
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ФГУП «НПЦ газотурбостроения «Салют» (г. Москва)
УСТРАНЕНИЕ РЕЗОНАНСА НА КРИТИЧЕСКОЙ ЧАСТОТЕ ВРАЩЕНИЯ РОТОРА ПРИ ОВАЛЬНОЙ ДОРОЖКЕ КАЧЕНИЯ РОЛИКОВОГО ПОДШИПНИКА НА УПРУГОЙ ОПОРЕ
Одной из основных проблем надежности двухвальных газотурбинных двигателей является устранения резонанса роторов при критических частотах их вращения.
Известные способы изменения критических частот вращения роторов по изгибной форме колебаний, при которых они теряют устойчивость (резонанс) за счет изменения конструкции: массовых, геометрических характеристик и жесткостей валов / 1 /, часто затруднительны в реализации. Это связано с отсутствием возможности проводить конструктивные изменения на существующих двигателях и ввиду ряда ограничений, а также из-за того, что для высокооборотных двигателей невозможно избежать нахождения критических частот вращения в рабочем диапазоне эксплуатации двигателей.
Наиболее простой способ управления критическими частотами за счет изменения жесткостей опор применим только для скалочной формы колебаний, где он, безусловно, эффективен и совершенно не приемлем для отстройки по изгибной формы колебаний.
В данной публикации рассматривается возможность устранения резонанса ротора при критической частоте его вращения с помощью овализации дорожки качения неподвижного кольца роликового подшипника на упругой опоре.
Сущность способа заключается в том, что при овальных дорожках качения кольца подшипника круговое перемещение вектора центробежной силы от неуравновешенной массы ротора в зонах кольца подшипника, где радиус-вектор его контура возрастает, приводит к тому, что реакция опоры будет отсутствовать, и вал под действием неуравновешенной центробежной силы получит ускорение.
Полное отсутствие реакции опоры за время, равное четверти периода собственных колебаний ротора при свободной одной опоре, приведет к тому, что прогиб вала устранится, и это явление будет предотвращать потерю устойчивости ротора при критической частоте. Устранение прогиба вала будет происходить в двух четвертях оборота вала, где радиус-вектор контура кольца возрастает.
В двух других четвертях реакция опоры восстановится, и в этот период ротор будет находиться в режиме, который подвержен потери устойчивости, но так как этот процесс будет чрезвычайно кратковременным, потери устойчивости ротора не произойдет.
Это подтверждает тот факт, что при пребывании на критических оборотах роторов на проходных режимах, в течение времени, большем, чем четверть оборота, потери устойчивости роторов не происходит. Достаточно, чтобы было обеспечено устранение прогиба вала в одной четверти оборота.
В / 3-4 / определение радиального перемещения вала ротора на опоре с овальной дорожкой качения производилось не по усредненным весовым характеристикам ротора / 2 /, а с учетом реального расположения дисков на валу, что повышает точность расчета радиального перемещения вала на опоре и определения параметров овала при полном устранении прогиба вала и резонанса ротора.
В /3-4/ устранение резонанса на критической частоте его вращения рассматривалось только на абсолютно жестких опорах, что не соответствует реальным условиям работы роторов при жесткостях опор, равных С=106ч109 Н/м.
В / 5 / рассматривалась кинематика движения вала ротора на упруго податливой опоре при вертикальной овальности дорожки качения.
В данной работе рассматривается кинематика движения вала ротора на упруго податливой опоре при горизонтальной овальности дорожки качения, когда малая ось овала совпадает с направлением силы тяжести ротора.
Это позволяет применить способ устранения резонанса ротора на критической частоте его вращения с более податливыми опорами, чем при вертикальной дорожке качения, что расширяет область его применения и позволяет использовать более эффективные упруго-демпферные опоры.
