

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
СОДЕРЖАНИЕ
1 Исследование автоматического регулятора скорости движущегося объекта при внешних воздействиях, носящих постоянный характер 3
1.1 Условие задания 1 3
1.2 Исходные данные задания 1 4
1.3 Решение задания 1 5
2 Исследование автоматического регулятора скорости движущегося объекта при внешних воздействиях, носящих переменный характер 14
2.1 Условие задания 2 14
2.2 Исходные данные задания 2 14
2.3 Решение задания 2 14
Список использованных источников 22
1 Исследование автоматического регулятора скорости движущегося объекта при внешних воздействиях, носящих постоянный характер
1.1 Условие задания 1
В процессе выполнения задания 1необходимо:
– построить структурную схему модели автоматического регулятора скорости движущегося объекта с использованием типовых звеньев САУ;
– вычислить параметры используемых типовых звеньев;
– осуществить исследование функционирования автоматического регулятора скорости при воздействии заданных возмущающих факторов, используя для моделирования программный продукт МВТУ (ехнических Устройствах) или пакет программ «Simulink» математической среды «Matlab system».
Для выполнения задания 1 необходимо использовать следующие исходные данные:
1) Vн – значение скорости движения объекта на момент начала регулирования, км/ч;
2) Vз – значение заданной скорости движения объекта, км/ч;
3) K1 – статический коэффициент усиления апериодического звена в основной цепи регулятора, характеризующий взаимосвязь между текущим значением отклонения ∆V фактической скорости Vф от заданной Vз и величиной изменения ∆Vр регулируемой скорости в установившемся режиме;
4) T1 – постоянная времени апериодического звена в основной цепи регулятора, характеризующая инерционность реализации управляющего воздействия, с;
5) T2 – постоянная времени апериодического звена в цепи обратной связи, характеризующая инерционность цепи обратной связи устройства автоматического регулирования, с;
6) A – максимальное приращение ∆Vв фактической скорости Vф от периодически изменяющегося внешнего возмущающего воздействия, км/ч.
Закон изменения фактической скорости Vф(t) движения объекта имеет вид следующей функции:
Vф(t) = Vн + ∆Vв(t) + ∆Vр(t),
где ∆Vв(t) – изменение фактической скорости, вызванное периодически изменяющимся внешним возмущающим воздействием с амплитудой A, км/ч;
∆Vр(t) – изменение фактической скорости, вызванное регулирующим воздействием апериодического звена в основной цепи регулятора, км/ч.
Используя структурные схемы модели автоматического регулятора скорости с использованием программных средств Simulink или МВТУ, студент должен:
– вычислить статический коэффициент усиления К2 цепи обратной связи;
– найти аналитическое выражение для передаточной функции W(p) замкнутой системы автоматического регулирования скорости (далее системы);
– используя программные средства Simulink или МВТУ, получить графики переходной функции замкнутой системы h(t) и сделать выводы об устойчивости системы;
– используя программные средства Simulink или МВТУ, получить графики логарифмической амплитудно-частотной L(щ) и фазочастной ц(щ) характеристик замкнутой системы, и подтвердить сделанные ранее выводы об устойчивости замкнутой системы;
– произвести оценку основных показателей качества регулирования скорости при изменении постоянной времени Т2 апериодического звена в цепи обратной связи автоматического регулятора скорости в следующих пределах: T2min = 0,1⋅T2; T2max = 5⋅T2;
– вывести на печать графики h(t), Hp(щ) и цp(щ);
– привести краткое пояснение хода выполнения работы и сформулировать выводы по результатам исследований.
1.2 Исходные данные задания 1
По последней цифре шифра 8 определяем:
![]()
По предпоследней цифре шифра 4 определяем:
![]()
1.3 Решение задания 1
Функциональная схема автоматического регулятора скорости приведена на рис.1.1.

В качестве объекта регулирования ОР подразумевается колесное транспортное средство, линейное поступательное движение которого осуществляется за счет вращательного движения колесных пар. Следовательно, чувствительным элементом ЧЭ изменения скорости движения объекта может служить колесо, а в качестве измерительного устройства ИУ может служить, например, преобразователь скорости вращения колеса в напряжение постоянного тока.
В качестве усилительно-преобразовательного устройства УП может служить электросиловая установка, установленная на транспортном средстве и воздействующая на тяговый двигатель, являющийся исполнительным устройством ИСУ, выполняющим функции ускорения или замедления (при электрическом реостатном торможении) вращения колеса. Тяговый двигатель в режиме тяги реализует требуемое значение силы Fт или в режиме генератора – требуемое значение силы Wт, обеспечивая соответствующее изменение скорости вращения колеса в единицу времени.
Задающее устройство ЗУ формирует сигнал постоянного напряжения, пропорциональный заданной линейной скорости, поступающий на один из входов устройства сравнения УС. На другой вход УС поступает напряжение, пропорциональное фактической скорости движения. С выхода УС сигнал ошибки в виде напряжения, пропорционального разности скоростей, поступает на собственно регулятор.
Источник внешнего возмущения ВВ формирует возмущающее воздействие, обусловленное, например, изменением сопротивления движению транспортного средства на участках пути с различным профилем, вызывающее изменение фактической скорости.
Представим функциональные блоки в виде моделей с использованием типовых динамических звеньев:
1) ЗУ и ВВ – блоки ступенчатых функций с амплитудами, численно равными Uз = Vз и ДVв = A соответственно;
2) прямой канал регулирования (УП и ИСУ) – блок апериодического звена первого порядка с коэффициентом передачи K1 и постоянной времени T1;
3) канал обратной связи (ЧЭ и ИУ) – блок апериодического звена первого порядка с коэффициентом передачи K2 и постоянной времени T2;
4) ОР – блок ступенчатой функции с амплитудой выходного сигнала, численно равной Vн, и два сумматора;
5) УС – блок формирования разностного сигнала (блок вычитания).
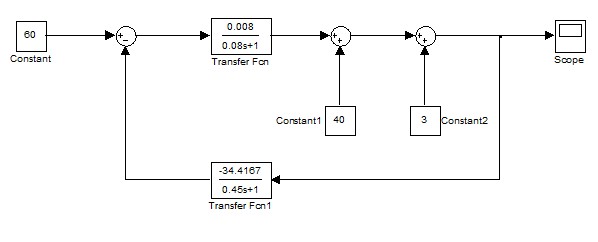
Структурная схема автоматического регулятора скорости приведена на рис.1.2.

