

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования и науки РФ
ФГБОУ ВПО Южно-Российский государственный
политехнический университет (НПИ) имени
Искусственный машинист
водит поезда

Новочеркасск, 2013
Искусственный машинист водит поезда.
Электронное научно-популярное пособие.
Предназначено для размещения на сайте ЮРГПУ(НПИ) имени .
Разработано при поддержке гранта Министерства образования и науки РФ в рамках Федеральной целевой программы «Научные и научно-педагогические кадры инновационной России на 2009-2013 годы» (соглашение № 14.В37.21.0289).
Авторы:
, к. т.н., доцент кафедры «Автоматизации и управления технологических процессов и производств»
, д. т.н., профессор кафедры «Автоматизации и управления технологических процессов и производств», профессор
Южно-Российский государственный политехнического институт (НПИ) имени .
г. Новочеркасск, 2013 год
Машинист локомотива, как важнейшее звено сложной динамической системы "человек-поезд", выполняет ответственные и сложные управляющие операции, связанные с перемещением на значительные расстояния при больших скоростях пассажирских и грузовых поездов с учётом погодных условий и поездной ситуации [1]. При этом он должен обеспечить безопасное ведение поезда по расписанию, минимальный расход энергоресурсов, поиск и устранение возникающих в процессе движения неисправностей оборудования локомотива, влияющих на безопасность, а также быть готовым оперативно реагировать на возникающие в процессе вождения нештатные и аварийные ситуации.
Для облегчения труда локомотивной бригады для тягового подвижного состава разрабатываются и внедряются системы автоведения поездов, называемые ещё «автомашинистами». Такие системы предназначены для автоматизированного управления подвижным составом с соблюдением норм безопасности движения в соответствии с заданным временем хода (или графиком) на основе выбора энергетически рационального режима движения поезда, включая разгон и поддержание скорости, остановку на красный сигнал светофора и снижения скорости на жёлтый и белый сигналы светофора, прицельную остановку на станции, а также регистрацию параметров движения[2].
Они могут быть централизованными и автономными. Первые предполагают, что команды управления поездами рассчитываются и формируются на центральном диспетчерском пункте, после чего передаются с помощью каналов связи на борты движущихся по участкам локомотивов. Такая система характерна для метрополитенов, а также часто используется за рубежом в пределах небольших участков обслуживания с хорошо развитой телекоммуникационной инфраструктурой. Однако, в условиях больших расстояний и сложных условий движения, характерных для российских железных дорог, техническая реализация данного подхода затруднена, и поэтому для магистральных грузовых и пассажирских локомотивов, а также поездов пригородного сообщения создаются автономные системы автоведения, которые свое местонахождение и требуемые режимы движения система определяет самостоятельно.
Такие системы способствуют повышению производительности труда, позволяют экономно расходовать электроэнергию и вести учёт ее расхода [3]. Повышается безопасность движения за счёт автоматического исполнения скоростного режима движения по сигналам светофоров с учётом постоянных и временных ограничений скорости, а также путем уменьшения утомляемости машиниста. Система контролирует правильность работы функциональных узлов аппаратуры, осуществляя при этом функцию самодиагностики. В состав систем автоведения входит регистратор параметров движения.
Системы автоведения выполняют следующие функции:
- определяют фактические параметры движения поезда и выводят их на экран дисплея;
- ведут расчет рекомендуемых параметров движения поезда и управляющих воздействий в реальном времени;
- управляют тягой и торможением;
- осуществляют визуальный и звуковой диалог с машинистом;
- производят запись регистрируемых параметров на съёмный накопитель информации;
- осуществляют контроль и диагностику аппаратуры автоведения и тягового подвижного состава, а также вырабатывают рекомендации по их устранению.
Эти системы с помощью специального программно-математического обеспечения в условиях постоянно меняющейся поездной обстановки непрерывно рассчитывают оптимальное с точки зрения минимума расхода электроэнергии значение скорости в каждый момент времени и путем управления тяговой и тормозной системами локомотива обеспечивают её поддержание строго соблюдая расписание (для пассажирского движения) или перегонное время хода (для грузового движения и правила и нормы безопасности движения.