1. Радиальное перемещение вала ротора на абсолютно жесткой
опоре с овальной дорожкой качения
При устранении реакции на одной опоре вал ротора под действием потенциальной энергии изогнутого вала будет распрямляться. Устранение прогиба будет реализовываться в соответствии со своей собственной частотой колебаний за четверть периода. При равенстве собственной частоты колебаний критической частоте вращения ротора полное устранение прогиба будет происходить в т. В. Этот случай соответствует наличию одного диска на валу, расположенного в середине пролета (Рис.1).
В действительности собственная частота колебаний ротора будет отличаться от критической частоты вращения. В / 2 / была определена собственная частота изгибных колебаний при отсутствии реакции на одной опоре и без ограничений перемещений вала ротора на опоре. При этом собственная частота колебаний ротора была выше критической частоты вращения. В этом случае устранение прогиба вала будет реализовываться раньше четверти оборота вращения, т. е. до подхода к т. В.
Однако в этом случае при распрямлении вала будет происходить перемещение конца вала на опоре с овальной дорожкой качения, что потребует дополнительного увеличение овала кольца.
При параметре овала кольца, определенного только при условии перемещения конца вала ротора под действием центробежной силы от неуравновешенной массы ротора необходимого для устранения реакции опоры, т. е. без дополнительного его увеличения для распрямления вала, устранение прогиба вала будет реализовываться по собственной частоте ротора, расположенного на двух опорах. Виртуальное перемещение конца вала в этом случае будет предотвращено возникающей реакцией опоры.
Собственная частота колебаний вращающего ротора на двух опорах была определена в / 3-4 / и она будет ниже критической частоты вращения. В этом случае посадка вала ротора на опору и возникновение реакции на ней будет в т. Е (Рис.1), и угол посадки ротора может определяться из условия
 ( 1 )
( 1 )
где в – параметр, определяющий посадку ротора в т. Е, при условии полного устранения прогиба вала, в=fK/fC; fК – критическая частота вращения ротора, при которой он теряет устойчивость; fс – собственная частота колебаний ротора.
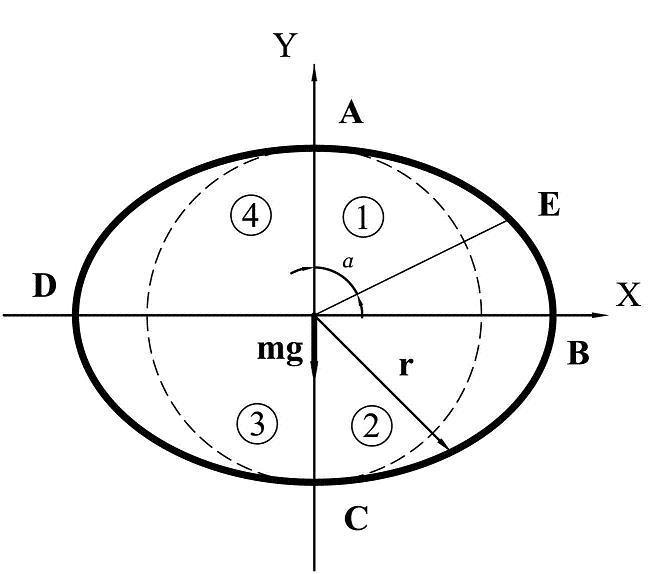
Рис.1 Вертикальная овальная дорожка качения кольца подшипника.
Уравнение контура кольца овальной формы опишем тригонометрической функцией (Рис.1)
![]() ( 2 )
( 2 )
где RO - радиус кольца подшипника по малой оси овала; Д - амплитуда (максимальное значение) отклонения контура кольца на большой оси овала относительно малой оси, Д = (Dmax-Dmin)/2; Dmax – максимальный диаметр овала; Dmin - минимальный диаметр овала; щ – круговая скорость вращения ротора.
Под действием центробежной силы от неуравновешенной массы ротора (статический дисбаланс) при отсутствии реакции на опоре вал будет перемещаться в радиальном направлении, и совершать угловое перемещение относительно опоры с круговыми кольцами подшипника (Рис. 2).