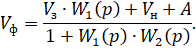
Составим для структурной модели замкнутой САР аналитическое выражение для ее передаточной функции W(p), для чего составим уравнение для фактической скорости на выходе системы:
![]()
Так как ![]()
![]() , то уравнение после подстановки примет вид:
, то уравнение после подстановки примет вид:
![]()
Полученное выражение преобразуем к виду:
![]()
откуда
Передаточная функция W(p) есть отношение выходной величины Vф к входной Vз:
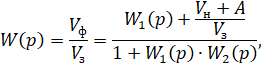
или после подстановки

После преобразования выражение (1.1) примет вид:

Запишем уравнение для установившегося режима работы системы:
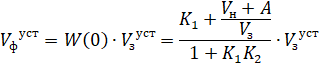
или с учетом того, что ![]()
![]() :
:

Из уравнения (1.3) выражаем K2:

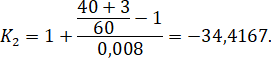
После подстановки в (1.4) числовых значений находим:
Модель автоматического регулятора скорости, построенная в программе Simulink, приведена на рис.1.3.

Запускаем процесс моделирования, на экране блока Scope наблюдаем график изменения выходной величины системы рис.1.4.
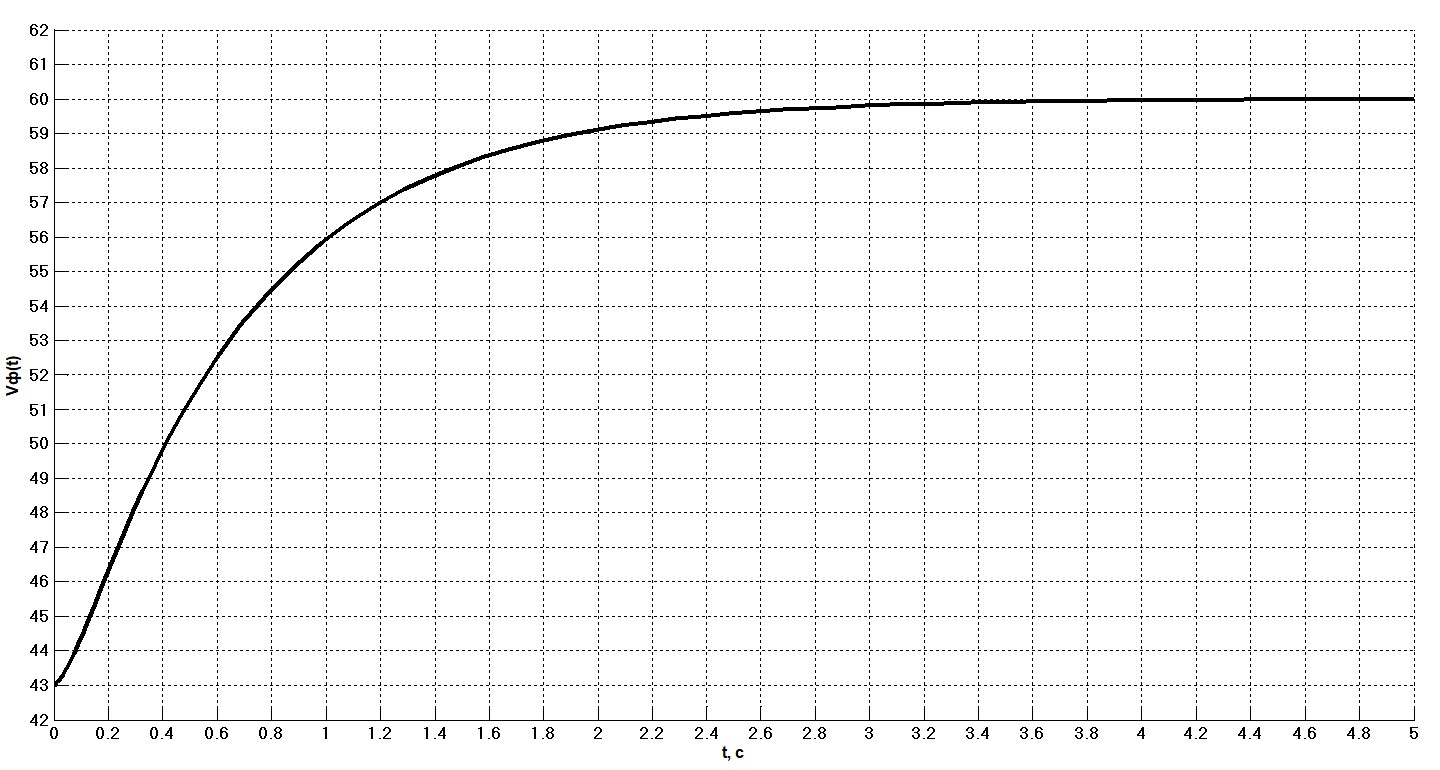

