

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
, ,
Донской государственный технический университет
г. Ростов – на – Дону, Россия
КАЛИБРОВКА ЦИФРОВОГО MEMS-АКСЕЛЕРОМЕТРА МЕТОДОМ НАИМЕНЬШИХ КВАДРАТОВ
Аннотация. В статье рассмотрен алгоритм калибровки MEMS акселерометров методом наименьших квадратов в стохастической постановке задачи идентификации параметров. Результаты эксперимента с откалиброванными по рассмотренной методике MEMS датчиками ADXL345 фирмы Analog Devices показали, что полученные оценки ошибки идентификации параметров акселерометра составляют 1-2%.
Ключевые слова: калибровка; MEMS; акселерометр; идентификация параметров; метод наименьших квадратов.
Goryanina K. I., Katin O. I., Fedotov O. V.
Don State Technical University
Rostov – on – Don, Russia
CALIBRATION OF THE DIGITAL MEMS-ACCELEROMETER BY THE METHOD OF THE LATEST SQUARES
Abstract. The article considers the algorithm of calibration of triaxial MEMS accelerometers using the method of least squares in the stochastic statement of the problem of identification parameter. The results of an experiment with calibrated MEMS sensors ADXL345 from Analog Devices, which were calibrated according to the method examined, demonstrated that the obtained error estimates of accelerometer identification parameter are 1-2%.
Keywords: calibration; MEMS; accelerometer; parameters identification; least squares method.
Введение. Стремительное развитие технологии микроэлектромеханических систем привело к широкому применению в недорогих устройствах датчиков и систем измерения параметров, которые раньше использовались только в дорогой авиационной, космической и военной технике. В частности это относится к датчикам измерения параметров движения – инерциальным датчикам (акселерометрам, гироскопам). Благодаря сочетанию малых габаритов, низкого энергопотребления, универсальному применению и небольшой цене на сегодняшний день MEMS датчики заняли свою нишу в различных сферах применения [1, 2]. Использование акселерометров сопряжено с рядом трудностей, обусловленных конструкцией и особенностями датчика [3]. В связи с этим вопросы повышения точности и стабильности показаний приобретают первостепенное значение.
Анализ методов калибровки. Для сведения рассогласований показаний акселерометра к минимуму используют различные методы калибровки. В статье [4] рассмотрен алгоритм калибровки MEMS акселерометров с шестью фиксированными калибровочными положениями. Недостатком метода является необходимость задания известной угловой ориентации осей бесплатформенной инерциальной навигационной системы относительно осей локальной системы координат.
В работах [5, 6] представлен метод идентификации параметров акселерометра и коррекции показаний в процессе работы. Стохастическая постановка задачи идентификации параметров позволяет представлять реакцию акселерометра на ускорение свободного падения g в виде точки в трехмерном пространстве, а облако точек – в виде эллипсоида. С помощью метода наименьших квадратов был получен вектор оценок параметров.
Экспериментальная установка. Продолжением выше предложенного метода является разработка экспериментальной установки, представляющей собой две поворотные платформы, выполняющие вращение во взаимно перпендикулярных плоскостях, на одной из которых фиксируется MEMS акселерометр; преобразующая система данных на основе Arduino UNO R3 (рис. 1а).