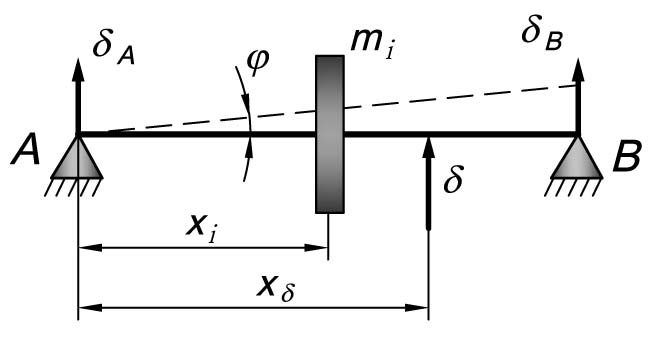
Рис. 2. Угловое перемещение вала относительно опоры “А”.
Круговое ускорение в этом случае будет определяться из выражения
 ( 3 )
( 3 )
где М – момент вращения от действия центробежной силы от статического дисбаланса ротора, ![]() ; дO – статический дисбаланс ротора, равный сумме дисбалансов на левой д1 и правой опоре д2, дO=д1+д2; хд – координата точки приложения дисбаланса ротора относительно опоры с круговыми кольцами, хд=д2L/(д1+д2); Ji –момент инерции каждого диска ротора относительно опоры с круговыми кольцами, Ji=mixi2; mi и xi – масса и координата диска относительно опоры с круговыми кольцами; L – пролет ротора.
; дO – статический дисбаланс ротора, равный сумме дисбалансов на левой д1 и правой опоре д2, дO=д1+д2; хд – координата точки приложения дисбаланса ротора относительно опоры с круговыми кольцами, хд=д2L/(д1+д2); Ji –момент инерции каждого диска ротора относительно опоры с круговыми кольцами, Ji=mixi2; mi и xi – масса и координата диска относительно опоры с круговыми кольцами; L – пролет ротора.
Из выражения ( 3 ) определяем угловое ускорение ротора при его вращении относительной опоры с круговыми кольцами
 ( 4 )
( 4 )
где JO – суммарный момент инерции ротора при его вращении относительно опоры c круговой дорожкой качения,
 . ( 5 )
. ( 5 )
При посадке вала ротора в т. Е его радиальное перемещение на опоре от действия статического дисбаланса составит
 ( 6 )
( 6 )
где Д - параметр овализации, Д = (Dmax-Dmin)/2; T*в/4=р*в/2щ.
Радиальное перемещение конца вала ротора на опоре с овальной дорожкой качения от статического дисбаланса ( 6 ) приведет к увеличению дисбаланса ротора. Угловое ускорение ротора при его вращении относительно неподвижной опоры от динамического дисбаланса дисков c массой mi будет равно
 . ( 7 )
. ( 7 )
Перемещение вала ротора на опоре от центробежной силы, возникающей от динамического дисбаланса в интервале времени от t= 0 до t2= Т*в/4 составит
 . ( 8 )
. ( 8 )
Перемещение ротора в т. Е определим как сумму перемещений от статического ( 6 ) и динамического дисбаланса ( 8 ).
Радиальное перемещение ротора в т. Е под действием центробежной силы от статического и динамического дисбалансов определится из выражения
 . ( 9 )
. ( 9 )
Принимая уравнение овального контура кольца подшипника в виде ( 2 ) и раскладывая в ряд Тейлора синус угла б при небольшой величине углового смещения от т. В до т. Е, определим минимальное значение овала при посадке вала в т. Е, когда вал ротора полностью распрямится
 (10)
(10)
где д - дисбаланс ротора на опоре с овальной дорожкой качения, д=дО*хд/L.
Установим перемещение вала на опоре с овальной дорожкой качения от собственного веса. Угловое ускорение ротора при его вращении относительно неподвижной опоры от собственного веса дисков будет равно
 . (11)
. (11)
Перемещение ротора с учетом его собственного веса определится из условия
 . (12)
. (12)
где с –параметр равный, ![]() .
