

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Оглавление
Введение 3
Динамика машин и механизмов 4
Расчет динамики нагрузки на с/х технику 9
Заключение 18
Список литературы 19
Введение
Сельское хозяйство связано со многими отраслями промышленности (пищевой, химической и др.), образуя агропромышленный комплекс, основной задачей которого является надежное обеспечение страны продовольствием и сельскохозяйственным сырьем.
По мере развития научно-технического процесса и индустриализации (комплексной механизации) сельского хозяйства происходит повышение производительности труда во всех отраслях растениеводства и животноводства, хотя и сохраняются различия в затратах живого труда между более трудоемкими культурами (ягоды, фрукты, овощи) и менее трудоемкими (зерновые).
Таким образом, сочетания природных и экономических факторов обусловливают специализацию сельского хозяйства, а также способы организации земледелия и животноводства, приводящие к территориальной дифференциации уровней интенсивности производства.
Сельскохозяйственные машины применяются для подготовки почвы под посадку с/х культур, самой посадки или посева с/х культур, ухода за посевами и посадками, уборки выращенного урожая, а также его послеуборочной обработки, сохранности и придания наилучшего товарного вида. Поэтому с/х машины разделяются на отдельные типы.
Динамика машин и механизмов
Динамика машин и механизмов, раздел теории машин и механизмов, в котором изучается движение механизмов и машин с учётом действующих на них сил. Д. м. и м. решает следующие основные задачи: установление законов движения звеньев механизмов, регулирование движения звеньев, нахождение потерь на трение, определение реакций в кинематических парах, уравновешивание машин и механизмов1.
Определение законов движения звеньев механизма по заданным характеристикам внешних сил решают с помощью дифференциальных уравнений движения механической системы или машинного агрегата, состоящего обычно из двигателя, передаточного механизма, рабочей машины и иногда управляющего устройства. Число уравнений равняется числу степеней свободы этой механической системы. В плоских механизмах с одной степенью свободы для удобства решения задачи все силы и массы приводят к одному звену или точке механизма, которые называются звеном приведения или точкой приведения. Условный момент, приложенный к звену приведения, называется моментом приведения. Момент приведения равен совокупности всех моментов и сил, приложенных к звеньям механизма. Условный момент инерции звена приведения называется приведённым моментом инерции. Кинетическая энергия звена приведения равна сумме кинетических энергий всех звеньев механизма. Аналогично определяют приведённые силу и массу в точке приведения (рис., а):
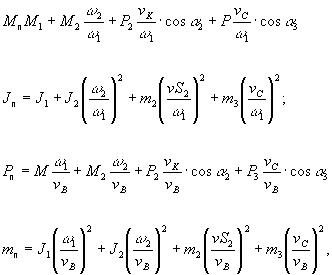
где Мп — приведённый момент; Jп — приведённый момент инерции; Рп — приведённая сила; mп — приведённая масса; M1, M2, P2, P3 — моменты и силы, приложенные к звеньям механизма; w1, w2 — угловые скорости звеньев; uB, uC — скорости точек В и С механизма; uS2 — скорость центра тяжести звена 2; uK — скорость точки К приложения силы P2; a2 — угол между векторами P2 и uK; a3 — угол между векторами P3 и uC. Уравнение движения для данного случая:
![]()
т. е, Мп в общем случае зависит от времени, положения, скорости.
Уравнения движения обычно являются нелинейными. Методов точного решения их не существует, поэтому пользуются приближёнными графическими, графо-аналитическими и численными методами интегрирования. Установить закон движения механической системы сложнее, если учитывать трение и зазоры в кинематических парах, упругость и переменность масс звеньев. Иногда, например при изучении быстротекущих процессов в машинах, некоторые внешние силы нельзя считать заданными, т. к. движение механизма может оказать обратное воздействие на характеристику этих сил. Например, в некоторых режимах с большими ускорениями нельзя принимать механическую характеристику электродвигателя как заданную зависимость момента на валу двигателя от угловой скорости, т. к. на этот момент существенное влияние могут оказать электромагнитные процессы в электродвигателе. В этом случае к дифференциальным уравнениям движения механической системы добавляют дифференциальное уравнение электромагнитных процессов в электродвигателе и решают их совместно2.