Дисплей системы автоведения информирует локомотивную бригаду о текущих параметрах движения: координата, скорость и время, профиль пути, сигнал локомотивного светофора, текущее и следующее ограничение скорости, ближайшие станции и путевые объекты, информация об исполнении расписания и другое [4,5]. При желании машинист может вывести на экран дополнительную информацию, например, давление в тормозной магистрали поезда, список всех ограничений скорости, значения токов, расстояния между остановочными пунктами и т. д.
Внешний вид человеко-машинного интерфейса системы автоведения, разработанной компанией «АВП-Технолгия» (г. Москва), показан на рис. 1. Ввод исходных данных, необходимых для работы системы (номер поезда, определяющий расписание движения, параметры состава масса, количество вагонов, их загруженность, параметры исполнения расписания) перед началом движения, а также изменения в настройках системы осуществляется через соответствующее меню с помощью клавиатуры, путем считывания их с картриджа или посредством передачи из центра управления перевозками с помощью радиоканала.
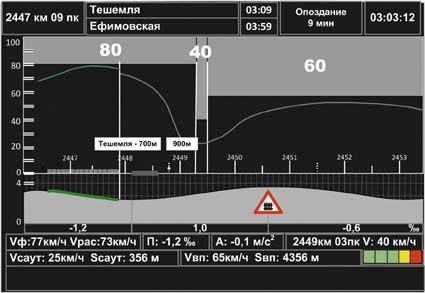
Рис.1 - Человеко-машинный интерфейс системы автоведения
Человеко-машинный интерфейс позволяет также задавать временные ограничения скорости и обеспечивает возможность оперативного вмешательства машиниста в управление в случае необходимости: переход в режим «советчик» или «ручное управление», выполнение экстренного торможения и т. д. Указанный интерфейс включает также систему индикации параметров движения и продольного профиля пути.
Проверка работы аппаратуры системы автоведения и локомотива также осуществляются через меню. Диагностика и самодиагностика аппаратуры проводится перед началом работы системы автоведения – предрейсовый контроль, а также в процессе движения и в условиях депо.
Структура программно-аппаратных средств бортовой системы автоведения представлена на рис. 2 [6].
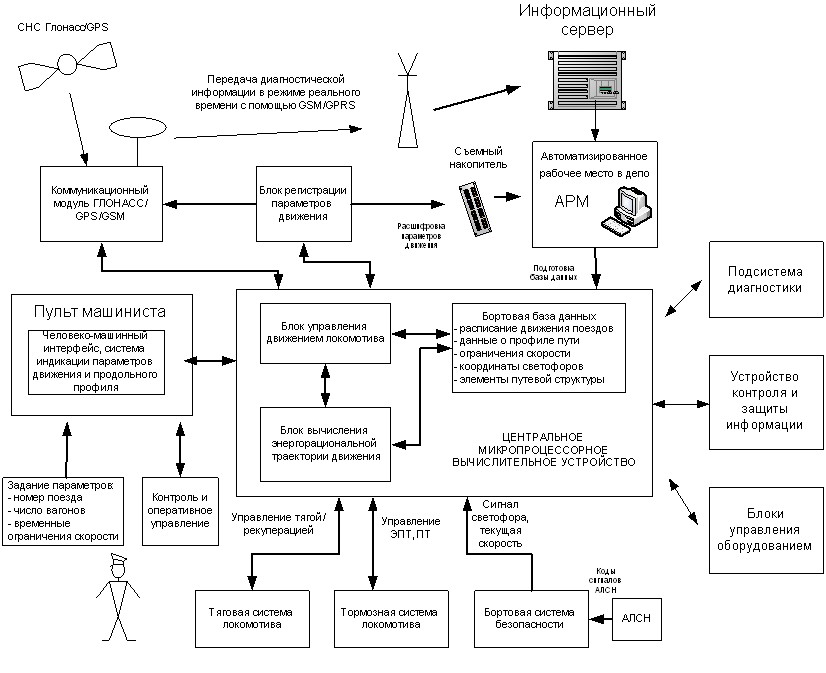
Существует два подхода к её построению: на базе существующей аппаратуры или путем установки дополнительных программно-аппаратных средств. Преимущества первого подхода заключаются в том, что функция автоведения реализуется путем установки только соответствующего программного обеспечения, однако это в большинстве случаев затруднено, поскольку большинство серийных локомотивов изначально проектировались без учета этой системы. Поэтому обычно требуется установка дополнительных аппаратных средств, что предполагает изменение электрической и пневматической схем локомотива.
