
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Использование аэрогравиметра GT2A в полярных областях
, , . НТП "Гравиметрические технологии", Москва, Озерная 42 Телефон +7(495)4371401 *****@***ru
, . МГУ им , Москва Ленинские горы 1
Телефон: +7(495)9395933 *****@***ru, *****@***ru
. Институт Физики Земли РАН, Москва, Малая Грузинская 10
Телефон: +7(499)2542332 *****@***com
W. Hewison. Сanadianmicrogravity, 175 Shepperton Rd, Victoria Park, WA, 6100, Australia
Тelephone: +61 (0) 409 887 459 *****@***com
T. Richter, J. Greenbaum, D. Young, D. Blankenship. Institute for Geophysics -- University of Texas at Austin J. J. Pickle Research Campus, Bldg. 196 10100 Burnet Rd. (R2200) Austin TX USA 78758-4445, Phone: 01-512-471- 0385 tom. *****@***edu, 01-512-471-0485 *****@***edu, 01-512-471-0489 *****@***utexas. edu.
В настоящее время в аэрогравиметрических съемках широкое распространение получил аэрогравиметр GT-2A. В данной работе проанализированы причины ухудшения точности гравиметра GT-2A в полярных областях. Продемонстрирован путь создания всеширотной модификации гравиметра GT-2AР с использованием четырехантенной GPS. Приведены результаты полетов в арктических и антарктических областях.
Гравиметр GT-2A включает в свой состав не возмущаемую маневрированием самолета гиростабилизированную платформу, помещенную в трехосный карданов подвес с внешней азимутальной осью. На платформе расположены гравиметрический чувствительный элемент с вертикальной осью чувствительности, два горизонтальных акселерометра, динамически настраиваемый гироскоп (ДНГ) с вертикальным направлением кинетического момента и оптоволоконный датчик вертикальной угловой скорости средней точности. По осям карданова подвеса установлены моментные двигатели и датчики угла. Исходя из сигналов, подаваемых на датчики момента гироскопа, система коррекции гироплатформы вырабатывает ее гироскопический курс.
Ценой, которой приходится платить за обеспечение невозмущаемости гироплатформы, является необходимость использования в реальном времени внешней информации о скорости самолета в проекции на ее оси.
В гравиметре GT-2A используется внешняя информация о скорости самолета в географической системе координат, доставляемые приемником одноантенной GPS. Полученные значения скорости, проектируются на оси платформы с использованием значения компасного курса гироплатформы, вычисляемого в матобеспечении гравиметра по сигналам, подаваемым на датчики моментов ДНГ.
Нетрудно показать, что погрешность компасного курса ДК определяется соотношением
ДК = (dpE+бE) /(U+л) cos ц, (1)
где
dpE-восточный дрейф ДНГ,
бE – скорость изменения восточной составляющей погрешности гировертикали,
U – угловая скорость вращения Земли,
л скорость изменения долготы.
Из соотнршения (1) следует, что:
1) при увеличении широты места погрешность выработки гироскопического курса возрастает, она асимптотически стремится к бесконечности при приближении самолета к географическому полюсу, так как знаменатель соотношения 1 на полюсе становится равным нулю;
2) при движении западными курсами, когда скорость изменения долготы отрицательна, погрешность выработки курса при прочих равных условиях больше, чем при движении восточными, когда скорость изменения долготы положительна. Этот эффект особенно ощутим на высоких широтах, когда скорость изменения долготы соизмерима с о угловой скоростью вращения Земли. И при движении западными курсами при самолетных скоростях знаменатель соотношения (1) может обращаться в ноль даже на широтах ниже 800.
С учетом погрешности курса очевидно в погрешности внешней информации ДVви о скорости самолета V в проекции на оси платформенной системы координат появляются члены типа ДVви=VˑДK.
Поэтому с увеличением погрешности компасного курса при увеличением широты места, увеличивается погрешность необходимой нам внешней информации о скорости, что приводит к возмущению горизонта и, как следует из рассмотрения числи, к еще большему увеличению погрешности курса. Все вышесказанное приводит к невозможности использования гравиметра GT-2A на широтах превышающих 750.
Можно утверждать, что, хотя одноантенный GPS является почти идеальным источником внешней информации о скорости, но, к сожалению, скорость вычисляется GPS в географической, а не в необходимой для демпфирования платформенной системе координат.