Система устойчива, так как переходной процесс имеет затухающий характер. Установившееся значение выходной величины равно 60 км/ч и достигает значения 57 км/ч за время, равное tр = 1,2 с, что характеризует длительность переходного процесса.
Максимальное абсолютное отклонение регулируемой скорости
![]()
перерегулирование
Для построения переходной функции h(t), логарифмических частотных характеристик L(щ) и ц(щ), годографа АФЧХ в программе Matlab используем в командном режиме tf–модели [2, с.30], команды step [2, с.35], bode и nyquist [2, с.39].
>> K1 = 0.008 %вводим исходные данные
K1 =
0.0080
>> T1 = 0.08
T1 =
0.0800
>> T2 = 0.45
T2 =
0.4500
>> Vz = 60
Vz =
60
>> Vn = 40
Vn =
40
>> A = 3
A =
3
>> K2 = 1 + ((Vn + A)/Vz - 1)/K1 %вычисляем значение К2
K2 =
-34.4167
>> sys1 = tf([K1],[T1 1]) %tf-модель прямого канала регулирования
Transfer function:
0.008
----------
0.08 s + 1
>> sys2 = tf([K2],[T2 1]) %tf-модель цепи обратной связи
Transfer function:
-34.42
----------
0.45 s + 1
>> sys = (sys1 + (Vn + A)/Vz)/(1 + sys1*sys2) %tf-модель замкнутой системы
Transfer function:
0.002064 s^3 + 0.05647 s^2 + 0.4414 s + 0.7247
----------------------------------------------
0.00288 s^3 + 0.0784 s^2 + 0.588 s + 0.7247
>> T = 0:.1:5; %формируем массив отсчетов по времени
>> step(sys, T) %получаем график переходной функции
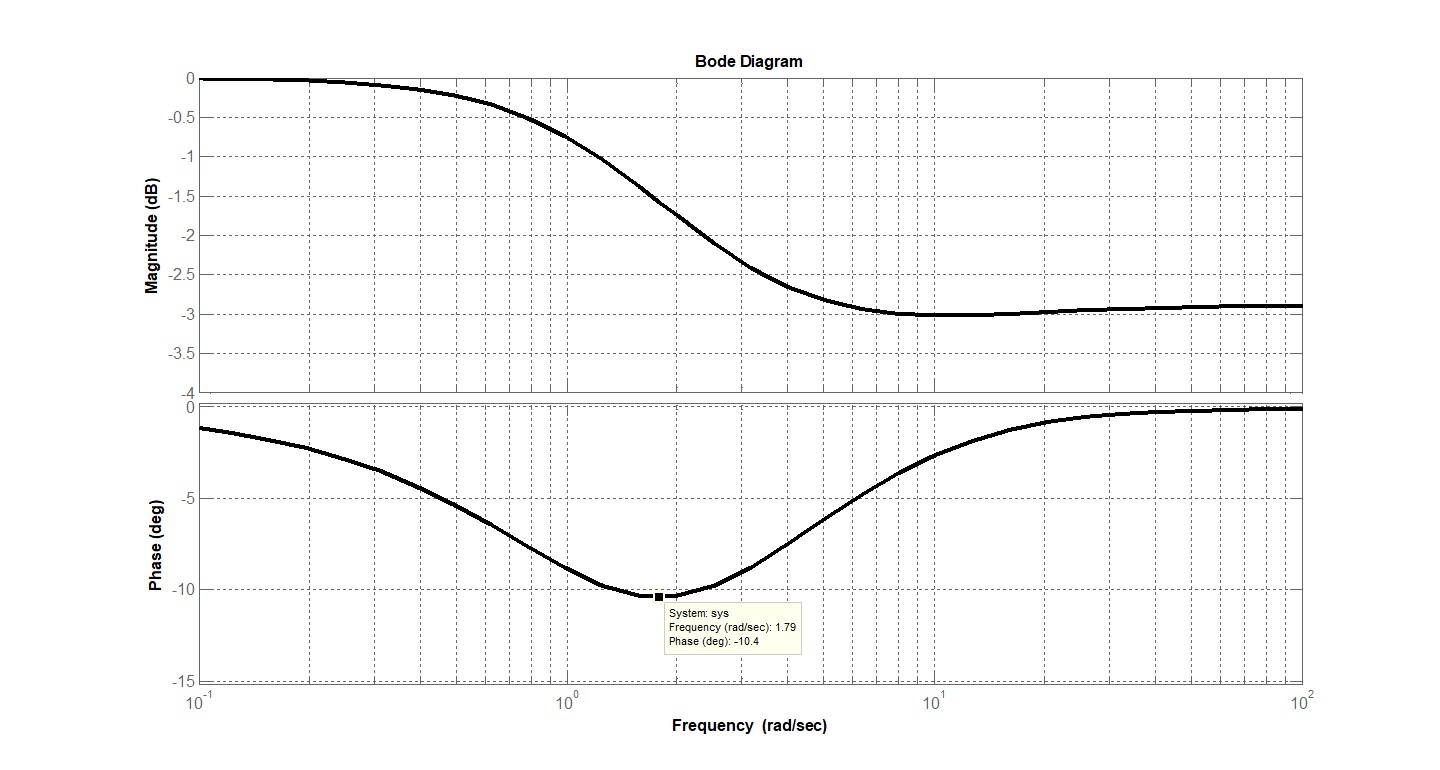
>> bode(sys) %получаем графики ЛЧХ замкнутой системы
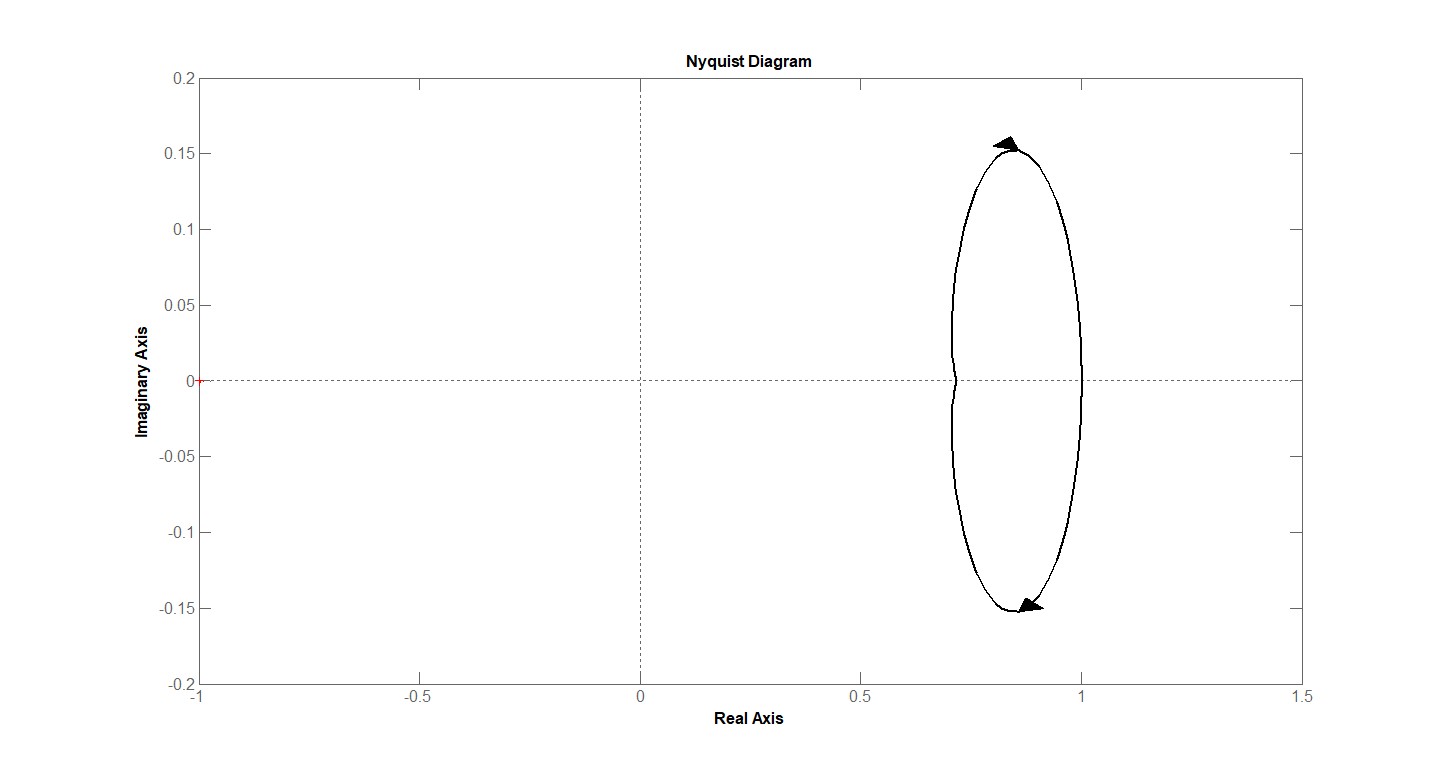
>> nyquist(sys) %получаем годограф АФЧХ замкнутой системы
Характеристики замкнутой системы при значении постоянной времени цепи обратной связи T2 = 0,45 с, приведены на рис.1.5–1.7.
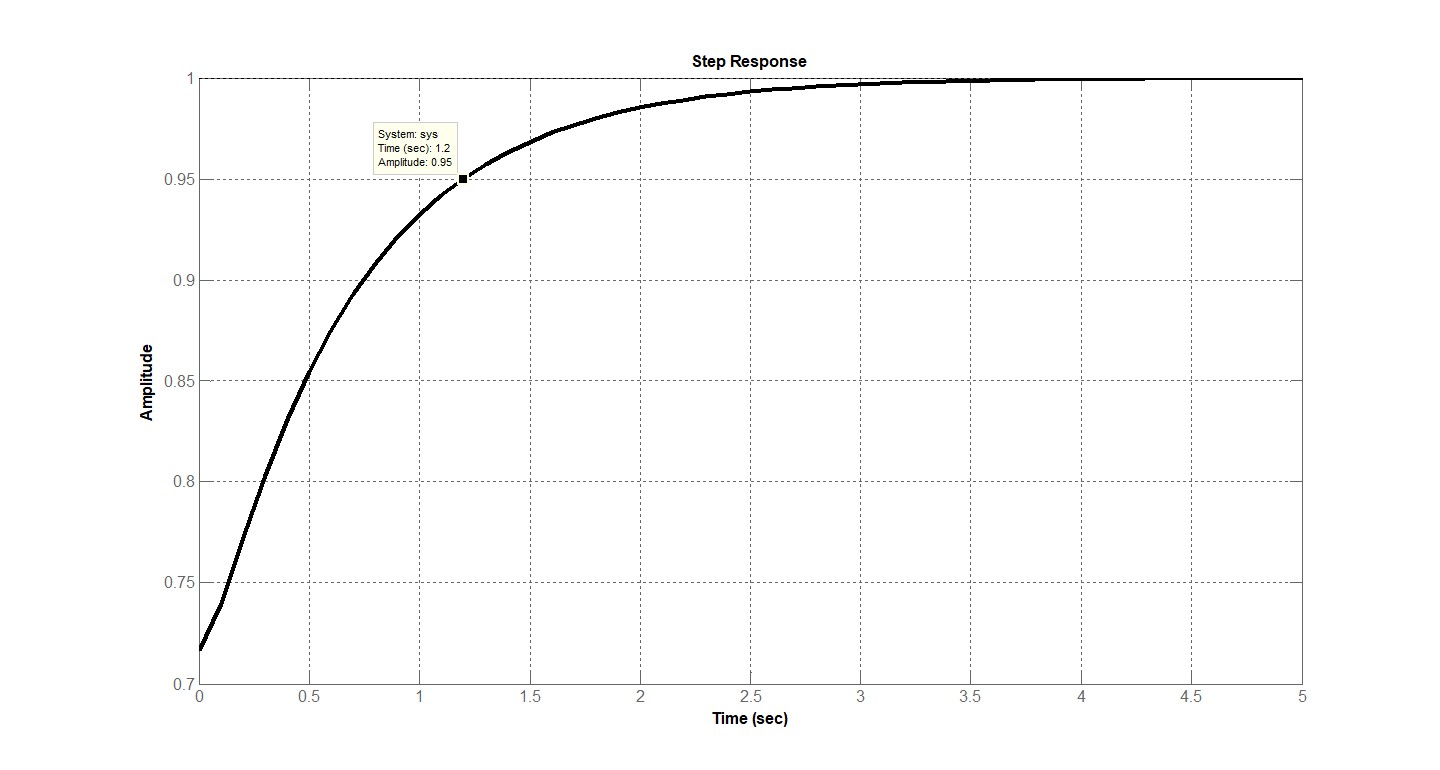