Бортовая база данных формируется с помощью автоматизированного рабочего места (АРМ) в депо и содержит: расписание движения поездов, информацию о профиле пути на участке железной дороги (величины уклонов и кривых в зависимости от текущей координаты); информацию о постоянных ограничениях скорости на участке, а также расположение объектов путевой инфраструктуры (светофоров, нейтральных вставок контактного провода, станций, переездов, приборов обнаружения нагретых букс и др.). Для формирования такой базы данных может использоваться специализированный аппаратно-программный комплекс (АПК), структура которого представлена на рис. 3.
Рассмотрим более подробно отдельные компоненты АПК, представленного на этой схеме, состоящей из двух основных блоков, − информационного и программного обеспечения. Первый из них содержит базу данных об участке пути, включающую всю необходимую информацию.
Вторым элементом рассматриваемого блока является расписание на конкретном участке эксплуатации. Данные о локомотивах и вагонах необходимы для корректного моделирования механических и электромеханических процессов при различных режимах движения. К их числу относятся тяговые характеристики локомотивов или программные модели тягового привода, тип и параметры тормозного оборудования, масса, длина и число осей подвижного состава и другие.
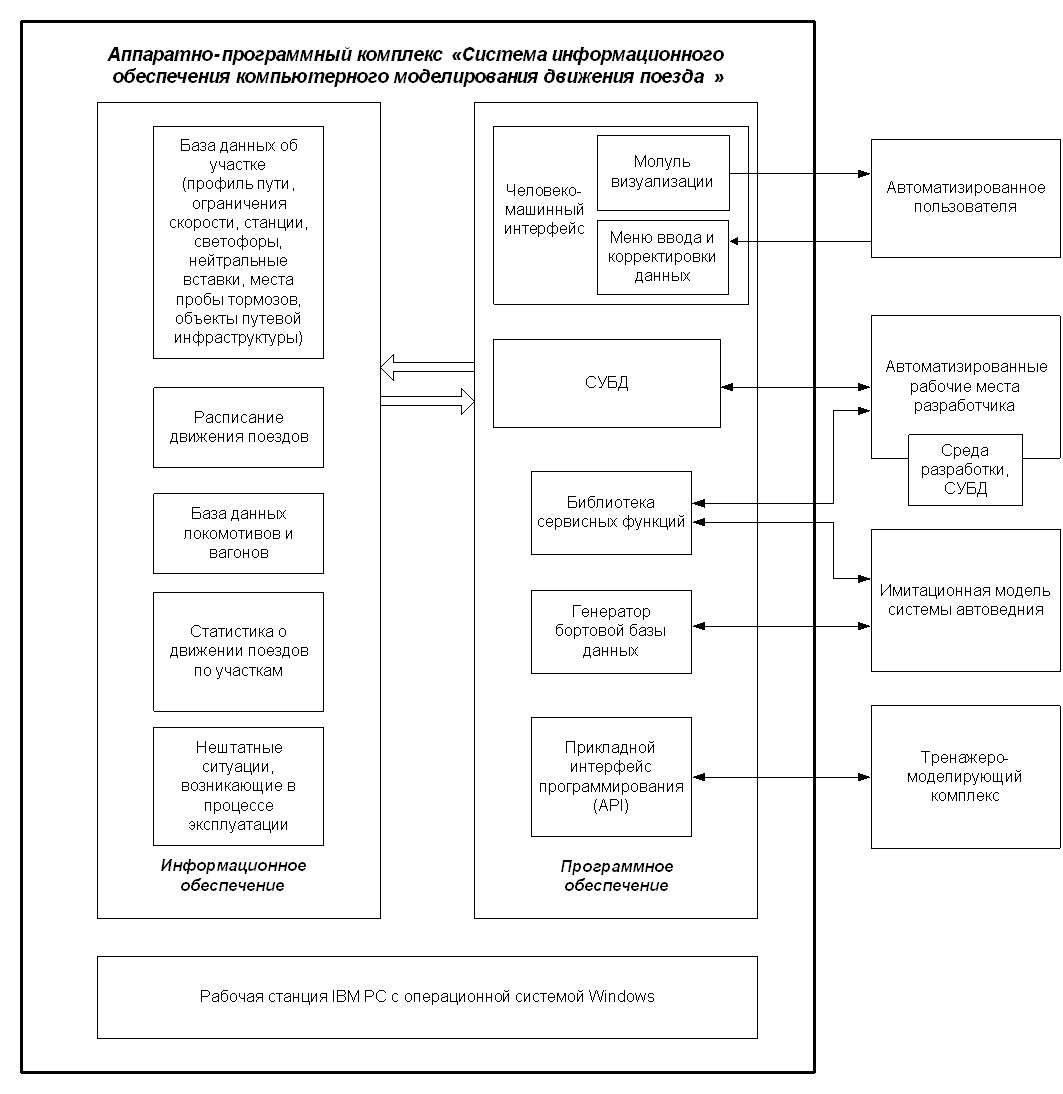 Рис. 3 - Структурная схема программно-информационного
Рис. 3 - Структурная схема программно-информационного
обеспечения компьютерного моделирования движения поезда
Важной функцией АПК является возможность накопления статистики о движении поездов по участкам, включая возникающие нештатные ситуации. Это позволит, анализируя соответствующие данные, выработать рекомендации по оптимальному и безопасному ведению поездов на соответствующих участках и возможным действиям локомотивных бригад в аварийных и нештатных условиях.