Основная идея использования четырехантенного GPS типа Javad Qattro G3D является то, что он кроме составляющих скорости самолета в проекциях на оси гринвичской системы координат (как и в любом одноантенном GPS), вырабатывает и выдает потребителю матрицу направляющих косинусов между гринвичской и связанной со строительными осями самолета системами координат. Матрица направляющих косинусов между самолетной связанной системой координат и системой координат гироплатформы является функцией показаний датчиков углов, расположенных на осях карданного подвеса гравиметра. Поэтому в гравиметре GT-2AР появляется возможность вычисления в реальном времени необходимой внешней информации о скорости в проекциях на оси гироплатформы. Тем самым, очевидно, появляется возможность вычислять составляющие скорости в платформенной системе координат в любой точке Земного шара, включая географические полюса.
В 2011 – 2012 годах на самолете DC-3 Техасский университет совершал полеты с гравиметром GT-2AP в Антарктиде, в 2012-2013 годах Институт физики Земли РАН на самолете АН-26 в Арктике.
На рис.1 и рис. 2 приведены фотографии самолета DC-3 на фоне антарктического вулкана Эребус и гравиметра GT-2AP на его борту. На рис.3 расположение антенн на самолете DC-3. Расстояние между продольными антеннами 11 м, поперечными, расположенными на крыльях – 22 м.


Рис.1 Рис.2
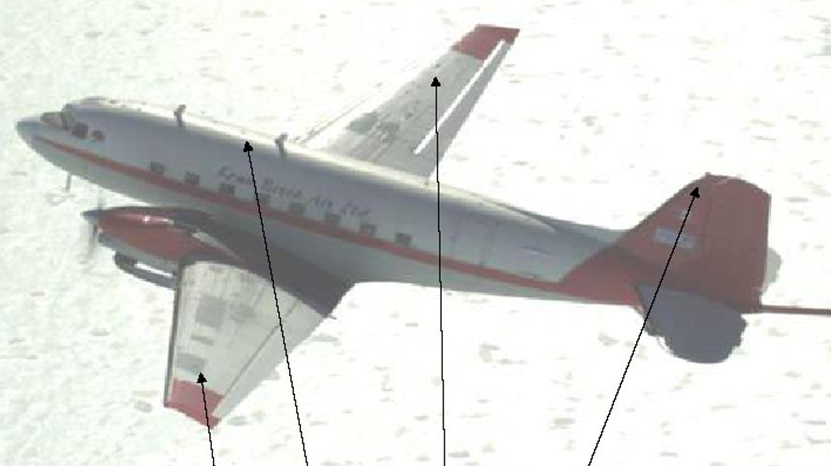
Рис.3
На рис. 4 и рис. 5 приведены фотографии самолета АН-26 и гравиметра GT-2AP на его борту. На борту самолета кроме гравиметра GT-2AP работали еще два гравиметра GT-2A.


Рис. 4 Рис. 5
Все четыре антенны в самолете были установлены внутри фюзеляжа самолета – задняя в блистере (Рис.6), три остальные в кабине пилотов. Расстояние между продольными антеннами 3 м, между поперечными – 1.5 м.

Рис.6
На Рис.7 представлена схема одного из полетов в Антарктиде. Самолет базировался на широте минус 800, измерительные полеты совершались на широтах минус 77-780. Полет продолжался 7 часов и проходил со скоростью примерно 200 уз.
