

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

Оглавление
Введение 3
Метод Циглера – Никольса настройки параметров регулятора 5
Типовой П – регулятор 7
Типовой ПИ – регулятор 8
Типовой ПИД – регулятор 9
Список использованных источников 27
Введение
Автоматическое управляющее устройство состоит измерительного устройства, элемента сравнения и регулятора. Регулятор, на вход которого поступает сигнал ошибки, формирует управляющие воздействие непосредственно на объект управления в соответствии с заданным алгоритмом управления. Алгоритм управления описывается передаточной функцией.
Выбор алгоритма управления является основной задачей в процессе проектирования. Синтез регуляторов, дающих наилучшие показатели качества управления, как правило, представляют собой сложную задачу. С другой стороны, в виду сложности и реализация таких регуляторов часто оказывается экономически неоправданной. Во многих случаях для автоматизации производственных процессов используются простейшие и наиболее распространенные типы линейных регуляторов.
Пропорциональный регулятор. Если объект управления не содержит интегрирующих звеньев, то система с П - регулятором является статической. Регулирование в этом случае характеризуется наличием статической ошибки, уменьшение которой ограниченно условиями устойчивости.
Пропорционально – интегральный регулятор. Управляющие воздействие, формируемое на выходе регулятора содержит пропорциональную и интегральную составляющие. Достоинством ПИ-регулятора является то, что он устраняет статическую ошибку, обусловленную возмущением. Однако введение интегральной составляющей в регулятор ухудшает условия устойчивости.
Пропорционально-интегрально– дифференциальный регулятор. Управляющие воздействие, формируемое регулятором, содержит, кроме пропорциональной и интегральной составляющих, третью составляющую, пропорциональную производной сигнала ошибки. В большинстве случаев с помощью правильного построенного ПИД-регулятора удается выполнить все требования к системе. Согласно статистики более 90% промышленных регуляторов представляют собой именно ПИД-регуляторы.
Метод Циклера-Никольса настройки регуляторов, относится к эмпирическим и основан на использовании данных, полученных экспериментально на реальном объекте. Наибольшую известность получили два варианта настройки параметров регулятора по методу Циглера - Никольса.
Метод Циглера – Никольса настройки параметров регулятора
Этот метод, предложенный в 1943г., относится к эмпирическим и основан на использовании данных, полученным экспериментально на реальном объекте.
В данном случае, используется реакция объекта на ступенчатое изменение управляющего воздействия.
Вариант 7
Таблица 1. Исходные данные
К1 | 1 | Т1 | 0.7 |
К2 | 2 | Т2 | 2.7 |
К3 | 3 | Т3 | 3.7 |
Из данных рисунков получим: ![]()
![]() с – время запаздывания;
с – время запаздывания;
![]()
![]() с - постоянная времени;
с - постоянная времени;
![]()
![]() - коэффициент усиления объекта.
- коэффициент усиления объекта.
Формулы для расчета параметров регуляторов приведены в таблице 2.
Таблица 2
|
|
| |
П – Регулятор |
| ||
ПИ - Регулятор |
|
| |
ПИД - Регулятор |
|
|
|
Параметры регуляторов приведены в таблице 3.
Таблица 3
|
|
| |
П – Регулятор | 0.7143 | ||
ПИ - Регулятор | 0.6429 | 0.3061 | |
ПИД - Регулятор | 0.8571 | 0.6122 | 0.4286 |
Одним из важнейших этапов компьютерного моделирования систем, позволяющим оценить результаты, является расчет переходных процессов. Программное обеспеченье на основе пакета MATLAB – Simulink позволяет успешно выполнить такой расчет.
Типовой П – регулятор
Схема расчетной модели типового П – регулятора будет иметь вид, показанный на рисунке 1, график рисунок 2.