Второй блок содержит средства человеко-машинного интерфейса, имеющего модуль визуализации и меню для ввода и корректировки данных. С их помощью пользователь осуществляет ввод и редактирование соответствующей информации. Для развития и наращивания функций комплекса предусмотрены инструменты разработчиков программного обеспечения и системы управления базами данных (СУБД).
Библиотека сервисных функций предназначена для предварительной обработки исходных данных, например, для учёта длины поезда при формировании массива ограничений скорости, наложения основных и дополнительных ограничений скорости, определения координат начала торможения для поездов с различной массой и ряд других.
Генератор бортовой базы данных системы автоведения предназначен для формирования файлов, содержащих информацию по заданному участку эксплуатации и загружаемых в бортовую систему автоведения, имитационную модель или тренажер машиниста. С целью обеспечения программной стыковки АПК с тренажеро-моделирующими комплексами и имитационными моделями предусматривается прикладной интерфейс программирования (API).
Текущие параметры движения поезда фиксируются бортовым регистратором, информация из которого затем записывается на съёмный носитель или, при наличии соответствующей инфраструктуры, передается в режиме реального времени по радиоканалу, накапливается на информационном сервере и затем обрабатывается с помощью АРМа. На основе информации из бортовой базы данных блок вычисления энергорациональной траектории движения рассчитывает оптимальную программу ведения поезда по результатам упреждающего тягового расчёта. Далее с учётом анализа текущей поездной ситуации (коды автоматической локомотивной сигнализации АЛСН, информация от бортовой системы безопасности) блок управления движением формирует команды управления тяговой и тормозной системами, включая электропневматический (ЭПТ) и пневматический (ПТ) тормоз.