Вопросы регулирования движения машинного агрегата и управления им рассматриваются в теории регулирования. Различают неустановившийся, переходный и установившийся режимы движения. При установившемся режиме скорости точек механизма являются периодическими функциями времени или положения или остаются постоянными. Регулирование установившегося движения сводится к обеспечению угловой скорости звена приведения, не превышающей допустимого отклонения от её значения. Для этого рассчитывают и устанавливают на машину специальную массу — маховик. Необходимость регулирования неустановившегося движения возникает в том случае, когда, несмотря на непериодическое изменение внешних сил или масс, в механизме требуется поддерживать среднюю скорость звена приведения постоянной. Для этого на машину устанавливают специальные автоматические регуляторы. Основной задачей при этом является определение устойчивости движения системы машина — регулятор. Если же скорость какого-либо звена (или др. параметра) нужно изменять по заданному закону (программе), то в машину встраивают программное устройство. Примером может служить программное управление металлорежущими станками. Конкретная задача, рассматриваемая теорией регулирования, — отыскание оптимальных режимов движения машин (оптимальное управление). Например, определение движения с наибыстрейшим переходным режимом при ограниченном ускорении, т. е. оптимального по быстродействию, или движения с минимумом затрачиваемой в переходном режиме энергии, т. е. оптимального по потерям.
Нахождение непроизводительных потерь в машинах сводится к определению потерь на трение, которые являются основными и влияют на эффективность работы машин и механизмов. Степень использования энергии в машине оценивается механическим кпд3.
Кинетостатический расчёт механизмов, выполняемый при известном законе движения механизма, производится определением реакций в кинематических парах от всех заданных внешних сил, а также сил инерции звеньев и сил трения в кинематических парах. Значения этих реакций входят в расчёты звеньев на прочность и необходимы для подбора подшипников и расчёта их смазки.
Уравновешивание машин и механизмов осуществляется рациональным подбором и размещением противовесов, снижающих динамические давления в кинематических парах механизмов. На практике осуществляют уравновешиванием машины на фундаменте (предотвращение вибраций) или уравновешиванием вращающихся масс — балансировкой. Инерционные силы в современных быстроходных машинах достигают больших значений. Переменные по величине и направлению силы инерции нарушают нормальную работу узлов машины, являются источником вибраций и шума, которые вредно воздействуют на обслуживающий персонал и нарушают нормальную работу др. механизмов и приборов. В вибрационных машинах рассчитывают условия создания интенсивных колебаний их исполнительных органов. Динамические исследования в машинах непосредственно связаны с расчётами на прочность и жёсткость элементов машин, которые проводятся с целью выбора размеров и конструктивных форм деталей. Методы таких расчётов обычно излагаются в учебных дисциплинах: сопротивление материалов, динамика сооружений, детали машин.
Динамические исследования проводят также для пространственных механизмов со многими степенями свободы. Системы подобного типа обладают большой универсальностью выполняемых операций4.
Расчет динамики нагрузки на с/х технику
Необходимые тяговые показатели с/х машин могут быть достигнуты и эффективно использованы только в том случае, если будут правильно выбраны основные его параметры: масса, скорости движения (передаточные числа трансмиссии) и мощность двигателя. Эти параметры определяют при тяговом расчете трактора.
Исходные данные к тяговому расчету выбирают с учетом места, занимаемого рассматриваемым трактором в типаже! Трактор должен быть рассчитан на выполнение всех работ, соответствующих его тяговому классу, и некоторой части работ, относящихся к тяговой зоне соседнего с ним предыдущего класса. Перекрытие тяговых зон позволяет выполнять некоторые работы тракторами смежных классов, что расширяет сферу применения имеющихся в хозяйстве тракторов каждого класса.
Назовем отношение номинальной силы тяги на крюке, установленной для трактора данного класса, к минимальной силе тяги на крюке, на которую он должен быть рассчитан, расчетным тяговым диапазоном трактора и обозначим его через 6Т-Тяговый диапазон определяют по формуле
![]()
где Рн и Ргн— соответственно номинальная сила тяги (по заданию) и сила тяги трактора предыдущего класса; е — коэффициент расширения тяговой зоны трактора, рекомендуемый в среднем 1,3. Для тракторов класса тяги 0,2 ... 0,6 тяговый диапазон можно принять.
Зная тяговый диапазон и номинальную силу тяги трактора, можно определить его минимальную силу тяги из соотношения
![]() откуда
откуда ![]() .
.
Дальнейший этап тягового расчета — выбор массы трактора. Следует различать конструктивную (сухую) массу т0 и эксплуатационную (полную) массу т9. Под конструктивной массой будем понимать массу трактора в незаправленном состоянии, без тракториста, инструментов, дополнительного оборудования и балласта.