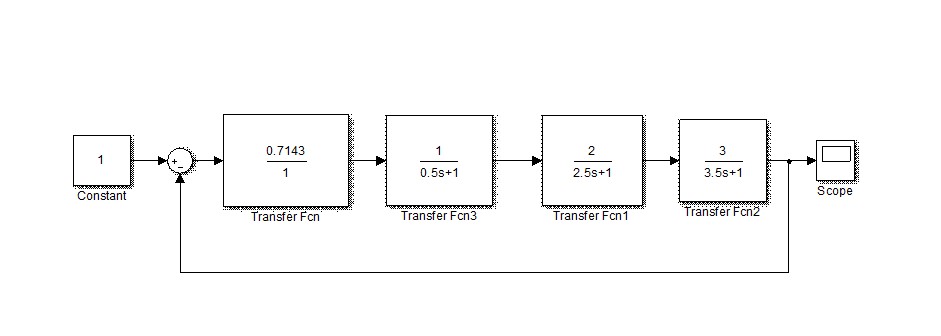
Рис. 1. Схема модели системы с П - регулятором
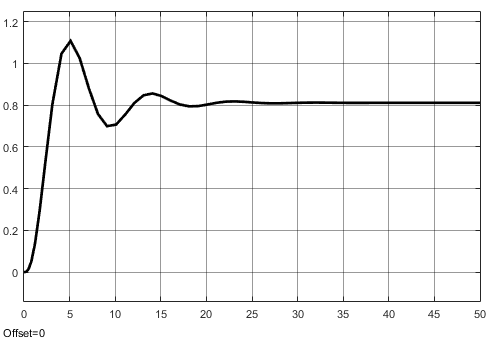
Рис. 2. График переходного процесса в системе П - регулятором
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением П – регулятора перерегулирование составляет 37.5%.
Типовой ПИ – регулятор
Схема расчетной модели типового ПИ – регулятора будет иметь вид, показанный на рисунке 3, график рисунок 4.
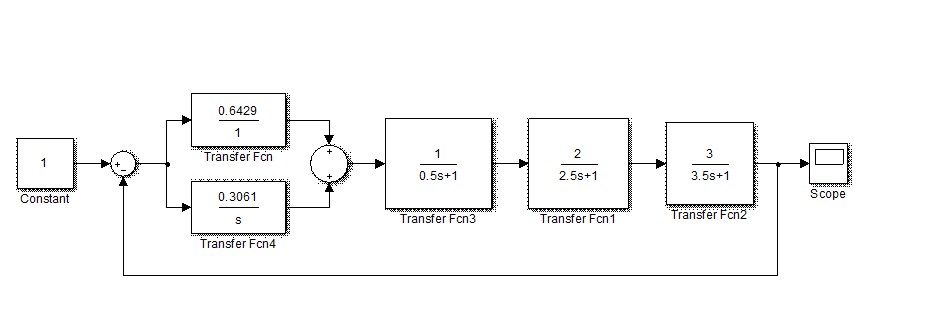
Рис. 3. Схема модели системы с ПИ - регулятором

Рис. 4. График переходного процесса в системе с ПИ - регулятором
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением П – регулятора перерегулирование составляет 75.7282%.
Типовой ПИД – регулятор
Схема расчетной модели типового ПИД – регулятора будет иметь вид, показанный на рисунке 5, график рисунок 6.
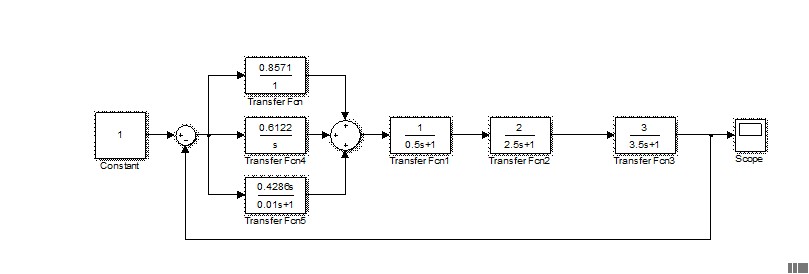
Рис. 5. Схема модели системы с ПИД - регулятором
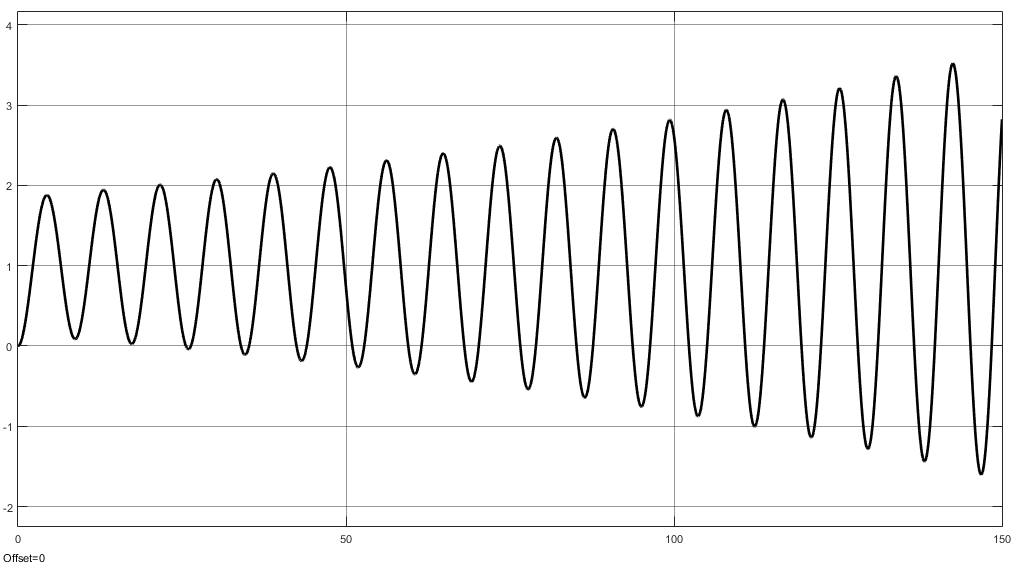
Рис. 6. График переходного процесса в системе с ПИД - регулятором
