


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Применение методов нечёткой логики для оценки режима работы двигателей при построении прототипа экспертной системы (язык CLIPS)
Введение:
Построение экспертной системы (ЭС) подразумевает использование машиной логического вывода лингвистических переменных, которые, в свою очередь, используются в теории нечётких множеств и могут принимать значения, описанные на естественном языке. В простейшем случае построения системы, данные переменные описываются законами обычной логики, т. е. любой факт, задаваемый или получаемый в процессе работы ЭС, определяется математическими соотношениями, которые могут быть переведены в булеву логику. Такой подход реализует классические экспертные системы. Главным отличием и преимуществом методов нечёткой логики является не обычная, «двоичная» логика, а наличие функции принадлежности, которая определяет степень принадлежности какого-либо объекта к нечёткому множеству, что позволяет производить «мягкие» вычисления (soft matching), а также более точно определять лингвистические переменные на пограничных значениях. Применение данных методов позволяет разрабатывать нечёткие ЭС (или экспертные системы с системой нечёткого вывода).
Несмотря на достаточно давнюю историю теории нечётких множеств, которая появилась в 60-е года XX века, а в 80-е получила широкое практическое развитие, в современных бортовых системах данная теория (как и механизм экспертных систем) практического применения не нашла. Многие авиационные эксперты и разработчики считают, что внедрение ЭС невозможно или сильно затруднено ограничениями вычислительной мощности бортовых цифровых вычислительных машин (БЦВМ), однако на данный момент идёт активное обсуждение возможности внедрения на борт таких систем (патент RU 2 517 422 C1 «Экспертная система контроля бортового оборудования летательных аппаратов» от 01.01.2001, полученный сотрудниками ЛИИ им. ).
Одним из важнейших элементов ЭС является база знаний (БЗ), которая содержит в себе набор правил (шаблонов), определяющих реакцию системы на появление в ней новых фактов. При построении ЭС, облегчающей интеллектуальную деятельность экипажа (или осуществляющей интеллектуальную поддержку), правила, находящиеся в БЗ, являются основой для построения типовых – особых ситуаций на борту, которые могут возникнуть по вине экипажа, что определяется т. н. человеческим фактором. Для оценки возможности применения методов нечёткой логики в такой ЭС взята типовая ситуация, в которой экипаж при выполнении взлёта не установил режим работы двигателей (РРД) в соответствии с расчётными значениями.
К примеру, одним из сопутствующих факторов, приведших к катастрофе самолёта Як-42 б/н RA-42434 в а/п Туношна в 2011 году, являлся фактически установленный режим работы двух двигателей из трёх ниже рекомендованного: обороты первого двигателя соответствовали минимально допустимым расчётным значениям (номинального режима работы двигателей) для фактических условий взлёта, а обороты второго и третьего двигателя были ниже на ~2% – отчёт о расследовании авиационного происшествия, МАК.
Постановка задачи: по исходным данным оценить методами нечёткой логики режим работы двигателей (РРД) по следующим критериям: взлётный (взл.), номинальный (ном.).
Исходные данные:
В условиях, когда получение реальных расшифровок средств объективного контроля сильно затруднено, для оценки возможности работы системы можно использовать данные, полученные в результате моделирования. Одной из самых адекватных и проработанных моделей на данный момент является модель самолёта Ту-154М для среды Microsoft Flight Simulator, разработанная командой «Проект Туполев» и сертифицированная как полноценный процедурный тренажёр. Параметры движения летательного аппарата, а также данные систем записываются моделью системы МСРП-64 в цифровом виде, аналогично реальной системе.
Для проверки реакции ЭС на типовую ситуацию «Неправильно установлен РРД на взлёте», был использован график опробования двигателей, рекомендованный руководством по лётной эксплуатации (РЛЭ) самолёта Ту-154М, т. к. он хорошо подходит для определения режимов работы двигателей системой с нечёткой логикой. Циклограмма полного опробования двигателей показана на рис. 1:Исходя из данного графика, выбираются лингвистические переменные, соответствующие РРД: номинальный режим работы двигателей (ном.) и взлётный режим работы двигателей (взл.). Кроме того, задаются лингвистические переменные «0.6 ном», «0.7 ном», «МГ (малый газ)», «посадочный МГ». Функции принадлежности для данных лингвистических переменных будут выведены далее.