По рис.1.5 определяем время переходного процесса tр = 1,2 с, максимальное абсолютное отклонение регулируемой скорости
![]()
перерегулирование
Из рис.1.6 видно, что в системе наблюдаются отрицательные фазовые сдвиги, максимальный по модулю фазовый сдвиг, равный –10,40, достигается на частоте 1,79 рад/с.
Годограф АФЧХ на рис.1.7 построен для полного диапазона изменения частоты от –∞ до +∞. Т. к. в системе присутствуют лишь отрицательные фазовые сдвиги, ей соответствует нижняя ветвь годографа (ветвь изменения частоты от 0 до +∞).
Произведем оценку основных показателей качества регулирования скорости при изменении постоянной времени Т2 апериодического звена в цепи обратной связи автоматического регулятора скорости в следующих пределах: T2min = 0,1⋅T2; T2max = 5⋅T2.
Для этого в программе Matlab в командном режиме будем задавать новые значения T2, строить новые модели цепи обратной связи sys2 и замкнутой системы sys, получать переходные характеристики системы.
>> T2 = 0.045 %вводим значение 0,1*Т2
T2 =
0.0450
>> sys2 = tf([K2],[T2 1]) %строим tf-модель цепи обратной связи
Transfer function:
-34.42
-----------
0.045 s + 1
>> sys = (sys1 + (Vn + A)/Vz)/(1 + sys1*sys2) %строим tf-модель замкнутой системы
Transfer function:
0.0002064 s^3 + 0.009775 s^2 + 0.1479 s + 0.7247
------------------------------------------------
0.000288 s^3 + 0.0136 s^2 + 0.183 s + 0.7247
>> T = 0:.01:5; %формируем массив отсчетов по времени
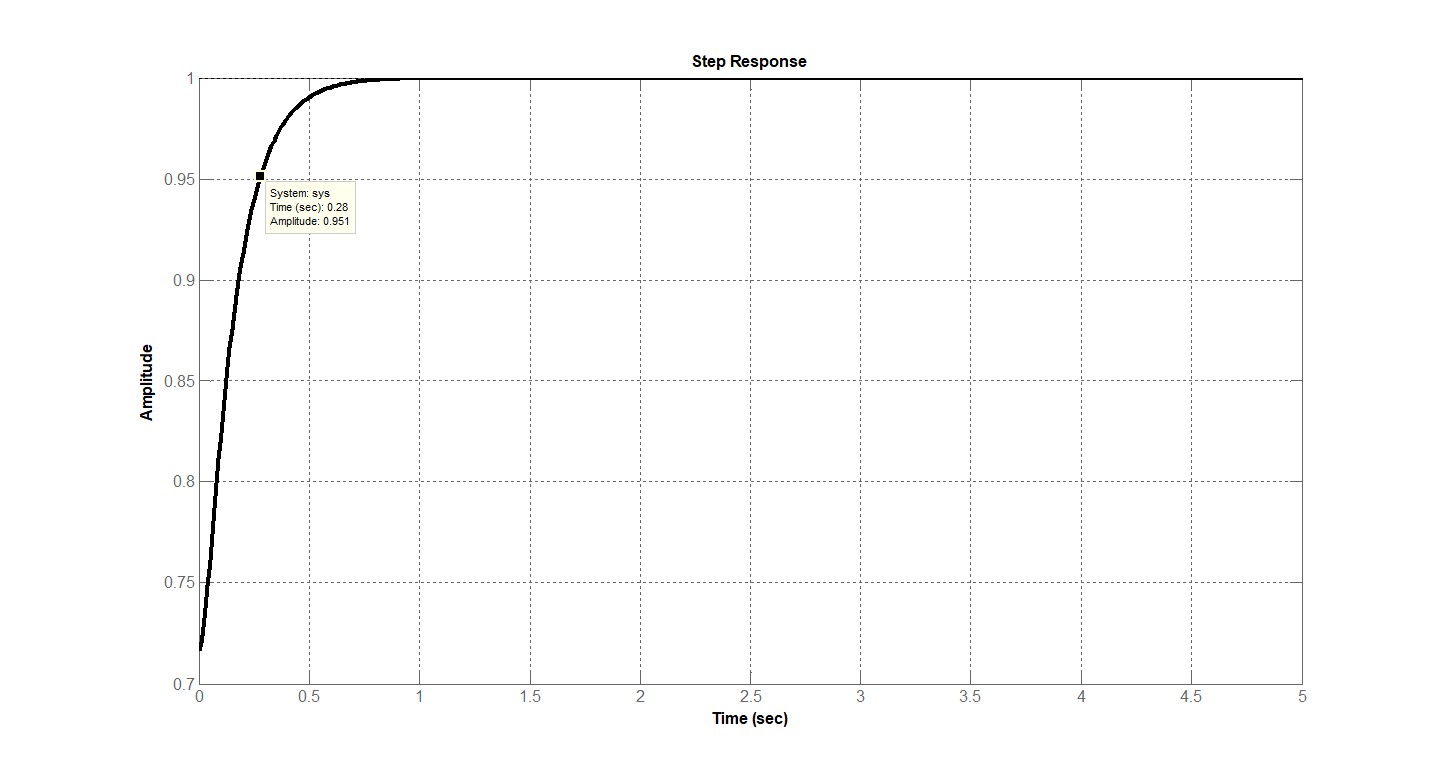
>> step(sys, T) %получаем переходную характеристику
>> T2 = 2.25 %вводим значение 5*Т2
T2 =
2.2500
>> sys2 = tf([K2],[T2 1]) %строим tf-модель цепи обратной связи
Transfer function:
-34.42
----------
2.25 s + 1
>> sys = (sys1 + (Vn + A)/Vz)/(1 + sys1*sys2) %строим tf-модель замкнутой системы
Transfer function:
0.01032 s^3 + 0.264 s^2 + 1.746 s + 0.7247
------------------------------------------
0.0144 s^3 + 0.3664 s^2 + 2.388 s + 0.7247
>> T = 0:.01:10; %формируем массив отсчетов по времени
>> step(sys, T) %получаем переходную характеристику
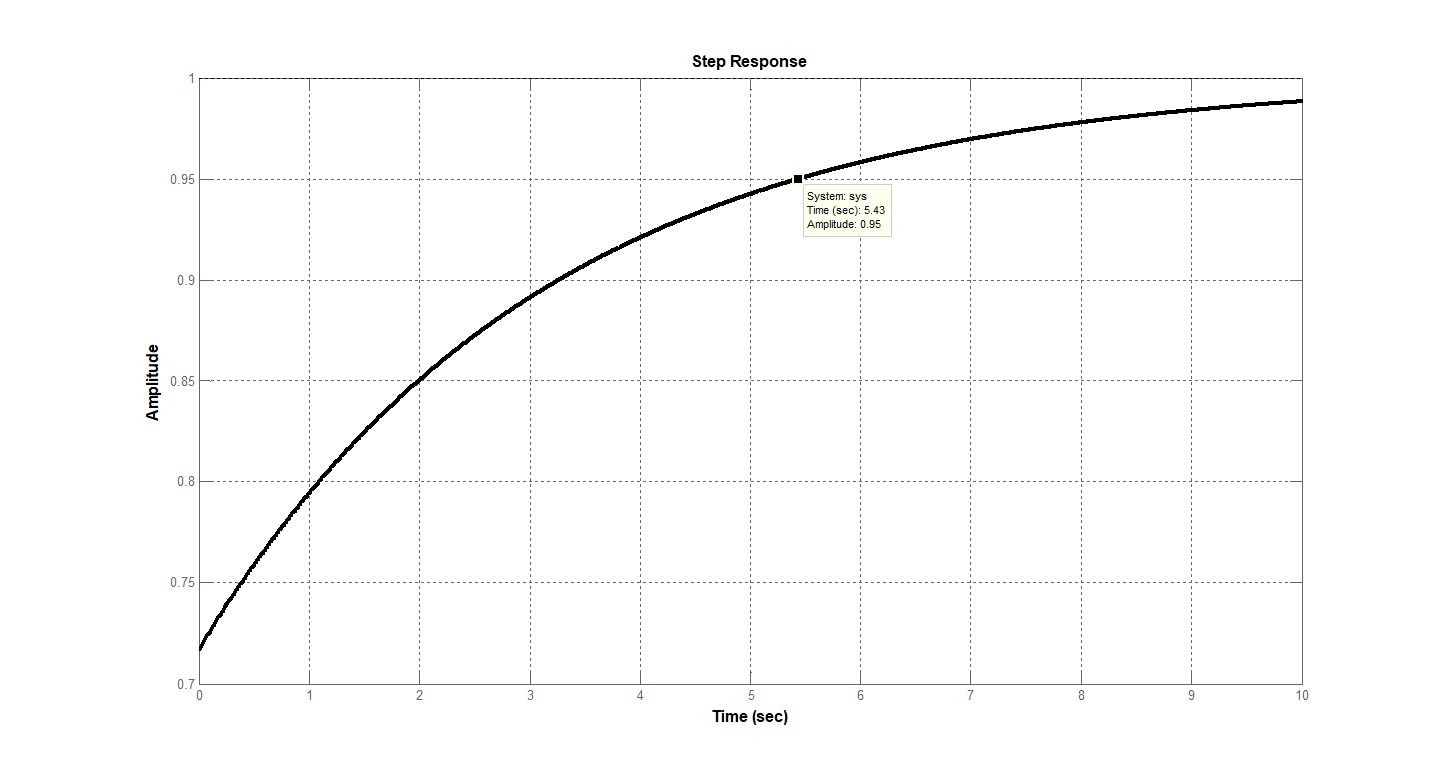
Переходные характеристики системы при значениях постоянной времени 0,1·T2 и 5·T2 приведены на рис.1.8–1.9. Из графиков видно, что при 0,1·T2 = 0,045 с время переходного процесса стало равным 0,28 с. При 5·T2 = 2,25 с оно составляет 5,43 с. Таким образом, делаем вывод, что между значением постоянной времени T2 и временем переходного процесса существует прямая зависимость: при увеличении T2 увеличивается и время переходного процесса. На величину абсолютного отклонения и перерегулирования в системе значение T2 не влияет.