Числовые параметры для статических объектов
Регулятор | Типовой процесс регулирования | ||
апериодический | С 20% перерегулированием |
| |
П |
|
| |
ПИ |
|
|
|
ПИД |
|
|
|
Таблица 4
Регулятор | Типовой процесс регулирования | ||
апериодический | С 20% перерегулированием |
| |
П |
| | |
ПИ |
|
|
|
ПИД |
|
|
|
Схема модели П – регулятора с настройкой на апериодический процесс будет иметь вид, показанный на рисунке 7, график рисунок 8.
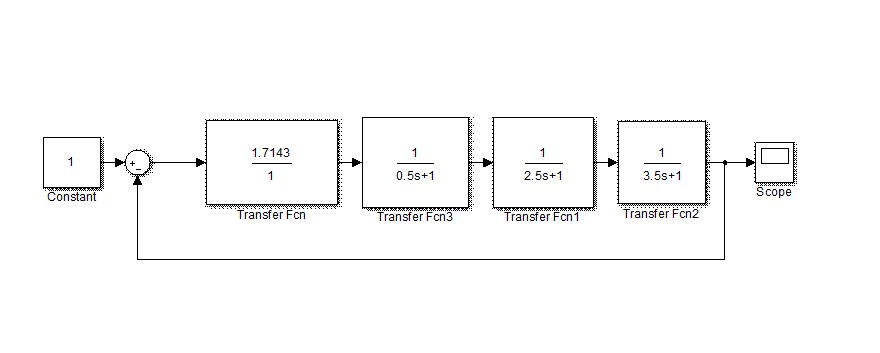
Рис. 7. Схема модели системы с П – регулятором, при настройке на апериодический процесс
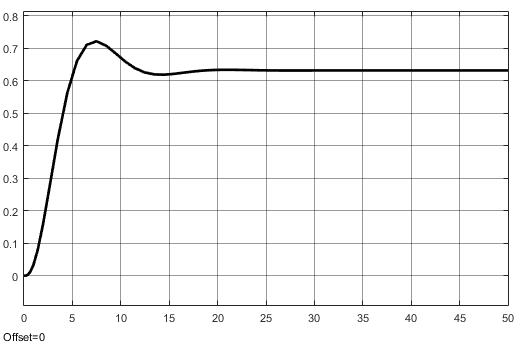
Рис. 8. График переходного процесса в системе с П - регулятором при настройке на апериодический процесс
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением П – регулятора с настройкой на апериодический процесс, перерегулирование составляет 14.2857%.
Схема модели П – регулятора с 20% перерегулированием будет иметь вид, показанный на рисунке 9, график рисунок 10.