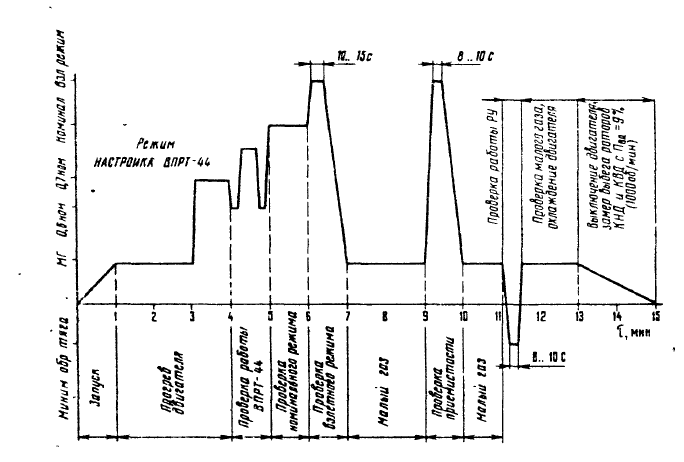
Рис. 1. График полного опробования двигателей
В результате проведения эксперимента с использованием вышеуказанной модели был получен исходный файл модели МСРП-64 (Таблица 1), по данным которого был построен следующий график опробования двигателей (зависимость оборотов КВД, % от времени), показанный на рис. 2.
#el_time | time | eng1_n1 | eng1_n2 |
#(sek) | HH:MM:SS | (%) | (%) |
99.94438 | 17:51:30 | 35.3 | 65.1 |
102.9444 | 17:51:33 | 49.5 | 76.3 |
105.9444 | 17:51:36 | 56.2 | 80.6 |
108.9444 | 17:51:39 | 60.7 | 82.8 |
111.9444 | 17:51:42 | 65.2 | 84.9 |
114.9444 | 17:51:45 | 71.3 | 87.7 |
117.9444 | 17:51:48 | 60.6 | 82.6 |
120.9444 | 17:51:51 | 55.4 | 80.2 |
123.9444 | 17:51:54 | 67 | 85.9 |
126.9444 | 17:51:57 | 76.5 | 90.6 |
129.9444 | 17:52:00 | 78.4 | 91.6 |
132.9444 | 17:52:03 | 78.6 | 91.7 |
135.9444 | 17:52:06 | 76.9 | 90.5 |
138.9444 | 17:52:09 | 58.2 | 81.5 |
141.9444 | 17:52:12 | 65.5 | 85.2 |
144.9444 | 17:52:15 | 77.5 | 91.2 |
147.9444 | 17:52:18 | 80.1 | 92.6 |
150.9444 | 17:52:21 | 80.3 | 92.7 |
153.9444 | 17:52:24 | 80.5 | 92.7 |
156.9444 | 17:52:27 | 69.6 | 86.6 |
159.9443 | 17:52:30 | 55.2 | 79.8 |
162.9443 | 17:52:33 | 63.1 | 84.2 |
165.9443 | 17:52:36 | 81 | 93.2 |
168.9443 | 17:52:39 | 86.8 | 95.5 |
171.9443 | 17:52:42 | 88.2 | 96.1 |
174.9443 | 17:52:45 | 88.6 | 96.2 |
177.9443 | 17:52:48 | 88.6 | 96.3 |
181.111 | 17:52:51 | 73 | 88 |
199.111 | 17:53:09 | 47.7 | 75.6 |
202.111 | 17:53:12 | 70.6 | 87.9 |
205.111 | 17:53:15 | 83.5 | 94.3 |
208.111 | 17:53:18 | 87.4 | 95.8 |
237.9443 | 17:53:47 | 77.1 | 90.4 |
Таблица 1*. Данные, полученные в результате моделирования
* столбцы: внутреннее время, время UTC, обороты КНД и КВД.

Рис.2. График опробования двигателя (моделирование)
Реализация экспертной системы и правил для базы знаний.
1. Определение функций принадлежности для каждой из лингвистических переменных.
Функция принадлежности для лингвистической переменной (ЛП) выбирается на основании мнения эксперта (или нескольких экспертов), которое должно быть смоделировано непосредственно в экспертной системе. Режимы работы двигателей для каждого ЛА определяются в зависимости от типа двигателей, установленных на ЛА. Так, расчёт РРД, потребного для выполнения взлёта может быть установлен жёстко, а может быть произведён в зависимости от внешних условий. Для проверки принципиальной возможности работы систем данные для определения РРД самолёта Ту-154М берутся из РЛЭ, эти данные приведены в Таблице 2. При построении реальной экспертной системы данные для расчёта РРД уточняются по специальным методикам.
Режим работы | Частота вращения роторов, % | Средняя температура газа за турбиной, °С | |
КНД | КВД | ||
Взлётный Номинальный 0.9 номинального 0.7 номинального 0.6 номинального 0.42 номинального (пос. МГ) Малый газ (МГ) | 85.5 ... 88.0 82.0 ...85.0 78.5 ...81.5 71.0 ...74.0 67.0 ...70.0 57.5 ...60.5 30 | 94.5 ...96.0 93.0 ...95.0 91.0 ...92.8 87.5 ...90.0 85.5 ...88.0 81 ...83.5 59.5 ...61.5 | 595 не более 585 не более 545 505 485 445 465 |
Таблица 2. Наземные режимы работы (при Pн=760, tн=15°C, Мп=0).