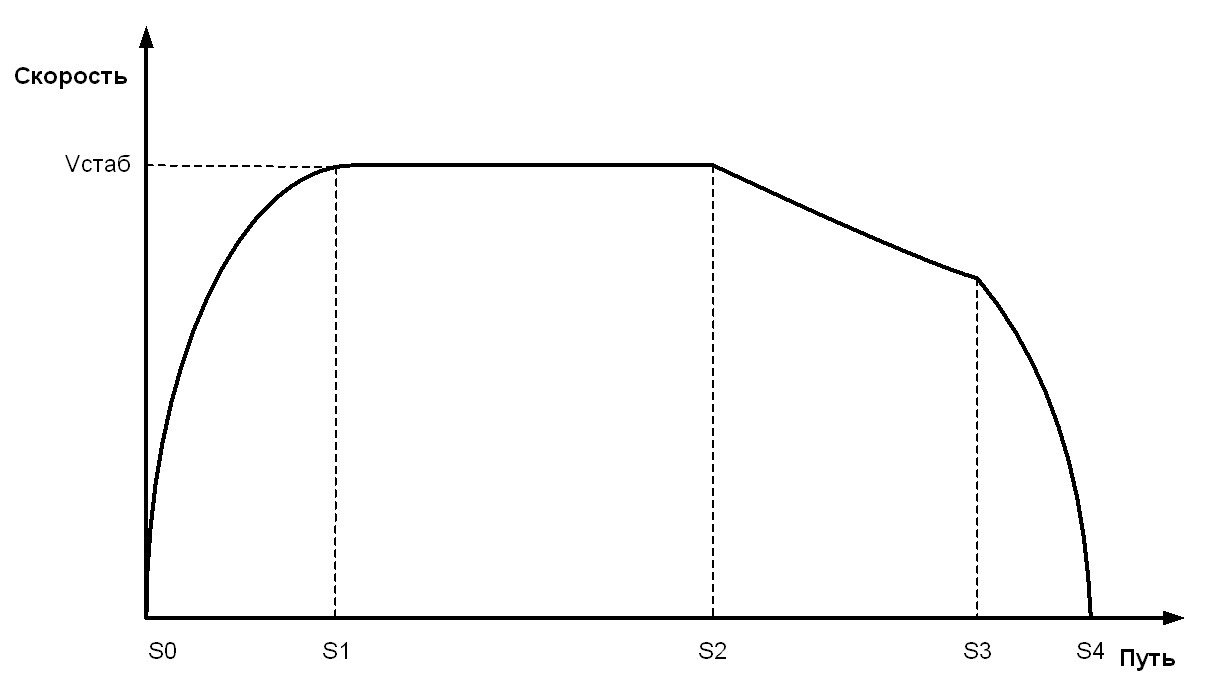
Одной из важных функций системы автоматизированного ведения поезда является управление тормозами. Данная функция включает в себя управление снижением скорости при подходе к ограничению скорости движении под ограничения скорости, автоматическую остановку на красный сигнал светофора, прицельную остановку на станции, а также специфические режимы замещения электрического торможения автоматическим (пневматическим) при срыве первого. Типовая траектория движения поезда представлена на рис. 4.
В основе функционирования систем автоведения лежит так называемый энергоопимальный тяговый расчёт. Критерием оптимизации является расход электроэнергии на тягу, а с целью упрощения математических выкладок за независимую переменную принимается путь и решается задача с фиксированным временем, а её формулировка основывается на системе уравнений и неравенств, в которые входят следующие параметры: скорость, путь и время хода; масса поезда; коэффициент инерции вращающихся частей; основное сопротивления движению и дополнительное от уклонов и кривизны пути; сила тяги, электрического и пневматического торможения, причем обычно рассматривается один из видов тормозов, но на некоторых локомотивах может быть реализован также режим совместного торможения электрическим тормозом локомотива и электропневматическим поезда, энергетический критерий – суммарный расход электроэнергии, расход энергии на тягу и возврат при рекуперации; коэффициент тягового привода в режиме тяги и рекуперации соответственно; начальная и конечная координата локомотива и его скорость в начале и конце пути, а также пути; скорость в начале и в конце пути; максимально допустимая скорость по условиям движения на участке; максимально возможные силы тяги и торможения при текущей скорости движения. Решая уравнение движения поезда определяют траекторию движения поезда.