а) |
Рис 1. а - внешний вид экспериментальной установки; б - визуализация экспериментальных данных откалиброванного датчика на фоне эллипсоида чувствительности |
 б)
б) 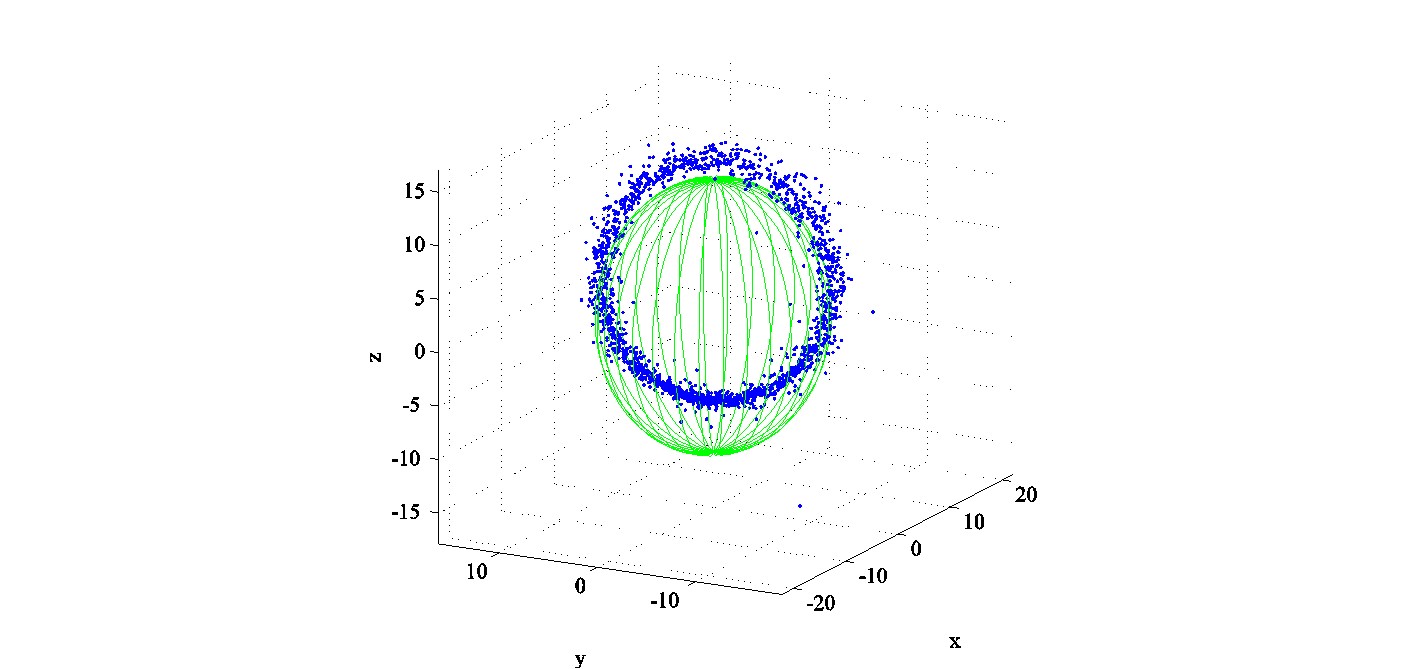
Результаты эксперимента представлены на рис. 1б. Полученные коэффициенты усиления по осям акселерометра позволяют компенсировать неединичный масштаб осей. Процедура центрирования данных дает возможность избавиться от постоянного смещения нуля. При этом оценка ошибки среднеквадратичного отклонения составляет 1-1,5% по каждой из осей акселерометра.
Благодарности. Работа выполнена в рамках инициативной НИР. Авторы выражают благодарность научному руководителю, к. т.н., доценту,
Литература
1. Васюков, исследование информационного сигнала комбинированного датчика удара, наклона и движения на основе 3-осевого MEMS-акселерометра/ , , // [Электронный ресурс]: Наука и образование. МГТУ им. . - Электрон. журн. -2014. -№ 10. - С. 209–229. - Режим доступа: �h�t�t�p�:�/�/�� �h�t�t�p�:�/�/�t�e�c�h�n�o�m�a�g�.�b�m�s�t�u�.�r�u�/�d�o�c�/�7�3�0�6�7�5�.�h�t�m�l��. –Дата обращения 05.11.2016.
2. Будкин, датчики для систем навигации и ориентации/ , , // Нано - и микросистемная техника. -2000. -№2. –С.8.
3. 3- Axis Digital Accelerometer ADXL 345. Analog Devices Inc., Data Sheet, Rev. 0, 2009.
4. Хлопов, цифровых трехосных MEMS акселерометров по шести ортогональным осям/ //Радиотехнические и телекоммуникационные системы. -2015. -№2(18). - С.61-65.
5. Лукьянов, параметров преобразующей системы MEMS - акселерометра ADXL-345 методом наименьших квадратов/ , , Д. Т. Фам// Электроника и электротехника. -2016. -№ 2. - С.171-179.
6. Goryanina, K. I. The identification of the mems accelerometerтmodel parameters/ K. I. Goryanina, A. D. Lukyanov// Modern informatization problems in economics and safety: Proceedings of the XXII-th International Open Science Conference. - Yelm, WA, USA: Science Book Publishing House -2017.–P. 137-141.