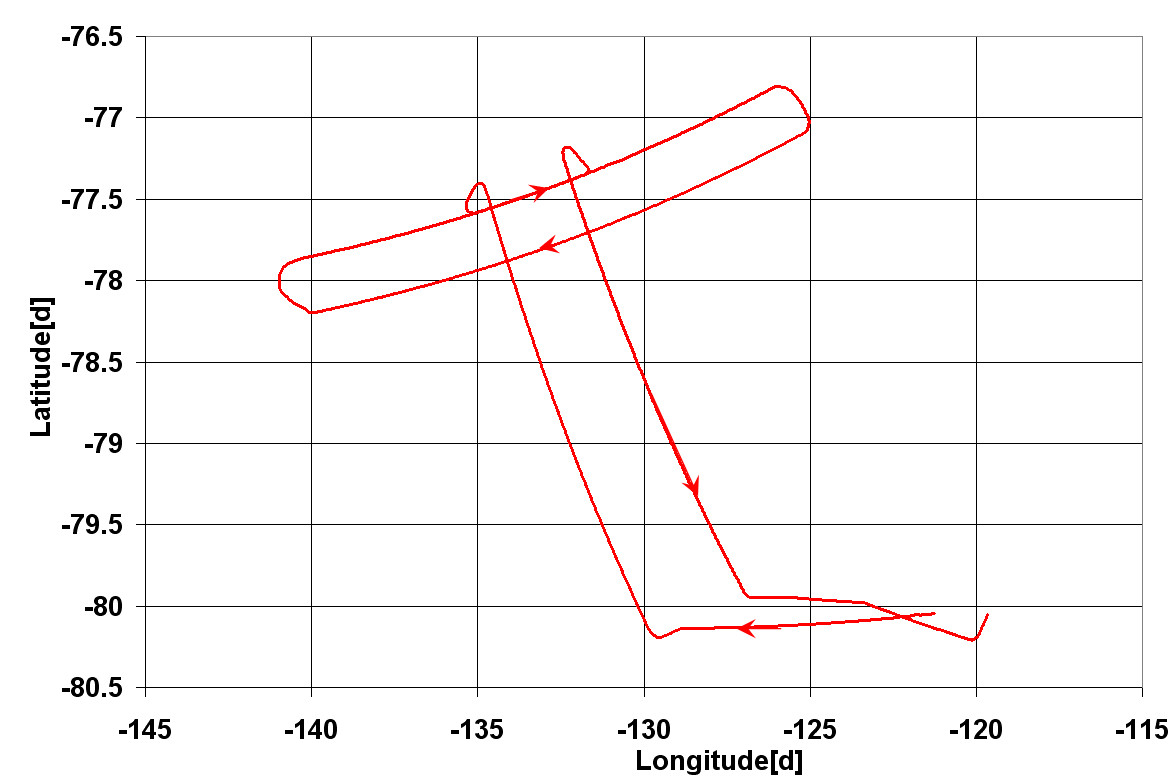
Рис. 8
На Рис.9 представлены некоторые результаты данного полета. На нижнем графике представлены кривые восточной и северной составляющих скорости самолета. На верхнем – оценки погрешности гироплатформы вокруг ее осей, полученные в процессе постобработки. Данные оценки используются в постобработке результатов измерений при выработки аномалии силы тяжести.
Из анализа нижнего графика следует, что восточная что западная составляющая скорости самолета достигала 150 узлов, что на широте 800 примерно равно линейной переносной скорости Земли, т. е. видимая угловая скорость вращения Земли становится равной нулю. В этом случае получить курс самолета компасным методом невозможно, поскольку