.
Здесь знак минус принимается в первом квадранте, а знак плюс – в третьем.
Определим изменение динамического дисбаланса при реализации радиального перемещения от собственного веса ротора. Зависимость параметра с от в представлена на рис. 3.
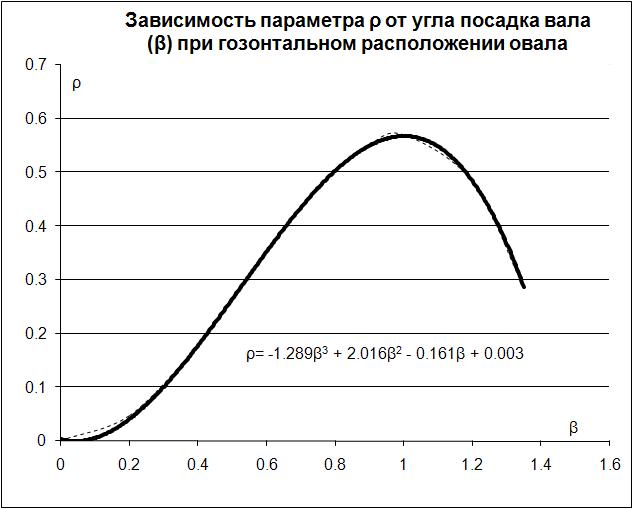
Рис.3 Зависимость параметра с от места посадки вала ротора на опоре (в).
Учитывая ![]() , представим распределение параметра с от времени в виде
, представим распределение параметра с от времени в виде
![]() . (13)
. (13)
Радиальное перемещение дисков ротора на опоре от его собственного веса в этом случае можно записать
 , (14)
, (14)
где т – параметр, равный т=2щ/р; m – масса ротора, приходящаяся на опору с овальной дорожкой качения,
 .
.
Угловое ускорение ротора при его вращении относительно опоры с круговой дорожкой качения от динамического дисбаланса составит
 . (15)
. (15)
Перемещение вала ротора на опоре от центробежной силы, возникающей от динамического дисбаланса, будет равно
 . (16)
. (16)
Перемещение ротора в т. Е определим как сумму перемещений от статического ( 6 ) и динамического дисбаланса ( 8 ) и (16), а также собственного веса ( 12 ).
Принимая уравнение овального контура кольца подшипника в виде ( 2 ) и раскладывая в ряд Тейлора синус угла б при небольшой величине углового смещения от т. В до т. Е, определим минимальное значение овала при посадке вала в т. Е, когда вал ротора полностью распрямится
 (17)
(17)
 ,
,
где д - дисбаланс ротора на опоре с овальной дорожкой качения; Д - параметр овализации.
2. Радиальное перемещение вала ротора на упругой опоре
с овальной дорожкой качения
Для упругих опор с определенной податливостью (обратная величина жесткости) в т. А под действием центробежной силы от неуравновешенной массы ротора происходит упругое смещение опоры. При круговом вращении вала от т. А за отрезок времени Дt точка контакта вала выходит на контур недеформируемой опоры (пренебрегая радиальным перемещением вала) и реакции опоры устраняется (Рис 1).
Определим минимальное значение жесткости опоры при совпадении малой оси овала с направлением силы тяжести ротора (горизонтальное расположение). Упругое смещение (вдавливание) вала в опору на малой оси овала определится как отношение центробежной силы ротора на опоре дщК2 от его дисбаланса д уменьшенное на величину силы тяжести ротора, приходящейся на опору с овальной дорожкой качения, к жесткости опоры С
 . (18)
. (18)
Представляя отклонение овального контура дорожки качения внешнего кольца от радиуса на меньшей оси овала в виде ![]() с учетом малого значения щКДt, раскладывая в ряд Тейлора, получаем
с учетом малого значения щКДt, раскладывая в ряд Тейлора, получаем ![]() .
.