Масса трактора оценивается его состоянием. Если трактор не имеет заправочных материалов, балласта и тракториста, то такая масса называется конструктивной (тк). Полностью заправленный трактор с трактористом и балластом будет иметь массу эксплуатационную (тэ).
Эксплуатационную массу колесного трактора можно определить из следующих условий:
![]() (условия по сцеплению),
(условия по сцеплению),
![]() (условия по типажу)
(условия по типажу)
откуда ![]() . При условии равенства будем иметь
. При условии равенства будем иметь
![]() ,
,
где Рн — номинальная сила тяги трактора по типажу, Н;
цдоп — допустимая величина коэффициента использования сцепного веса трактора; для колесных тракторов принимается 0,5—0,65; для гусеничных — 0,55—0,65;
лк — коэффициент нагрузки на ведущие колеса трактора; принимается для тракторов: с колесной схемой 4X2—0,75—0,8; для колесных 4X4 и гусеничных лк = 1;
f — коэффициент сопротивления качению; для колесных тракторов можно принять 0,12, для гусеничных — 0,08.
Применительно к гусеничным тракторам и колесным со схемой 4X4 эксплуатационная масса (тэ) может быть определена по формуле ![]() , конструктивная масса -
, конструктивная масса -
![]() ,
,
где тв —масса воды;
mrсм — масса горюче-смазочных материалов;
тч — масса инструмента и запасных частей;
тб — масса балласта;
ттр —масса тракториста.
Для большинства сельскохозяйственных тракторов эксплуатационную массу можно определить по следующему выражению:
тэ= (1,07—1,1)тк.
Учитывая значительное перераспределение веса между передними и задними колесами при работе с большой нагрузкой на крюке, для тракторов с задними ведущими колесами принимают Лк=0,75...0,80, для тракторов со всеми ведущими колесам» Як = 1.
Вследствие разнообразия выполняемых работ на тракторах должны быть передачи трех групп: вспомогательные — для получения особо низких скоростей движения (они предназначены для работ, при которых допускаемые скорости движения ограничиваются условиями выполняемого технологического процесса); основные — для выполнения большинства сельскохозяйственных операций; транспортные — для перевозки грузов и холостых переездов. Характерный пример работы с особо низкими скоростями — посадка рассады. При этом скорость движения, м/с = 60,
Для выполнения некоторых работ, например мелиоративных, требуются еще более низкие скорости движения трактора — 0,028 ...0,056 м/с, которые иногда называют «ползучими». Для получения столь низких скоростей приходится устанавливать специальный ходоуменьшитель.
Основные передачи трактора необходимо выбирать с учетом принятого диапазона тяговых усилий на крюке и требований агротехники относительно допускаемых скоростей работы на различных сельскохозяйственных операциях.
Для расчета ряда основных рабочих скоростей трактора определяется диапазон скоростей, который характеризуется отношением высшей рабочей скорости к скорости на первой передаче
![]() ,
,
где Vн1 - расчетная скорость на первой передаче (по заданию) принимается в км/ч;
Vz - высшая рабочая скорость, которую необходимо определить.
Величина скоростного диапазона подсчитывается по формуле
![]() ,
,
где гдопmin — коэффициент, допустимой минимальной загрузки
двигателя. Рекомендуется принимать равным 0,85.
Для расчета высшей и промежуточных скоростей необходимо определить знаменатель геометрической прогрессии — q.
Зная, что ![]() , можно получить
, можно получить
V2=V1·q; V3=V2 ·q=V1 ·q2; V4=V1 ·q3; …VZ=V1 ·qz-1;
отсюда
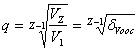 .
.
Определив знаменатель геометрической прогрессии, подсчитывают скорости V2, V3, V4 … VZ.
Высшая транспортная скорость в геометрическую прогрессию не входит. Промежуточную транспортную скорость определяют как среднюю геометрическую величину между высшей транспортной и высшей скоростью основного ряда по формуле:
Vmp 2 = ![]() или Vтр 2 = 0,2 (Vmр max+Vz).
или Vтр 2 = 0,2 (Vmр max+Vz).
Если предусматривается использование трактора для посадочных работ, тогда скорость его движения может быть определена по формуле:
![]() , км/ч
, км/ч
где lгн — расстояние между посадочными гнездами, м;
х - число растений, которые рабочий успевает подавать в машину за 1 минуту.