знаменатель соотношения (1) обращается в ноль. Отсюда следует невозможность использования штатного гравиметра GT-2A на этих широтах. Гравиметр же GT-2AР сохранял работоспособность (погрешность гироплатформы в пределах 1-2 угл. мин. является вполне допустимой).
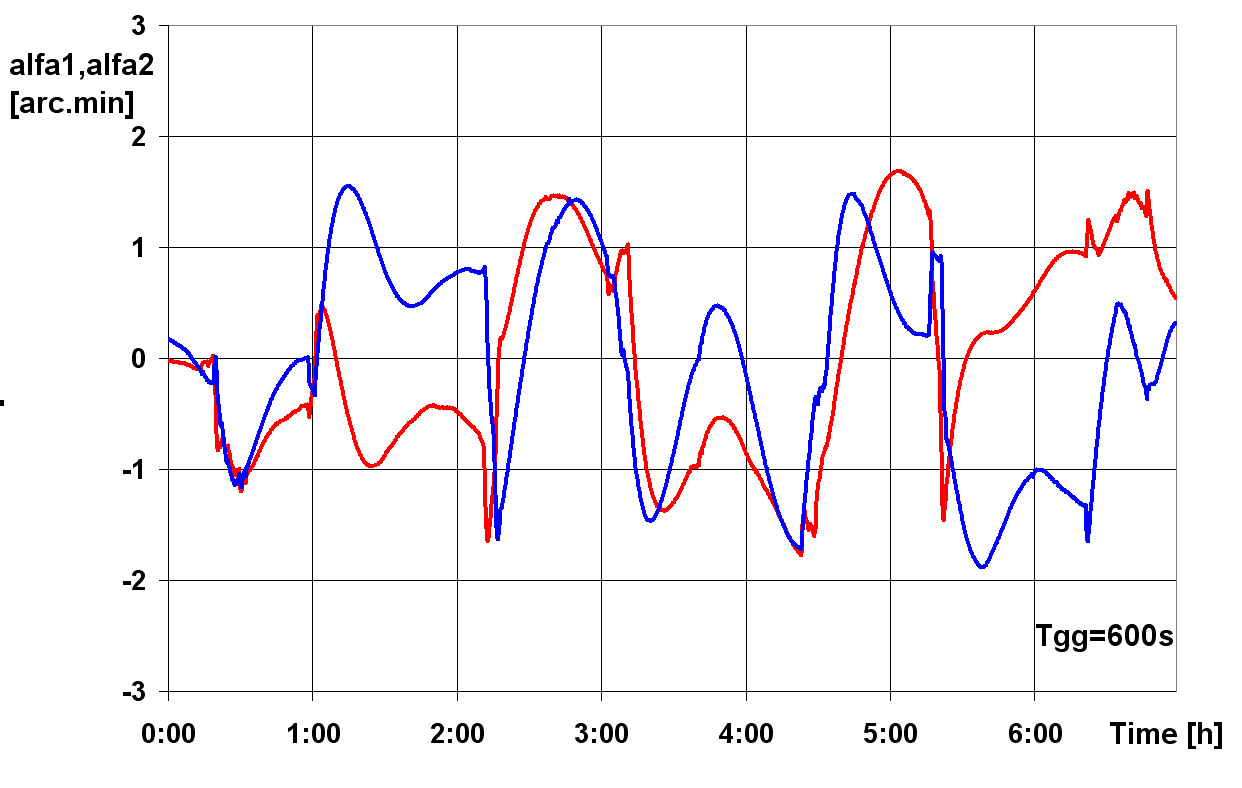
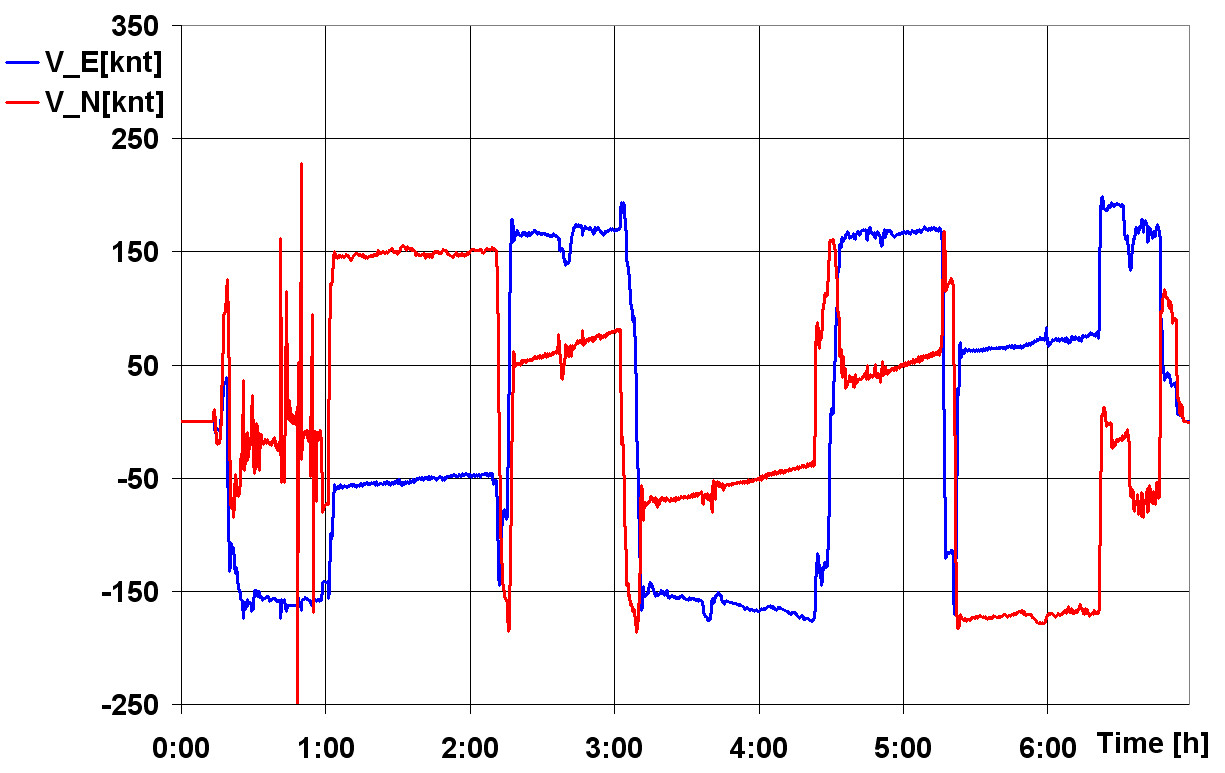
Рис. 9
На рис.10 представлена схема одного из полетов в Арктике. Самолет АН-24 вылетел с аэродрома Андерма на широте 700 , поднялся до широты 780, развернулся, долетел до исходной точки и, не производя посадку, практически западным курсом долетел и совершил посадку на аэродроме Архангельска на широте 650. Полет продолжался 7 часов и проходил со скоростью примерно 200 уз.