Для выполнения условия малости аргумента при устранении реакции на опоре принимаем щkДt=0.15 и приравняем упругое вдавливание вала на малой оси к отклонению контура овала в этой точке
 . (19)
. (19)
Из последнего выражения получаем минимальное значение жесткости опоры для выполнения условия малости аргумента при выходе вала ротора на контур овала
 (20)
(20)
Определим параметры овала с учетом податливости опоры. Центробежная сила в т. А компенсируется реакцией опоры. При круговом движении вала ротора через интервал времени Дt он выходит на контур недеформируемой опоры, реакция опоры пропадает и действует только центробежная сила.
С этого момента начинает нарастать радиальное перемещение вала на опоре с овальной дорожкой качения. Минимальное значение параметра овала, определенное на абсолютно жесткой опоре, когда при посадке вала ротора произойдет устранение его прогиба, будет таким же и для податливой опоры, но реализация ее будет со сдвигом на величину Дt.
Радиальное перемещение вала ротора на опоре с овальной дорожкой качения на упругой опоре при критической частоте вращения ротора определим, как и для абсолютно жесткой опоре только при посадке вала ротора, определяющего минимальный параметр овала при значении параметра в увеличенного на вґ, определяемого из условия ![]()
![]() . (21)
. (21)
Перемещение вала ротора от статического и динамического дисбаланса на упругой опоре будет равно
 , (22)
, (22)
где д – статический дисбаланс ротора, приходящийся на опору с овальной дорожкой качения; m– масса ротора, приходящаяся на опору с овальной дорожкой качения; JO – суммарный момент инерции ротора при его вращении относительно опоры с круговыми кольцами,
 ;
;
Ji –момент инерции каждого диска ротора относительно опоры с круговой дорожкой качения, Ji=mixi2; в – коэффициент, равный, в=fK/fC; fK и fC – критическая частота вращения ротора и собственная частота колебаний ротора; щk - круговая критическая скорость вращения ротора.
Перемещением вала ротора от его собственного веса определим за время, определяемое с момента устранения реакции и до посадки вала ротора на опору. Однако данное перемещение с достаточной точностью можно определить в интервале времени от t= 0 до ![]() и оно составит
и оно составит
 , (23)
, (23)
где ![]() - коэффициент, равный,
- коэффициент, равный, ![]() .
.
Перемещением вала ротора на упругой опоре с овальной дорожкой качения от центробежных сил и собственного веса ротора составит
 . (24)
. (24)
Радиальным перемещением вала от центробежных сил в момент устранения реакции на опоре пренебрегаем ввиду его не существенного влияния.
Однако скорость, которую приобрел ротор в момент устранения реакции, оказывает более существенное влияние на радиальные перемещения при посадке вала ротора на опору.
Скорость вала ротора, которую он получит за время Дt =0.15/щК от центробежных сил статического дисбаланса будет равна
 , (25)
, (25)
где Дt – время, за которое вал ротора выходит на контур недеформируемого кольца и реакция опоры устраняется; е –угловое ускорение ротора при его перемещении относительно опоры с круговой дорожкой качения; д – дисбаланс ротора на опоре, с овальной дорожкой качения; JO – суммарный момент инерции ротора при его вращении относительно опоры с круговой дорожкой качения.
Перемещение вала ротора на опоре, которое определим с момента устранения реакции на упругой опоре до момента его посадке за время ![]() от скорости, которую он получил за время Дt, составит
от скорости, которую он получил за время Дt, составит
 . (26)
. (26)
Минимальное значение параметра овала, определенное с учетом упругости опоры и с учетом перемещения от скорости, полученной в момент устранения реакции, составит
 (27)
(27)
 .
.
3. Определения собственной частоты ротора
при одной свободной опоре
При устранении прогиба вала при свободном перемещении его на опоре с овальной дорожкой качения, определенного только при условии перемещения конца вала ротора под действием центробежной силы от неуравновешенной массы ротора и ограничения перемещений от распрямления вала, реализация процесса будет происходить по частоте собственных колебаний ротора на двух опорах.
