

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.391
РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ ОПТИМАЛЬНОГО РЕГУЛЯТОРА С ТРАЕКТОРНЫМ УПРАВЛЕНИЕМ ПО ЛИНЕЙНОЙ ОШИБКЕ НАВЕДЕНИЯ
© 2011 г.
В данной работе рассмотрены разработка структурной схемы оптимального регулятора с траекторным управлением по линейной ошибке наведения.
Ключевые слова: оптимальный регулятор, линейная ошибка.
Создание в последние годы ряда новых СВН, обладающих высоким тяговооружением и улучшенными аэродинамическими характеристиками, привело к тому, что класс маневров заметно расширился как по типам, так и по интервалам изменения параметров. Этому способствовало:
уменьшение постоянной времени контура стабилизации летательных аппаратов до 0.2-0.5 с;
способность совершать неустановившееся вращение по крену с угловой скоростью до 2-3 рад/с;
способность совершать без потери скорости маневр с перегрузками 8-10 единиц.
В настоящее время приняла значительную актуальность проблема перевооружения армии. Однако, современное состояние экономики России не позволяет провести полную замену устаревших образцов вооружения на новые, поэтому программа строительства Вооруженных Сил Российской Федерации на период с 2000 –2010 гг. предусматривает глубокую модернизацию техники, стоящей на вооружении.
Анализ тенденций развития науки и техники позволяет утверждать, что задача разносторонней модернизации средств вооруженной борьбы актуальна для образцов вооружения и военной техники, находящихся на вооружении соединений и частей войсковой ПВО в течении 10 –15 лет. К таким комплексам относится зенитный пушечно-ракетный комплекс «Тунгуска».
Целью работы является разработка оптимального регулятора траекторного управления ЗУР с целью повышения точности перехвата маневрирующих целей.
Рассмотрим уравнение, описывающее кинематику наведения ракеты
![]()
![]()
![]() , (1)
, (1)
геометрическая интерпретация представлена на рисунке 1.
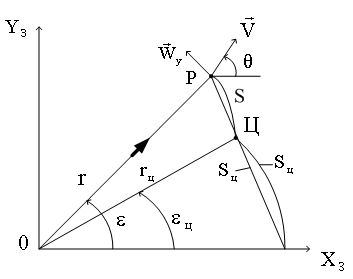
Рисунок 1 - Геометрия кинематики движения ракеты
На рисунке 1.2: ![]() и
и ![]() - криволинейные координаты цели и ракеты. Линейной мерой отклонения ракеты от цели является величина
- криволинейные координаты цели и ракеты. Линейной мерой отклонения ракеты от цели является величина ![]() . Учитывая малость разницы углов
. Учитывая малость разницы углов ![]() , величину h можно выразить как
, величину h можно выразить как ![]() .
.
В выражении (1) ![]() является трансверсальным ускорением ракеты – проекцией нормального ускорения
является трансверсальным ускорением ракеты – проекцией нормального ускорения ![]() на линию визирования ракеты. При
на линию визирования ракеты. При ![]()
![]() является составляющей нормального ускорения ракеты управляющей отклонением h. Продифференцировав дважды выражение
является составляющей нормального ускорения ракеты управляющей отклонением h. Продифференцировав дважды выражение ![]() , можно получить
, можно получить
![]() . (2)
. (2)
Предполагая V = const и ![]() , а также эволюцию движения ракеты случайным процессом типа белого шума
, а также эволюцию движения ракеты случайным процессом типа белого шума ![]() с известной односторонней спектральной плотностью
с известной односторонней спектральной плотностью ![]() , можно представить модели фильтрами Калмана [2]:
, можно представить модели фильтрами Калмана [2]:
объекта управления как
![]() , (3)
, (3)
и наблюдения
![]() , (4)
, (4)
где ![]() - центрированный белый шум измерений с известной односторонней спектральной плотностью
- центрированный белый шум измерений с известной односторонней спектральной плотностью![]() .
.
Полагая х1 = h, x2 = h, модель объекта для случая, когда управление считается известным u = -![]() , имеет вид
, имеет вид
![]() ,
, ![]() ;
;
![]() ,
, ![]() ; (5)
; (5)
![]() .
.
Алгоритм оценивания для модели (3) представляется как:
![]()
![]() ;
;
![]()
![]() , (6)
, (6)
где ![]() и Кф2 коэффициенты усиления невязок, равные
и Кф2 коэффициенты усиления невязок, равные
 ;
;  . (7)
. (7)
Дисперсии ошибок оценивания (фильтрации) определяются путем решения уравнений Рикатти:
 ;
; ![]() ;
;
 ;
; ![]() ;
;
 ;
; ![]() . (8)
. (8)
В предположении постоянства значений спектральных плотностей ![]() и Gh можно определить установившиеся значения D11 D12 и D22 путем решения алгебраических уравнений:
и Gh можно определить установившиеся значения D11 D12 и D22 путем решения алгебраических уравнений:
 ;
;
 ;
;
 . (7)
. (7)
В результате имеем выражения для дисперсий в виде:
![]() ;
;
![]() ;
;
![]() . (9)
. (9)
Тогда
 ;
;
 . (10)
. (10)
Решение задачи оптимального управления по квадратичному критерию (1.2) для системы (1.5) имеет вид двумерного фильтра [4]:
![]() ; (11)
; (11)
![]() ,
,
где ![]() ,
, ![]()
и закона управления в виде
![]() , (12)
, (12)
где ![]() и
и ![]() имеют смысл полосы пропускания координатора цели и контура наведения.
имеют смысл полосы пропускания координатора цели и контура наведения.
Для двухмерного фильтра при известном управлении и постоянные коэффициенты фильтра соответствуют постоянным интенсивностям шумов объекта и измерений.
Структура системы траекторного управления, реализующего закон управления (1.24) представлена на рисунке 2.
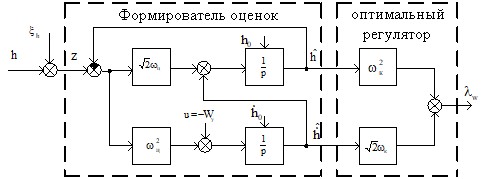
Рисунок 2 - Структурная схема оптимального регулятора для модели второго порядка
Для уменьшения динамической ошибки можно использовать команды компенсации по первой и второй производной от h:
![]() ; (13)
; (13)
![]() ,
,
где
 ;
;