Для получения особо низких скоростей в трансмиссию трактора устанавливается специальный ходоуменьшитель. Величина этих скоростей принимается согласно технологическому процессу.
Окончательный ряд скоростей корректируется в соответствии с практическими возможностями подбора чисел зубьев шестерен коробки передач проектируемого трактора.
Требуемую мощность тракторного двигателя определяют исходя из установленных предыдущими расчетами тяговых и скоростных параметров трактора. При этом следует учитывать следующую особенность тягового режима: силы сопротивления движению тракторного агрегата имеют неустановившийся характер и во время работы непрерывно колеблются в широких пределах. Колебания нагрузки происходят в результате влияния микрорельефа поля, неоднородности почвы, особенностей технологического процесса выполняемой сельскохозяйственной операции, неравномерности сопротивления качению и многих других факторов.
Вследствие колебательного характера нагрузки необходимо резервировать некоторую часть мощности тракторного двигателя для преодоления систематически возникающих пиковых значений сопротивления движению. Некоторый резерв мощности может также потребоваться для обеспечения разгона тракторного агрегата без переключения передач.
Поэтому тракторный агрегат следует комплектовать таким образом, чтобы его средний приведенный к коленчатому валу момент сопротивления был несколько меньше номинального крутящего момента двигателя. Отношение указанных моментов, называемое коэффициентом эксплуатационной нагрузки тракторного двигателя, изменяется в пределах 0,8... 0,85 в зависимости от динамических качеств двигателя и колебаний сопротивлений движению трактора. При определении требуемой мощности тракторного двигателя резерв учитывают в расчетной формуле указанным коэффициентом.
Отношение расчетной мощности двигателя к массе трактора называют удельной мощностью трактора. Ее определяют по следующей формуле:
уд = ЛГ
Удельная мощность уд является важным параметром, характеризующим энергонасыщенность трактора. Повышение удельной мощности трактора позволяет соответственно повысить его рабочие (основные) скорости.
Понятие, обратное удельной мощности, — удельная масса /Пуд. Этот измеритель обычно используют для характеристики металлоемкости трактора. Под удельной массой, кг/кВт, понимают отношение конструктивной массы трактора к номинальной мощности установленного на нем двигателя, т. е.
уд = кг/кВт.
Для колесных тракторов уд «40 ...50 кг/кВт, а для гусеничных уд 80 кг/кВт. По мере совершенствования конструкций тракторов удельная масса их постоянно снижается5.
Заключение
Долгое время наша отечественная промышленность была ориентированна на создание энергонасыщенных с/х машин высоких тяговых классов, в данный момент времени - это экономически не эффективно, так как увеличивается себестоимость продукции, а также из-за реорганизации форм собственности на сельскохозяйственные угодья. Важнейшим направлением научных исследований, по вопросу повышения эффективности использования тракторного парка и повышению тягово-сцепных свойств колесных машин, является переход на полноприводные с шинами равного размера. Основные факторы, определяющие тягово-сцепные качества колесных машин, можно разделить на конструктивные и эксплуатационные. Конструктивными факторами являются: колесная формула, конструкция шин, вид привода, увеличение сцепного веса, компоновка техники. К эксплуатационным - давление воздуха в шинах, точка приложения крюковой силы и т. д.; агрегатируемая сельскохозяйственная машина и т. д. В настоящие время по своим тягово-сцепным свойствам полноприводные, с шинами равного размера, значительно превышают полноприводные с различными размерами шин, а на определенных агрофонах приближаются к гусеничным. Поэтому разработка и развитие данного направления является актуальной и имеет важное народохозяйственное значение.
Список литературы
Техническое обслуживание и ремонт сельскохозяйственных машин, , Энергетика. Промышленность, 2009 г. Материалы сайта http://www. avtomash. ru/ Сельскохозяйственные машины, , Изд: КолосС, 2008 г. Современные тенденции мирового сельскохозяйственного машиностроения. Издание , «Астарта дизайн», 2009 г. Прогноз развития тракторной и сельскохозяйственной техники до 2010 г. Раздел II.1 Сельскохозяйственные машины, , Изд: КолосС, 2008 г.
2 Техническое обслуживание и ремонт сельскохозяйственных машин, , Энергетика. Промышленность, 2009 г.
3 Современные тенденции мирового сельскохозяйственного машиностроения. Издание , «Астарта дизайн», 2009 г.
4 Прогноз развития тракторной и сельскохозяйственной техники до 2010 г. Раздел II.
5 Сельскохозяйственные машины, , Изд: КолосС, 2008 г.