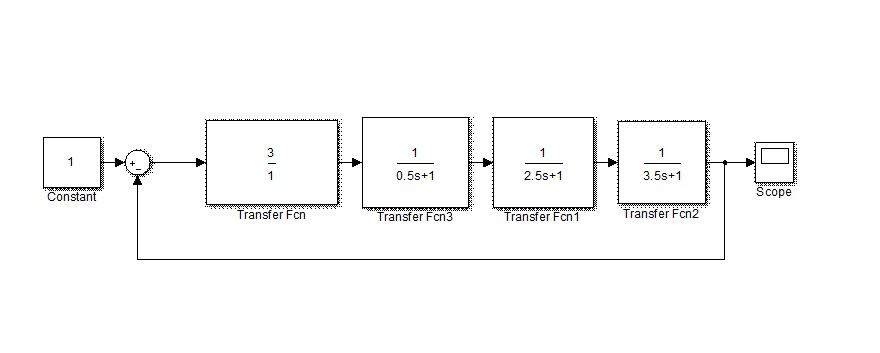
Рис. 9. Схема модели системы с П - регулятором с 20% перерегулированием
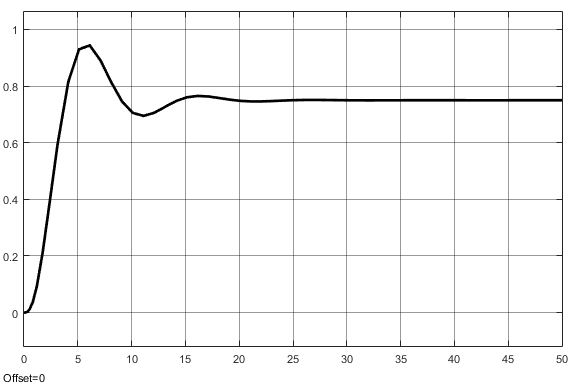
Рис. 10. График переходного процесса в системе с П - регулятором с 20% перерегулированием
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением П – регулятора с настройкой на 20% перерегулирование, перерегулирование составляет 25.3333%.
Схема модели ПИ – регулятора с настройкой на апериодический процесс будет иметь вид, показанный на рисунке 11, график рисунок 12.
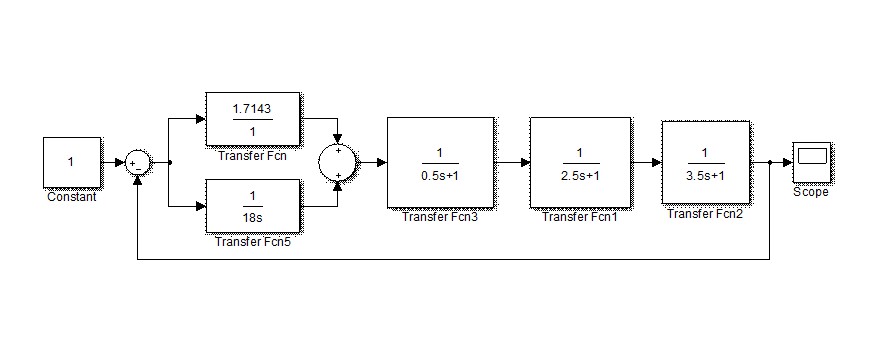
Рис. 11. Схема модели системы с ПИ – регулятором, при настройке на апериодический процесс
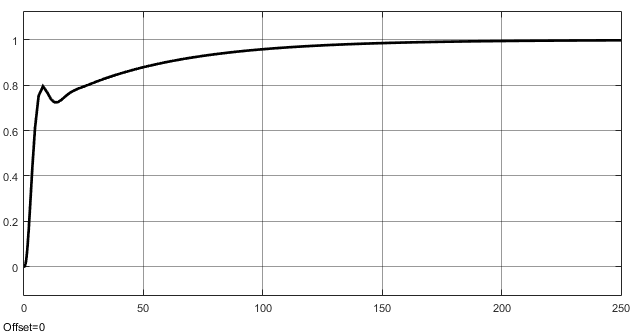
Рис. 12. График переходного процесса в системе с ПИ - регулятором при настройке на апериодический процесс
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением ПИ – регулятора с настройкой на апериодический процесс, перерегулирование составляет 0%.
Схема модели ПИ – регулятора с 20% перерегулированием будет иметь вид, показанный на рисунке 13, график рисунок 14.