На Рис.11 представлены некоторые результаты данного полета.
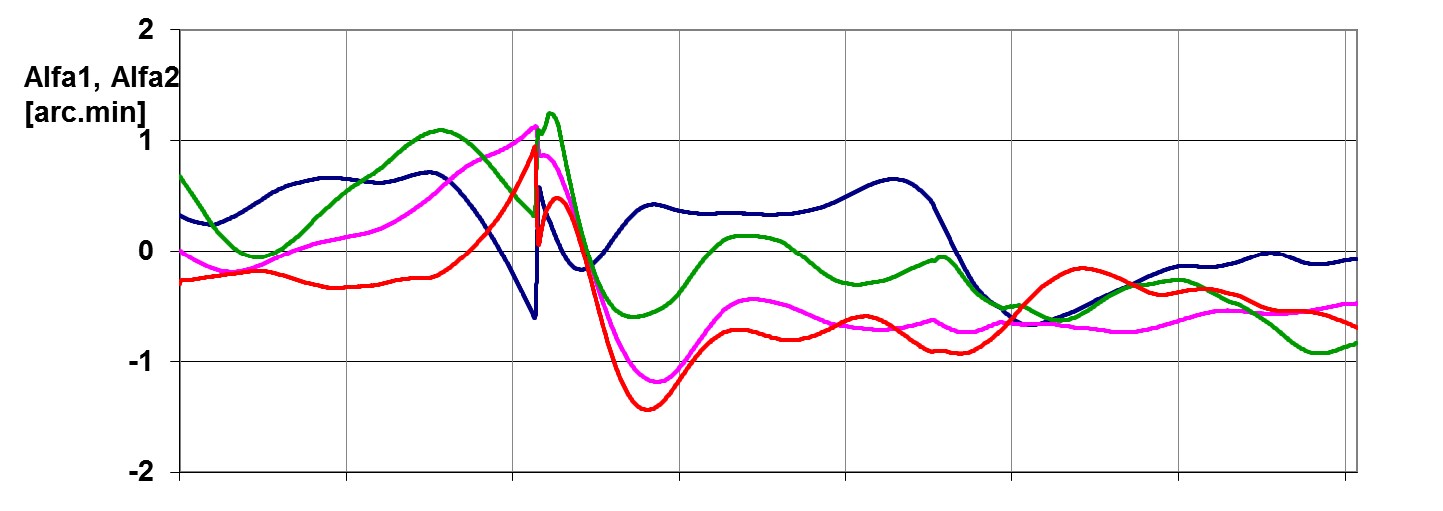
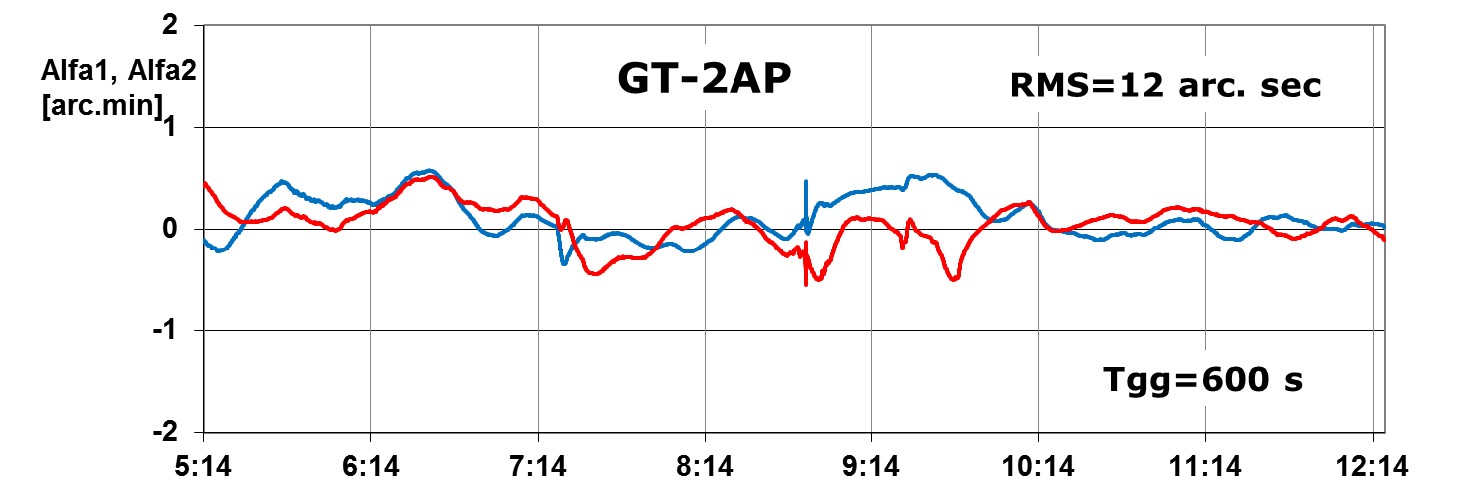
На верхнем графике представлены погрешности стабилизации гироплатформ двух гравиметров GT-2A (работающих на том же борту) вокруг их осей. На нижнем – погрешности стабилизации гироплатформы гравиметра GT-2AP вокруг ее осей.