 . (14)
. (14)
Выбор ![]() можно проводить из условия выполнения требований по точности наведения.
можно проводить из условия выполнения требований по точности наведения.
Структурная схема оптимального регулятора с компенсацией динамической ошибки наведения приведена на рисунке 1.4.

Рисунок 3 - Структурная схема оптимального регулятора с компенсацией
динамической ошибки
Более высокой точности наведения, особенно на интенсивно маневрирующие цели, можно достигнуть при увеличении порядка модели до третьего. Это объясняется тем, что более высокие производные лучше аппроксимируются некоррелированным шумовым процессом [4]. Кроме того, повышение порядка модели дает возможность получить оптимальные оценки вторых производных параметра управления (ошибок наведения).
В качестве исходной модели воспользуемся выражениями (1.14), (1.15).
Полагая х1 = h, x2 = ![]() , x3 =
, x3 = ![]() , модель объекта для случая, когда управление считается известным
, модель объекта для случая, когда управление считается известным ![]() , имеет вид:
, имеет вид:
![]() ;
;
![]() ,
,
где
![]() ;
; ![]() ;
;
 ;
;  ;
;  .
.
Алгоритм оценивания:
![]() ;
;
![]() ; (15)
; (15)
![]() ;
;
 ;
;  ;
;  ; (16)
; (16)
 ;
; ![]() ;
;
 ;
; ![]() ;
;
 ;
; ![]() ;
;
 ;
; ![]() ;
;
 ;
; ![]() ;
;
 ;
; ![]() . (17)
. (17)
Структурная схема трехмерного оптимального фильтра (1.27) представлена на рисунке 1.5.
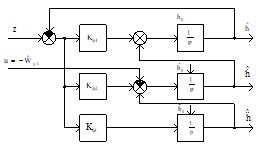
Рисунок 4 - Структурная схема трехмерного оптимального фильтра.
Трехмерный фильтр дает оптимальные оценки параметра управления h и его производных ![]() ,
, ![]() , использование которых позволяет формировать траекторное управление, обеспечивающее возможность реализовать наведение на интенсивно маневрирующие цели.
, использование которых позволяет формировать траекторное управление, обеспечивающее возможность реализовать наведение на интенсивно маневрирующие цели.
В случае предположения о случайном процессе движения цели, описываемом моделью Зингера к уравнению модели (2.14) необходимо добавить уравнение формирующего фильтра
![]() ,
, ![]() , (18)
, (18)
где ![]() - центрированный белый шум с известной односторонней спектральной плотностью
- центрированный белый шум с известной односторонней спектральной плотностью ![]() .
.
При этом обобщенный вектор состояния x, вектор наблюдения z и матрица A принимают вид:
![]() ,
, ![]() ,
, 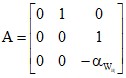 .
.
С учетом этих изменений алгоритм оценивания приобретает вид:
![]() ;
;
![]() ; (19)
; (19)
![]() ,
,
где Кф1, Кф2, Кф3 определяются согласно выражениям (1.28); дисперсии ошибок оценивания D11 – D32 - согласно выражениям (1.29); D33 определяется решением уравнения Рикатти
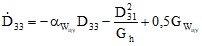 .
.
Структурная схема оптимального трехмерного фильтра (1.31) представлена на рисунке 1.6.
В отличие от оптимального фильтра (рисунок 1.5) данный фильтр позволяет получать оценку ![]() .
.
Для установившегося режима ![]() ,
, ![]() ,
, ![]() .
.
Структурная схема оптимального регулятора для модели третьего порядка приведена на рисунке 1.7.
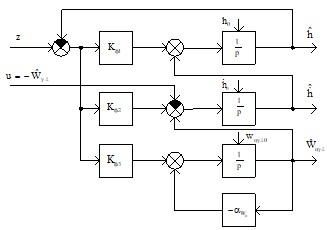
Рисунок 5 - Структурная схема трехмерного оптимального фильтра
с оцениванием ![]()
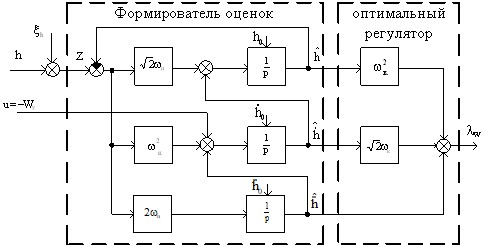
Рисунок 6 - Структурная схема оптимального регулятора для модели
объекта третьего порядка
WORKING OUT OF THE BLOCK DIAGRAM OF THE OPTIMUM REGULATOR WITH trajectories
MANAGEMENT BY THE LINEAR ERROR OF PROMPTING
Berks P. P.
In the given work working out of the block diagram of an optimum regulator with trajectories management by a linear error of prompting is considered.
Key words: optimum regulator, linear error.
Академия войсковой ПВО Вооруженных Сил РФ
им. Маршала Советского Союза , г. Смоленск
Поступила в редакцию 30.03.11.