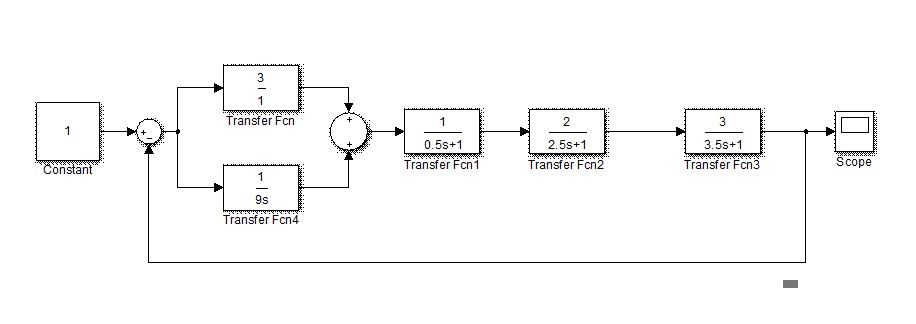
Рис. 13. Схема модели системы с ПИ - регулятором с 20% перерегулированием

Рис. 14. График переходного процесса в системе с ПИ - регулятором с 20% перерегулированием
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением ПИ – регулятора с настройкой на 20% перерегулирование, перерегулирование составляет 2%.
Схема модели ПИ – регулятора с настройкой обеспечивающей минимум интегрального критерия качества будет иметь вид, показанный на рисунке 15, график рисунок 16.
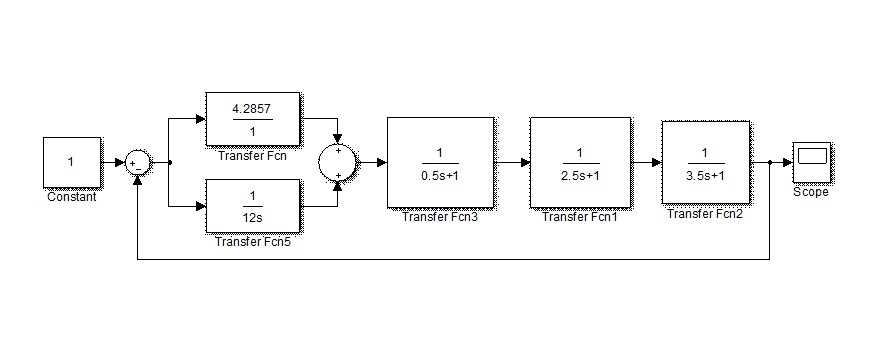
Рис. 15. Схема модели системы с ПИ – регулятором с настройкой обеспечивающей минимум интегрального критерия качества
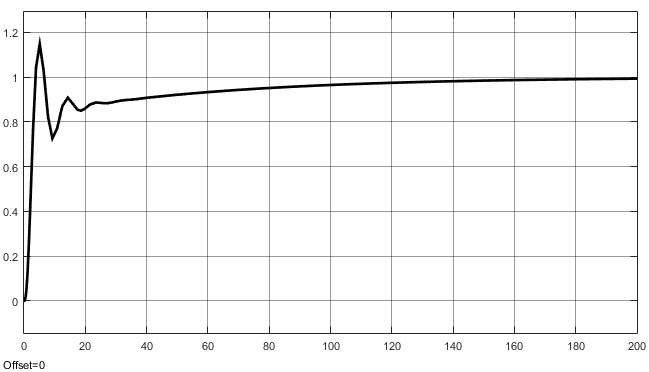
Рис. 16. График переходного процесса в системе с ПИ - регулятором с настройкой обеспечивающей минимум интегрального критерия качества
Из данного графика найдем высоту выкида функции ![]()
![]() 147,
147,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением ПИ - регулятора с настройкой обеспечивающей минимум интегрального критерия качества перерегулирование составляет 14.7%.
Схема модели ПИД – регулятора с настройкой на апериодический процесс будет иметь вид, показанный на рисунке 17, график рисунок 18.