2 Исследование автоматического регулятора скорости движущегося объекта при внешних воздействиях, носящих переменный характер
2.1 Условие задания 2
В процессе выполнения задания 2 необходимо:
– откорректировать структурную схему модели автоматического регулятора скорости движущегося объекта с учетом переменного характера внешнего возмущающего воздействия;
– задать параметры используемых типовых звеньев;
– осуществить исследование функционирования автоматического регулятора скорости при воздействии заданных возмущающих факторов.
Для выполнения задания 2 необходимо дополнительно использовать следующие исходные данные:
1) A – амплитуда периодически изменяющегося по синусоидальному закону внешнего возмущающего воздействия

2) Tв – период изменения внешнего возмущающего воздействия, с.
2.2 Исходные данные задания 2
По предпоследней цифре шифра 4 определяем:
![]()
2.3 Решение задания 2
Для того чтобы система автоматического управления выполняла качественно свои функции в условиях переменного внешнего возмущающего воздействия, она должна обладать свойствами САУ с комбинированным управлением, как по отклонению, так и по возмущению.
Для построения модели САУ с комбинированным управлением статический коэффициент усиления цепи обратной связи должен автоматически изменяться (подстраиваться под изменяющиеся условия функционирования САУ) в соответствии с выражением:
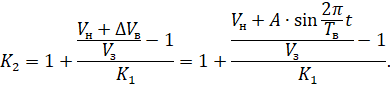
Следовательно, модель САУ должна содержать расчетный узел по автоматическому вычислению текущего значения коэффициента К2. Соответственно, модель цепи обратной связи в структурной схеме модели САУ (см. рис.1.2) должна видоизмениться, а именно:
иметь расчетный узел по вычислению коэффициента К2;
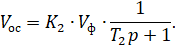
иметь формирователь выходного сигнала Voc цепи обратной связи, состоящий из множителя, реализующего следующую функцию перемножения:
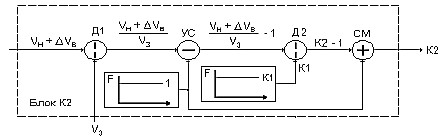
На рис.2.1 приведена структурная схема расчетного узла по вычислению коэффициента К2.

На рис.2.2 приведена структурная схема формирователя сигнала цепи обратной связи Vос.

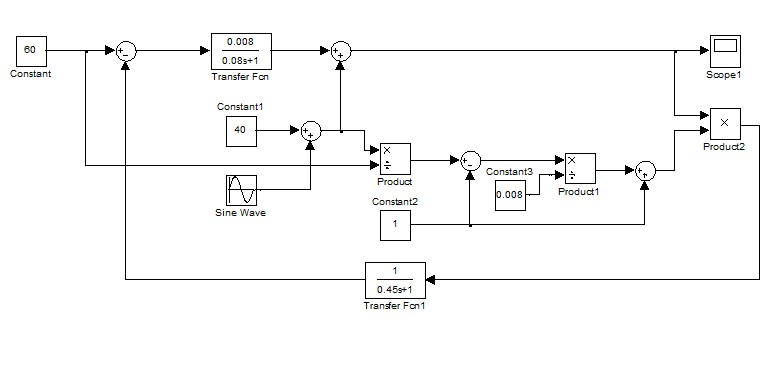
На рис.2.3 приведена структурная схема модели системы автоматического регулирования скорости движущегося объекта с использованием комбинированного управления, составленная в программе Simulink.