Задача оптимального управления заключается в нахождении для объекта управления - поезда, описываемого дифференциальным уравнением с учётом начальных и конечных (граничных) условий, ограничений на фазовые координаты и на управляющие воздействия такого управления силами тяги и торможения, и соответствующие ему траектории, которые обеспечат заданное время хода по перегону с минимальным расходом электроэнергии.
Для решения сформулированной задачи могут использоваться различные методы [2]. Один из вариантов решения на основе метода динамического программирования приведен в [7]. В основе расчетной схемы лежат идеи динамического программирования и решение основного уравнения движения поезда. Структура схемы расчёта приведена на рис. 5.
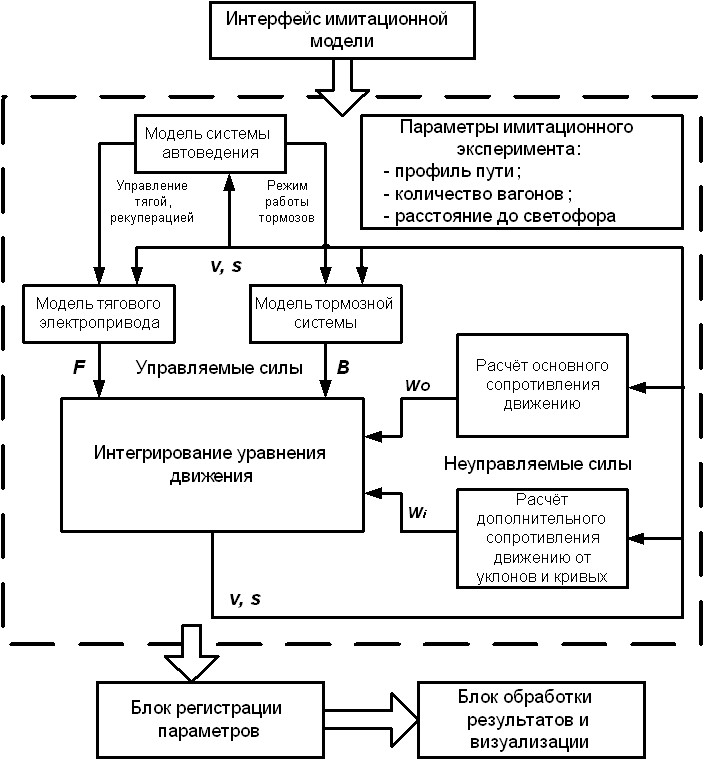
Пример рассчитанной полученной оптимальной траектории для локомотива с непрерывным регулированием силы тяги и рекуперативным торможением для поезда массой 990 тонн приведен на рис. 6.

При этом следует отметить, что рациональные режимы вождения должны быть основаны на понимании физики процессов, в частности особенностей преобразования энергии движущегося поезда, поскольку вождение поезда связано с выполнением механической работы по перемещению поезда по рельсам [8].
Основная часть энергоресурсов расходуется на выполнение механической работы по перемещению поезда. В тяговом режиме механическая работа затрачивается на преодоление сил сопротивления движению, изменение потенциальной и кинетической энергии. В тормозном режиме ранее накопленные кинетическая и потенциальная энергии движущего поезда преобразуется в тепловую в процессе механического и реостатного торможения и в электрическую при рекуперативном торможении, и, кроме того, энергия расходуется на преодоление значительно меньшей силы сопротивления движению.
