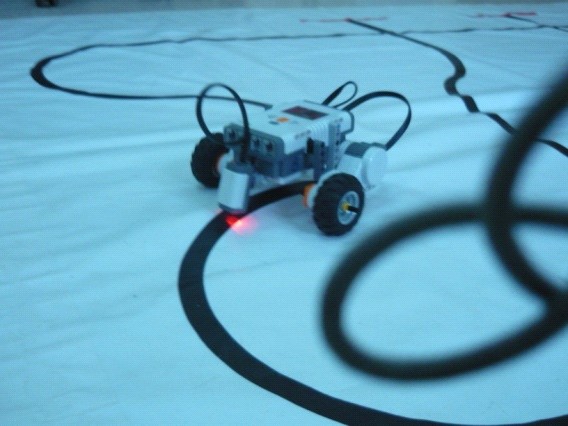
фото 3

фото 4