Можно заметить, что ЛП «взлётный режим» определяется интервалом n1 = 94.5 … 96.0%, ЛП «номинальный режим» – интервалом 93.5 … 95.0, т. е. при использовании обычной, двоичной логики, РРД, соответствующий n1=95.0% чётко определён быть не может: он попадает как под значение «номинальный РРД», так и «взлётный РРД».
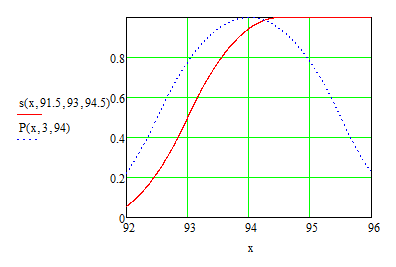
В нечёткой логике одной из распространённых функций, использующихся при описании функции принадлежности, является S-функция, которая позволяет не использовать табличные способы задания ЛП и задаётся соотношением (1). Параметры ![]() определяют нулевое значение функции, точку пересечения 0.5 и единичное значение, соответственно.
определяют нулевое значение функции, точку пересечения 0.5 и единичное значение, соответственно.
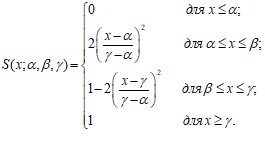 (1)
(1)
Для ЛП «Взлётный режим» функция принадлежности определяется через S-функцию, а график её показан на рис. 3.
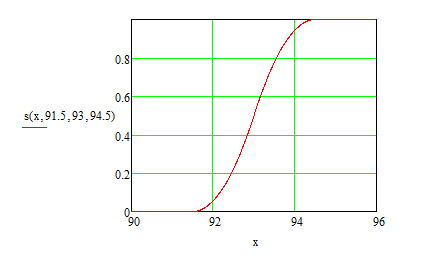
Рис. 3. Функция принадлежности для ЛП «Взлётный РРД»
Функция обращается в 0 при режиме 91.5%, степень принадлежности больше 0.5 определяется режимами более 93%, а 1 функция возвращает при режимах более 94.5% (согласно Таблице 2).
Зачастую при описании ЛП имеется необходимость задать некоторый интервал значений, допустимых для использования, т. е. описывающих степень принадлежности ЛП к множеству большую или равную 0.5. В таких случаях используется П-функция. Данная функция определяется соотношением (2). Параметр ![]() определяет ширину интервала, а
определяет ширину интервала, а ![]() – пик функции.
– пик функции.
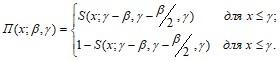 (2)
(2)
Для ЛП «Номинальный режим» и «Малый газ функции принадлежности определяется через П-функции. Графики функций принадлежности для вышеуказанных переменных показаны на Рис. 4 и Рис. 5 соответственно. Параметры для определения ширины интервала ![]() выбраны, исходя из данных Таблицы 2.
выбраны, исходя из данных Таблицы 2.
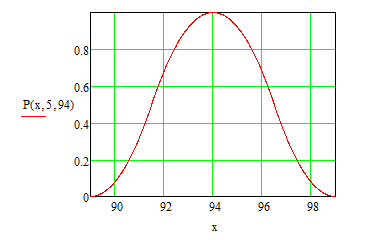
Рис. 4. Функция принадлежности ЛП «Номинальный режим»
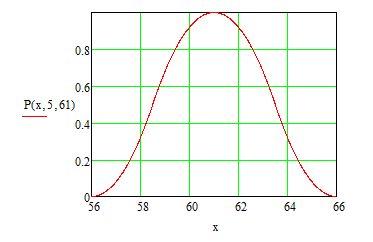
Рис.5. Функция принадлежности ЛП «Малый газ»
Таким же образом описываются переменные «0.9 номинального», «0.7 номинального», «0.6 номинального», «посадочный малый газ» и «Малый газ». В конечном итоге множеством термов ЛП «Режим работы двигателей» являются все вышеописанные ЛП. Лингвистическая переменная «Режим работы двигателей» и её значения показана на рис. 6.
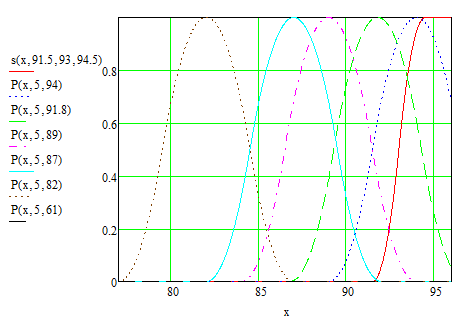
Рис. 6. Лингвистическая переменная «РРД» и её значения
Описание полученных результатов.
В качестве результатов работы экспертной системы получен файл, в который были записаны все сообщения ЭС, а также параметры, которые соответствовали получению данных рекомендаций. Общее время выполнения программы составило 0.153 сек. После анализа сообщений, выданных ЭС и нанесения их на график, получена циклограмма, показанная на рис. 3.

Рис. 3. Результаты работы системы.