Потенциальная энергия поезда определяется профилем пути. При движении поезда по подъему она увеличивается, по спуску – уменьшается. Если поезд движется по подъему ускоренно или с постоянной скоростью, потенциальная энергия увеличивается только за счёт механической работы локомотива, если же – замедленно, то ещё и за счёт уменьшения кинетической энергии. При движении по спуску возможен переход потенциальной энергии в кинетическую при ускоренном движении, либо в тепловую – при механическом или реостатном торможении и в электрическую – при рекуперативном.
Кинетическая энергия поезда пропорциональна квадрату скорости движения и его приведённой массе. На приобретение поездом требуемой кинетической энергии для поддержания заданной скорости и выполнение установленного графиком движения времени хода по перегону затрачивается значительная часть механической работы, выполняемой тяговым подвижным составом. Если поезд движется с ускорением на любых элементах профиля, его кинетическая энергия возрастает за счёт механической работы, совершаемой локомотивом, а при движении по спуску – ещё и за счёт перехода потенциальной энергии в кинетическую. В том случае, когда поезд движется замедленно, его кинетическая энергия расходуется на преодоление сил сопротивления движению; при движении по подъёму она частично может переходить в потенциальную. При механическом и электрическом торможениях часть накопленной кинетической энергии гасится.
Таким образом, механическая работа, совершаемая тяговым электроприводом локомотива на определенном участке пути, может быть представлена в виде суммы составляющих, затрачиваемых на: изменение потенциальной энергии поезда, преодоление сил сопротивления от кривых пути, преодоление сил основного сопротивления движению поезда, восполнение механической энергии, потерянной при регулировочных торможениях на вредных спусках, а также при торможении поезда, для снижения скорости и остановки. Рассмотренные соображения лежат в основе рационального ведения поезда [8].
К настоящему моменту создано несколько систем автоведния. Следует отметить прежде всего системы УСАВПП, УСАВПГ, ИСАВП-РТ компании АВП-Технология, систему ЕКС компании ОЦВ. Разработками систем автоведения занимаются также ВНИКТИ, НИИАС, ВНИИЖТ, НПО «САУТ» и другие. Опытные системы были созданы также .
В рамках создания интеллектуальной транспортной системы железнодорожного транспорта, создаваемой под руководством специалистов головного института РЖД – ОАО «НИИАС», внедрение которой определено таким директивными документами, как Стратегия развития железнодорожного транспорта в Российской Федерации на период до 2030 г. и Стратегические направления научно-технического развития до 2015 г. (Белая книга ), система «Автомашинист» является частью интеллектуальной системы управления движением поездов на основе спутниковых технологий ГЛОНАСС/GPS. Общая схема такой системы приведена на рис.7 [9].

Рис. 7. Общая схема интеллектуальной системы управления
движением поездов на направлении Санкт-Петербург - Москва
Использование и совершенствование системы автоведения и её использование в составе интеллектуальной системы управления движением поездов позволит достичь большой экономии электроэнергии, повысить безопасность движения, улучшить условия труда локомотивной бригады.
Литература
Никифоров управления торможением поездов / , , // М.: Транспорт, 1985. – 263 с. Микропроцессорные системы автоведения электроподвижного состава / , , , ; под ред. . – М.: Транспорт, 1990. – 272 с. Пясик, М. Системы автоматического ведения поезда / М. Пясик, Е. Толстов, И. Случак// СТА. - 2000. - №4. - С. 60-69. www.avpt. ru Донской, автоведения и регистрации для электровозов пассажирского движения / , // Железнодорожный транспорт. - № 9. - 2005. – С. 9-12. Юренко энергооптимальных режимов движения перспективного подвижного состава методом динамического программирования / Известия вузов. Электромеханика. №3. 2013. – С. 78-82. Юренко, -программный комплекс для моделирования и автоматизированного управления движением поезда / , // Изв. вузов. Сев.-Кавк. регион. Техн. науки. - 2012. № 2. - С. 26-31. Вождение поездов: Пособие машинисту / , , ; под. Ред. . – М. транспорт, 1994. – 304 с. Гапанович направления развития интеллектуального железнодорожного транспорта / , //Железнодорожный транспорт.-2011.-№4.-С.5-11.
