
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Практическое занятие 16
Тема «Параметрический синтез САУ»
16.1 Расчет настроек регулятора по частотному показателю колебательности (методом )
Расчет настроек регулятора по заданному частотному показателю колебательности замкнутой системы М, связанному однозначно со степенью затухания ![]() , выполняется в следующем порядке (см. рис. 16.1 и лекцию 18):
, выполняется в следующем порядке (см. рис. 16.1 и лекцию 18):
При этом первоначально коэффициент усиления регулятора принимаем равным единице ![]() . В результате частотная передаточная функция регулятора в общем виде может быть представлена как
. В результате частотная передаточная функция регулятора в общем виде может быть представлена как ![]() , где
, где ![]() ‑ частотная передаточная функция регулятора при
‑ частотная передаточная функция регулятора при ![]() , а частотная передаточная функция разомкнутой системы соответственно
, а частотная передаточная функция разомкнутой системы соответственно
![]() . (П16-1)
. (П16-1)
Построение АФЧХ выполняем в существенном для реализации оследующих построений диапазоне частот, при которых график находится в третьем квадранте.
Как видно из рисунка 16.1, задача синтеза сводится к выяснению вопроса: во сколько раз необходимо изменить (на иллюстрации – уменьшить) коэффициент усиления разомкнутой системы (а фактически регулятора), чтобы обеспечить перемещение АФЧХ в положение, при котором замкнутая система будет иметь требуемый запас устойчивости или, точнее, показатель колебательности М.
Для регуляторов с двумя настройками (ПИ-, ПД-регулятор) необходимо построить семейство АФЧХ для различных фиксированных значений второй настройки и найти предельный коэффициент усиления для каждого случая отдельно.
Из начала координат проводим прямую ОЕ (рис. 16.1) под углом, определяемым выражением![]() . (П16-2)
. (П16-2)
![]() . (П16-3)
. (П16-3)
Задача. Передаточная функция объекта управления (из предыдущей задачи)
![]() . (П16-4)
. (П16-4)
Рассчитать оптимальные настройки П - и ПИ-регулятора, обеспечивающие показатель колебательности системы не ниже 1.61 (М ≤ 1.61), что примерно соответствует степени затухания 0.9.
Решение.
Решение задачи удобно выполнять с использованием математического пакета MathCad.
П – регулятор.
![]() ‑ определяем мнимую единицу.
‑ определяем мнимую единицу.
![]() ‑ задаем исходные данные: степень колебательности М и параметры передаточной функции объекта управления.
‑ задаем исходные данные: степень колебательности М и параметры передаточной функции объекта управления.
![]() ‑ формируем частотную передаточную функцию объекта управления путем выполнения замены
‑ формируем частотную передаточную функцию объекта управления путем выполнения замены ![]() .
.
![]() ‑ формируем частотную передаточную функцию разомкнутой системы как последовательное соединение объекта
‑ формируем частотную передаточную функцию разомкнутой системы как последовательное соединение объекта ![]() и П-регулятора с передаточной функцией k1. Коэффициент усиления k1 используем как параметр функции
и П-регулятора с передаточной функцией k1. Коэффициент усиления k1 используем как параметр функции ![]() для удобства построения АФЧХ.
для удобства построения АФЧХ.
 ‑ получаем функциональные зависимости для вещественной и мнимой частей АФЧХ разомкнутой системы при коэффициенте усиления регулятора равном единице.
‑ получаем функциональные зависимости для вещественной и мнимой частей АФЧХ разомкнутой системы при коэффициенте усиления регулятора равном единице.
 ‑ формируем функциональную зависимость, описывающую линию ОЕ (рис. 16.1) в зависимости от значения показателя колебательности М.
‑ формируем функциональную зависимость, описывающую линию ОЕ (рис. 16.1) в зависимости от значения показателя колебательности М.
 ‑ формируем выражения для определения радиуса окружности запретной области и положения ее центра как функцию показателя колебательности М.