Графики изменения фактической скорости Vф при среднем значении T2 = 0,45 с приведены на рис.2.4–2.6. Моделирование выполнялось при трех значениях частоты изменения возмущающего сигнала 0,5; 0,25 и 0,125 рад/с.
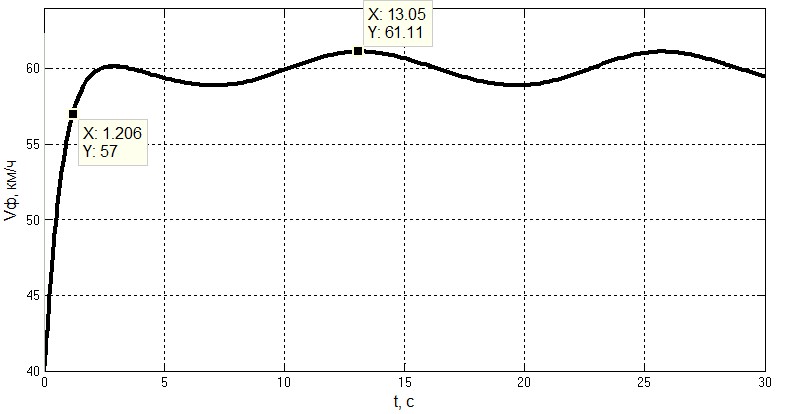

Определяем:
tр = 1,206 с; ДV = 61,11 – 60 = 1,11 км/ч; ![]()
![]() .
.
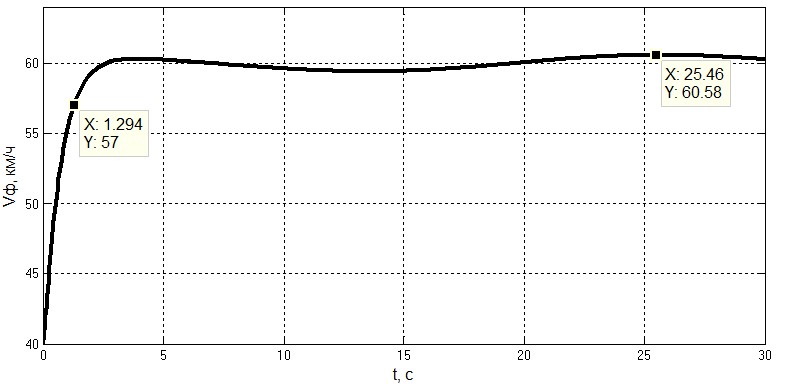

Определяем:
tр = 1,294 с; ДV = 60,58 – 60 = 0,58 км/ч; ![]()
![]() .
.
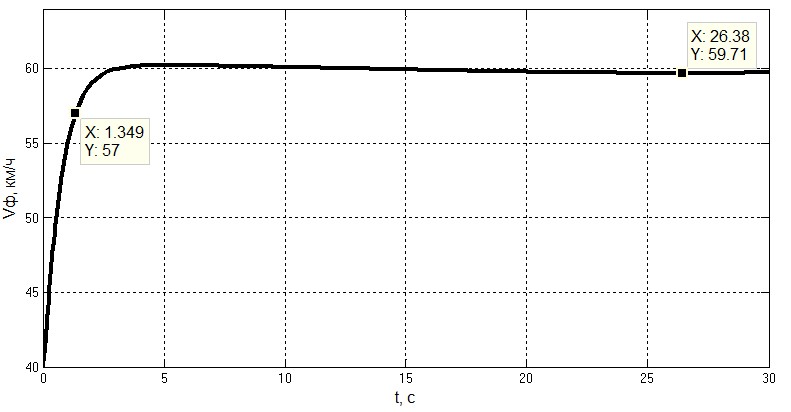

Определяем:
tр = 1,349 с; ДV = 60,29 – 60 = 0,29 км/ч; ![]()
![]() .
.
Аналогичные измерения выполняем при двух других значениях постоянной времени цепи обратной связи: T2min = 0,045 с и T2max = 2,25 с. Результаты моделирования приведены на рис.2.7–2.12.
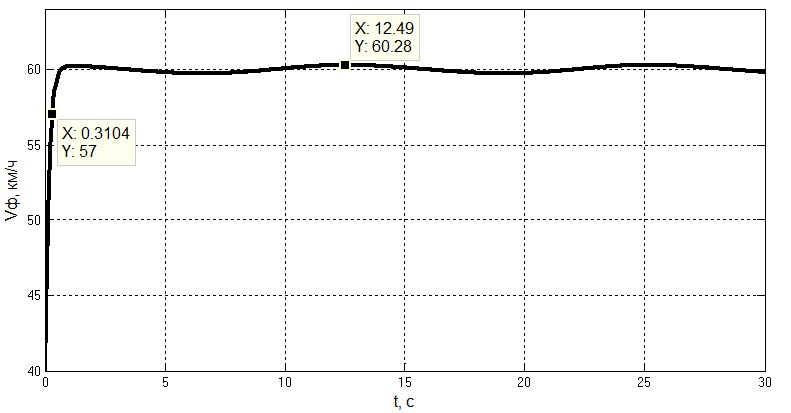

Определяем:
tр = 0,310 с; ДV = 60,28 – 60 = 0,28 км/ч; ![]()
![]() .
.
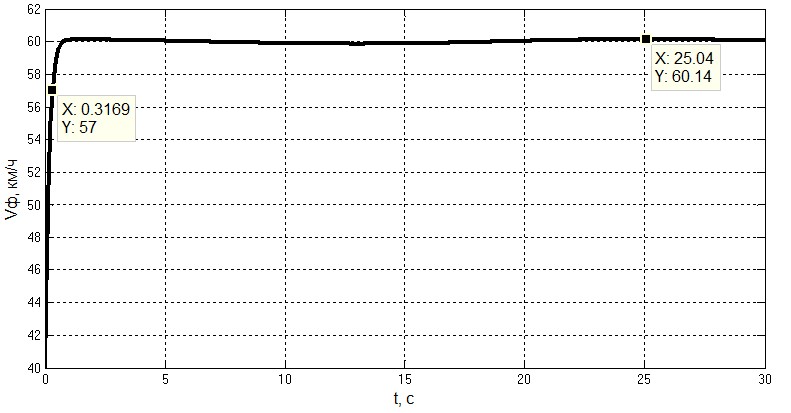