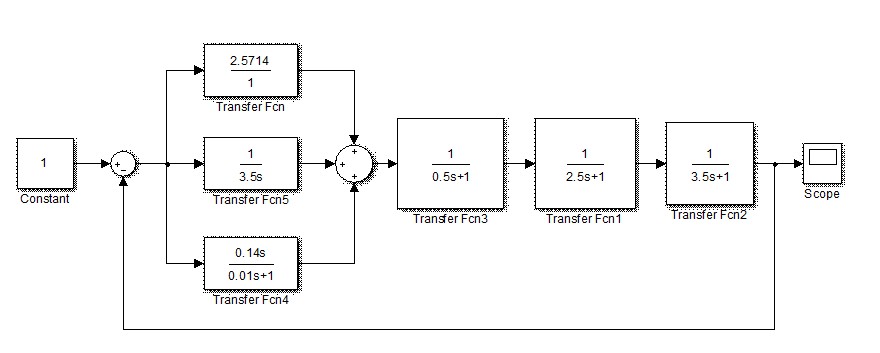
Рис. 17. Схема модели системы с ПИД – регулятором, при настройке на апериодический процесс
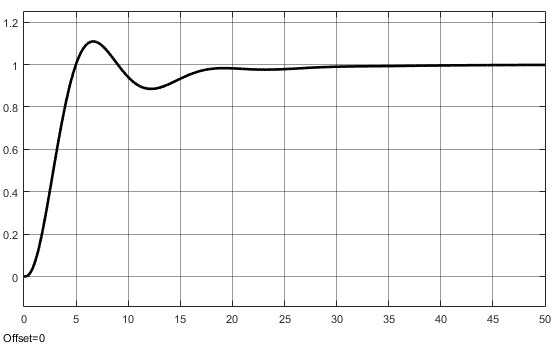
Рис. 18. График переходного процесса в системе с ПИД - регулятором при настройке на апериодический процесс
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением ПИД – регулятора с настройкой на апериодический процесс, перерегулирование составляет 10%.
Схема модели ПИД – регулятора с 20% перерегулированием будет иметь вид, показанный на рисунке 19, график рисунок 20.
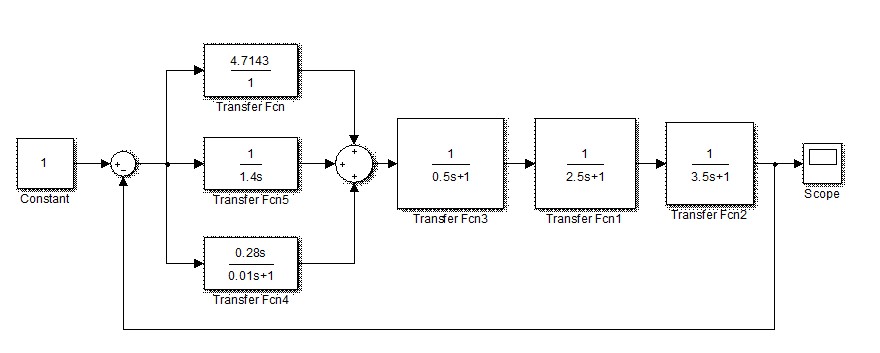
Рис. 19. Схема модели системы с ПИД - регулятором с 20% перерегулированием
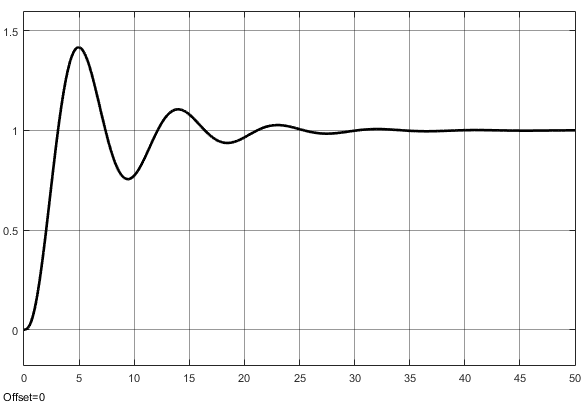
Рис. 20. График переходного процесса в системе с ПИД - регулятором с 20% перерегулированием
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением ПИД – регулятора с настройкой на 20% перерегулирование, перерегулирование составляет 41.7%.
Схема модели ПИД – регулятора с настройкой обеспечивающей минимум интегрального критерия качества будет иметь вид, показанный на рисунке 21, график рисунок 22.