‑ формируем выражения для определения радиуса окружности запретной области и положения ее центра как функцию показателя колебательности М.
 ‑ формируем уравнение окружности запретной области в прямоугольной системе координат (параметрическое уравнение окружности как функция угла поворота
‑ формируем уравнение окружности запретной области в прямоугольной системе координат (параметрическое уравнение окружности как функция угла поворота ![]() ).
).
![]() ‑ задаем диапазон частот и шаг изменения для построения АФЧХ с целью отображения той ее части, которая находится в третьем квадранте.
‑ задаем диапазон частот и шаг изменения для построения АФЧХ с целью отображения той ее части, которая находится в третьем квадранте.
![]() ‑ вводим дополнительные параметры, позволяющие оперативно изменять параметры окружности запретной области с целью получения одновременного соприкосновения ее с АФЧХ лучом ОЕ.
‑ вводим дополнительные параметры, позволяющие оперативно изменять параметры окружности запретной области с целью получения одновременного соприкосновения ее с АФЧХ лучом ОЕ.
![]() Определение предельного коэффициента усиления П-регулятора в соответствии с формулой (П16.3)
Определение предельного коэффициента усиления П-регулятора в соответствии с формулой (П16.3)
В соответствии с методикой, изложенной в материале практического занятия 15, получаем выражения для построения переходной характеристики замкнутой системы с учетом найденного значения коэффициента усиления регулятора k1 (обратите внимание, что функции здесь сформированы в общем виде!):
Так как замкнутая система будет статической, то для нахождения установившегося значения используем возможности математического пакета для определения предельного перехода
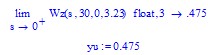 ‑ установившееся значение переходной характеристики.
‑ установившееся значение переходной характеристики.
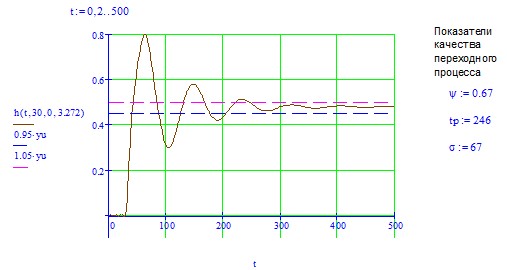
Для определения показателей качества переходного процесса использовались возможности трассировщика MathCad.
ПИ-регулятор.
Особенность расчета для ПИ-регулятора состоит в необходимости выполнения вычислений, аналогичных приведенным для П-регулятора для различных фиксированных значений второго параметра настройки, в данном случае – времени изодрома ![]() . Соответственно в программе необходимо модифицировать выражения для определения АФЧХ разомкнутой системы
. Соответственно в программе необходимо модифицировать выражения для определения АФЧХ разомкнутой системы
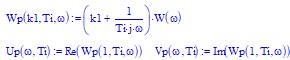
Коэффициент передачи ПИ-регулятора, как и в предыдущем случае, устанавливаем при построении АФЧХ равным единице. Результаты построений показаны на рис. 16.2.
Величины предельного коэффициента усиления ПИ-регулятора определяем в соответствии с формулой (П16.3) для каждого значения ![]() . Полученные пары настроек сводим в таблицу, которая в MathCad выражается в виде матрицы Data. По результатам строим график зависимости k1(
. Полученные пары настроек сводим в таблицу, которая в MathCad выражается в виде матрицы Data. По результатам строим график зависимости k1(![]() ), представленный на рис. 16.3.
), представленный на рис. 16.3.
![]() ‑ вектор данных времени изодрома
‑ вектор данных времени изодрома ![]() ;
;
![]() ‑ вектор данных предельного коэффициента передачи ПИ-регулятора.
‑ вектор данных предельного коэффициента передачи ПИ-регулятора.
Характер зависимости не дает возможности определить максимальное соотношение ![]() , которое на всем протяжении графика остается постоянным. Для выяснения того, какая же пара настроек дает наилучшие показатели качества, построим графики переходных характеристик для нескольких значений и проследим тенденцию. Результаты представлены на рис. 16.4.