Определяем:
tр = 0,317 с; ДV = 60,14 – 60 = 0,14 км/ч; ![]()
![]() .
.
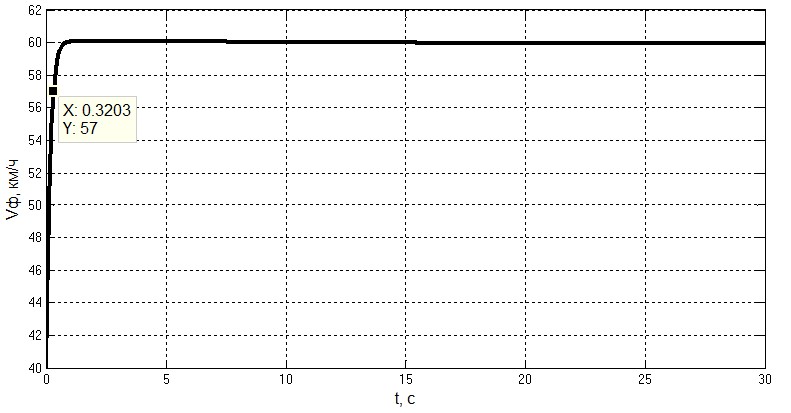

Определяем:
tр = 0,320 с; ДV = 0 км/ч; ![]()
![]() .
.
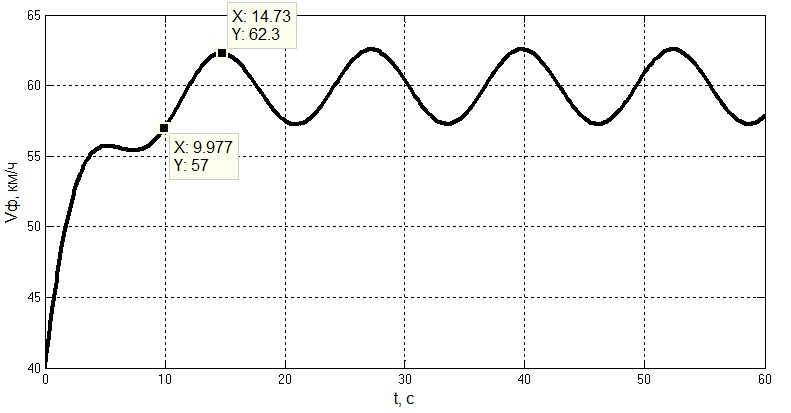

Определяем:
tр = 9,977 с; ДV = 62,3 – 60 = 2,3 км/ч; ![]()
![]() .
.


Определяем:
tр = 4,981 с; ДV = 61,94 – 60 = 1,94 км/ч; ![]()
![]() .
.
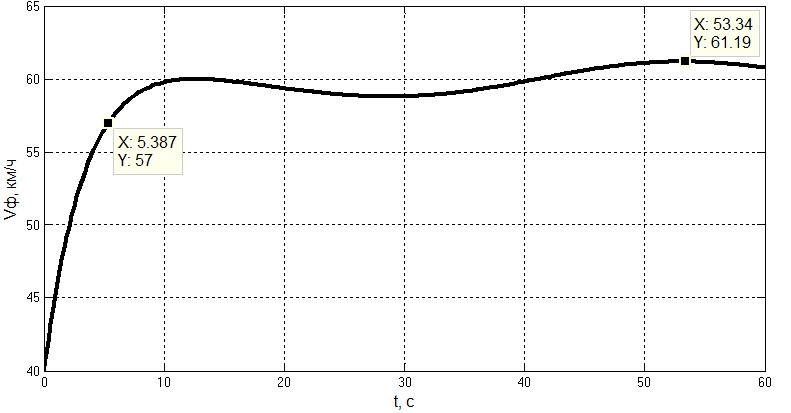

Определяем:
tр = 5,387 с; ДV = 61,19 – 60 = 1,19 км/ч; ![]()
![]() .
.
Показатели качества переходного процесса при изменении постоянной времени T2 и частоты щ сведем в табл.2.1.
Таблица 2.1 Показатели качества переходного процесса
tр, с | ДV, км/ч | д, % | ||
T2 = 0,45 с | щ = 0,5 рад/с | 1,206 | 1,11 | 1,85 |
щ = 0,25 рад/с | 1,294 | 0,58 | 0,97 | |
щ = 0,125 рад/с | 1,349 | 0,29 | 0,48 | |
T2 = 0,045 с | щ = 0,5 рад/с | 0,310 | 0,28 | 0,47 |
щ = 0,25 рад/с | 0,317 | 0,14 | 0,23 | |
щ = 0,125 рад/с | 0,320 | 0 | 0 | |
T2 = 2,25 с | щ = 0,5 рад/с | 9,977 | 2,3 | 3,83 |
щ = 0,25 рад/с | 4,981 | 1,94 | 3,23 | |
щ = 0,125 рад/с | 5,387 | 1,19 | 1,98 |
Анализируя графики рис.2.4–2.12 и данные табл.2.1, можно сделать следующие выводы:
1) уменьшение постоянной времени T2 улучшает показатели качества, снижает инерционность системы (уменьшаются время переходного процесса, абсолютная величина ошибки и перерегулирование);
2) уменьшение частоты щ внешнего возмущения также улучшает показатели качества (уменьшаются абсолютная величина ошибки и перерегулирование);
3) изменение щ не оказывает существенного влияния на время переходного процесса, если период изменения внешнего возмущения Tв >> T2; при увеличении щ время переходного процесса незначительно уменьшается;
4) в случаях, когда значения Tв и T2 сопоставимы, изменение щ оказывает неоднозначное влияние на время переходного процесса.
Список использованных источников
1. Боровков указания к контрольной работе №2 по дисциплине «Теория автоматического управления» для студентов III курса специальности СОДП, специализаций СА, СТ, СЭ. – М.: МИИТ, 2013. – 27 с.
2. Мироновский в MATLAB: Учеб. пособие/ , . – СПб.: ГУАП, 2006. – 164 с.