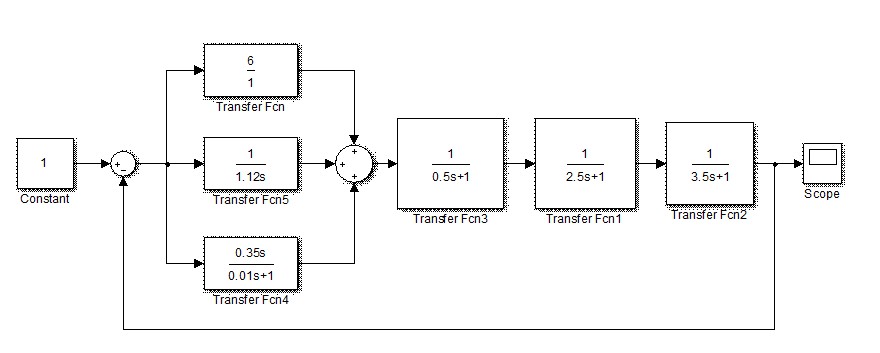
Рис. 21. Схема модели системы с ПИД – регулятором с настройкой обеспечивающей минимум интегрального критерия качества
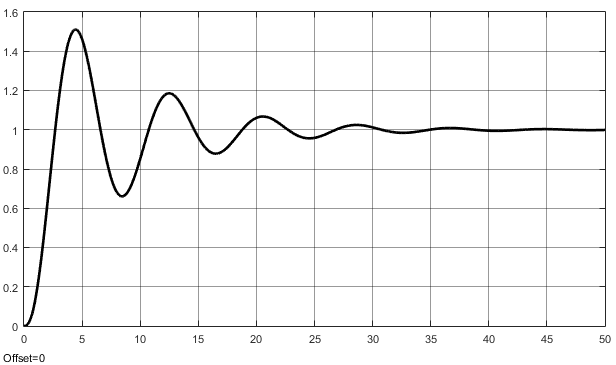
Рис. 22. График переходного процесса в системе с ПИД - регулятором с настройкой обеспечивающей минимум интегрального критерия качества
Из данного графика найдем высоту выкида функции ![]()
![]() ,
,
![]()
![]() – высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса
– высота когда функция стабилизировалась, время требуемое на стабилизацию переходного процесса ![]()
![]() с. Вычислим перерегулирование функции.
с. Вычислим перерегулирование функции.
![]()
![]() .
.
![]()
![]() .
.
В данном случае с применением ПИД - регулятора с настройкой обеспечивающей минимум интегрального критерия качества перерегулирование составляет 50.6481%.
Таблица 5. Результаты моделирования
Регулятор | Полученные характеристики Апериодический процесс регулирования | Полученные характеристики с 20% перерегулированием | Полученные характеристики обеспечивающие минимум интегрального критерия качества | Типовые регуляторы |
П | tpp=20 G=14.2857% | tpp=27 G=25.3333% | - | tpp=32 G=37.5% |
ПИ | tpp=190 G= | tpp=120 G= | tpp=180 G= | tpp=408 G= |
ПИД | tpp=35 G= | tpp=32 G= | tpp=44 G= | - |
Были рассмотрены четыре типа настройки регуляторов для заданного объекта в программе Matlab. Задача исследования заключалась в поиске оптимальных настроек регулятора для заданного объекта. При моделировании систем была использована программа Matlab (Simulink). В результате моделирования получили графики переходных процессов. Был определен закон регулирования и произведены расчеты настроек П, ПИ, ПИД - регуляторов методом Циглера-Никольса. По полученным при моделировании результатам можно сделать вывод, что система системы при настройке на типовой процесс с П – регулятором является системой с лучшими фильтрующими свойствами, чем другие предложенные для исследования регуляторы.
Список использованных источников
, , . «Системы автоматического регулирования». Под. ред. . Изд.: Ростов Н/Д: Феникс – 2015г. – 458с. , «Теория систем автоматического управления». СПб.: Изд-во «Профессия», 2008г.-752с. «Теория автоматического управления. Нелинейные и оптимальные системы.» СПб.:Питер,2006г. – 272с. , , и др. «Теория автоматического управления» учебник для вузов. Под ред. . М.:Высш. шк.2009г -567с. «Типовые элементы систем автоматического управления». Учебное пособие для студентов учреждений среднего профессионального образования. – М.:ФОРУМ: ИНФРА-М.2007г.-384с.