Инерционные моменты дисков при угловых перемещениях и гироскопические моменты в расчет не принимаются, так как при плоских колебаниях вращающегося ротора они погашают друг друга / 4 /.
Рассмотрим уравнения динамического равновесия инерционных и упругих сил вала одного диска при не вращающемся роторе
 (28)
(28)
где б и г - поперечная сила и момент от единичного прогиба вала; д и в –поперечная сила и момент от единичного углового смещения; JC – осевой момент инерции диска; y и н - поперечное перемещение, и угол поворота диска.
Подставляя решение уравнений (28) в виде y=yО cosзt и н=нО cosзt, будем иметь
 (29)
(29)
где yО и нО – амплитуда поперечных и угловых перемещений плоских колебаний; з – круговая частота плоских колебаний.
При плоских колебаниях вращающегося диска в системе координат связанной с ним и совершающей круговое движение с частотой щ в уравнение (28) необходимо добавить только гироскопический момент без учета центробежных сил, так как при перемещении вала на опоре с овальной беговой дорожкой они не оказывают влияния на изгиб вала
 (30)
(30)
где Jс – полярный момент инерции; л – частота прецессии.
Во вращающейся системе координат ротора в плоскости, где происходят его колебания, будет происходить два вида движения диска.
Первое связано с колебаниями вала, а второе – с его круговым движением. Гироскопический момент диска в этом случае можно определить как при синхронной прецессии только при изменяющемся угле поворота диска в соответствии с фазой его колебаний.
Принимая частоту прецессии л, равной угловой скорости вращения вала щ и полагая для тонких дисков JC=Jс/2, получим значение гироскопического момента
![]() . (31)
. (31)
Подставляя решение уравнений (30) в виде y=yО cosщt и н=нО cosщt и после упрощений (31), получим уравнение плоских колебаний вращающегося ротора
 (32)
(32)
где yО и нО – амплитуда поперечных и угловых перемещений плоских колебаний вращающегося ротора.
Как видно из уравнений (32), динамический момент диска при плоских колебаниях и гироскопический момент при вращении диска погашают друг друга.
Следовательно, собственные частоты плоских колебаний вращающегося ротора будут соответствовать собственным частотам неподвижного ротора с нулевыми их моментами инерции. Это может быть реализовано в программном комплексе “ANSYS” при задании массовых характеристик точечными элементами “Mass 21” не имеющими инерционных характеристик при угловых смещениях дисков.
Выводы
Параметры овала определенные по данной методике устанавливают минимальное его значение, при котором произойдет полное устранение прогиба вала и потери устойчивости ротора с учетом упругости опоры.
Максимальное значение параметра овала Дmax, при котором также реализуется способ устранения резонанса определяется при большем значении параметра в чем при посадке в т. Е, равным 1.4 /1-3/ для жестких опор и 1.35 – для упругих опор.
ЛИТЕРАТУРА
1. , , Расчет на прочность деталей машин. М.: Машиностроение. 1979. 702 с.
2. , Способ устранения резонанса ротора турбореактивного двигателя при критической частоте его вращения с помощью овализации дорожки качения неподвижного кольца роликового подшипника // Двигатель. – Москва. - №1, 2012. – С.26-29.
3. Поведение роторов на критических частотах вращения при овализации дорожки качения роликового подшипника// Двигатель. – Москва. - №6, 2012. - C.22-23.
4. Устранение резонанса на критической частоте вращения роторов при эллиптической траектории вращения оси вала на опоре // Авиационно-космическая техника и технология.- Х: ХАИ. - 2013. Вып.10 (107). – С.60-65.
5. Устранение резонанса на критической частоте вращения роторов при эллиптической траектории перемещения оси вала на упругой опоре //Сборник научных трудов ХХХХШ Всероссийского симпозиума по механике и процессам управлении, т.2. –Миасс, 2013. – С.43-45.