Из данных графиков следует, что при работе в одинаковых условиях погрешности гировертикали гравиметра GT-2AP примерно в 3 раза меньшепогрешности гировертикали гравиметра GT-2A
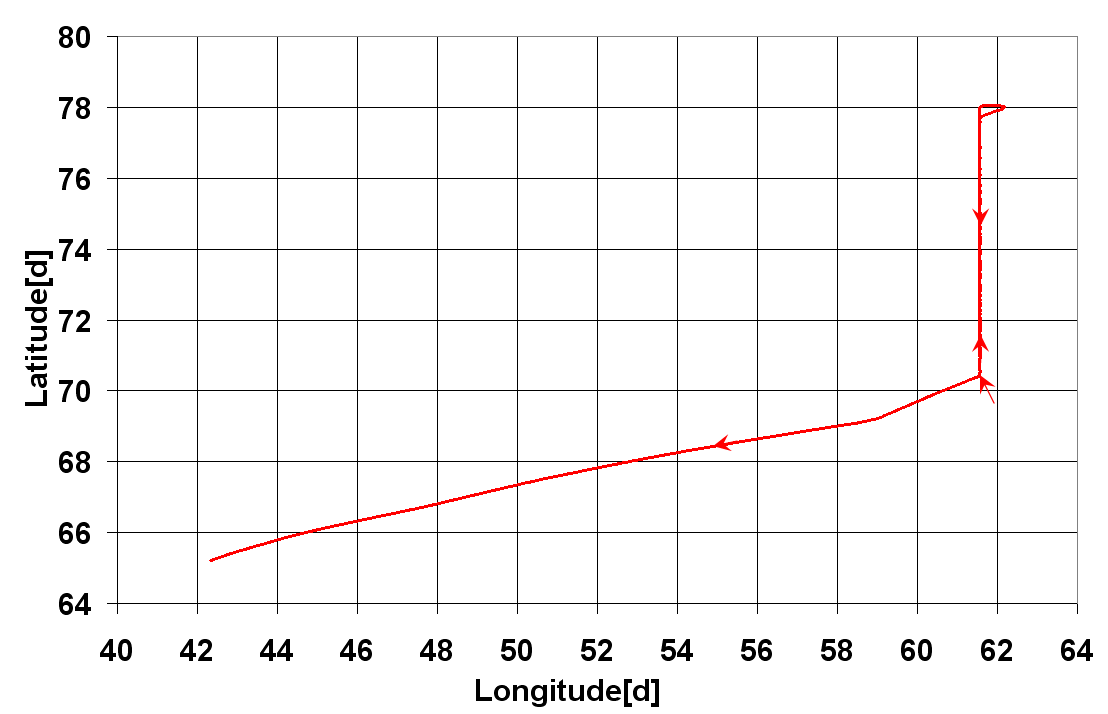
Рис.10
В заключении следует сказать, что в данной работе рассмотрен вариант построения модификации гравиметра GT-2A – GT -2AP, использующего данные четырехантенной GPS. Показано, что в отличие от гравиметра GT-2A погрешность стабилизации гироплатформы гравиметра GT-2AP не зависит от широты места, включая точки географических полюсов.
Эффективность модифицированного варианта гравиметра подтверждена в процессе полетов в Арктике и Антарктиде.