, которое на всем протяжении графика остается постоянным. Для выяснения того, какая же пара настроек дает наилучшие показатели качества, построим графики переходных характеристик для нескольких значений и проследим тенденцию. Результаты представлены на рис. 16.4.
16.2 Особенности расчета настроек систем с ПИД-регулятором
Общая схема расчетов оптимальных параметров ПИД-регулятора в принципе ничем не отличается от расчета параметров ПИ-регулятора. Однако объем расчетов увеличивается, так как имеется не два, а три варьируемых параметра настройки.
Частотная характеристика разомкнутой системы с ПИД-регулятором при его единичном коэффициенте передачи определяется выражением
![]() , (П16-5)
, (П16-5)
где ![]() .
.
Построение этой характеристики при фиксированном ![]() производится аналогично, как и для ПИ-регулятора. В результате получают ряд границ областей заданного запаса устойчивости в плоскости параметров
производится аналогично, как и для ПИ-регулятора. В результате получают ряд границ областей заданного запаса устойчивости в плоскости параметров ![]() и
и ![]() . Для каждой из областей ищутся точки, соответствующие, например, минимуму среднеквадратичного отклонения, и уже среди них определяются оптимальные настройки.
. Для каждой из областей ищутся точки, соответствующие, например, минимуму среднеквадратичного отклонения, и уже среди них определяются оптимальные настройки.
16.3 Замечания по использования в качестве критерия показателя колебательности
Применение формулы для определения степени затухания (см. лекцию 11, формула 7-11) переходного процесса непосредственно по графику следует с большой осторожностью, если система описывается дифференциальным уравнением выше второго порядка (в таких системах не сохраняется постоянным период колебаний). Тем не менее, как показывает опыт расчетов, с практической точки зрения системы с одинаковыми показателями колебательности имеют в целом сходные по затуханию переходные процессы (см. рис. 16.4), даже если эти системы описываются совершенно разными дифференциальными уравнениями.
Для иллюстрации этого факта рассмотрим две САУ с одним и тем же И-регулятором, но с принципиально различными объектами управления. Первый объект представляет собой апериодическое звено первого порядка ![]() , а второй – звено чистого транспортного запаздывания
, а второй – звено чистого транспортного запаздывания ![]() , переходные характеристики которых показаны на рис. 16.5. Как можно заметить, свойства объектов существенно рознятся. Однако они выбраны такими, что при использовании одного и того же И-регулятора
, переходные характеристики которых показаны на рис. 16.5. Как можно заметить, свойства объектов существенно рознятся. Однако они выбраны такими, что при использовании одного и того же И-регулятора ![]() АФЧХ обеих систем в разомкнутом состоянии касаются одной и той же окружности запретной области для
АФЧХ обеих систем в разомкнутом состоянии касаются одной и той же окружности запретной области для ![]() (см. рис. 16.6) при одной и той же резонансной частоте
(см. рис. 16.6) при одной и той же резонансной частоте ![]() . Этого оказалось достаточно для того, чтобы на этой частоте совпали их амплитудно-частотные характеристики и оказались близкими по затуханию переходные характеристики (см. рис. 16.7).
. Этого оказалось достаточно для того, чтобы на этой частоте совпали их амплитудно-частотные характеристики и оказались близкими по затуханию переходные характеристики (см. рис. 16.7).
Этот пример иллюстрирует утверждение о том, что при выборе (аппроксимации) математической модели объекта необходимо учитывать, какой регулятор предполагается использовать для управления этим объектом, т. е. учитывать близость характеристик всей системы управления в целом, а не отдельно взятого объекта и его модели. Если характеристики объектов рассматривать в отрыве от системы управления, то предположение о том, что переходная характеристика системы со звеном чистого запаздывания наилучшим образом отражает (аппроксимирует) характеристику системы с апериодическим звеном первого порядка может показаться абсурдным.
