

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 676:658.5 621.01
Исследование рабочего органа пищевых оборудований
,
ТХТИ
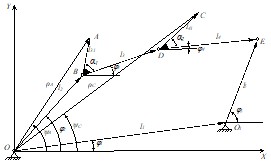
При проектировании оборудований пищевой промышленности часто требуются разработать механизмы, обеспечивающих заданные законы движения рабочего органа [1]. Для определения функций положения любых точек звеньев механизма (рабочего органа) в явной форме нами исследуется кинематика пятизвенного шарнирного соосного механизма.
Представим стороны механизма в виде векторов (рис. 1). Применяя метод векторной алгебры, из условия замкнутости векторов, имеем
![]() .
.
Спроектируя на оси координат получаем
 (1)
(1)
|
Рис. 1. Схема механизма |
В системе уравнений (1) нам известны и заданы параметры, ![]() а также
а также ![]() и
и ![]() . Необходимо определить в явной форме законы и формы движения точек А и С, относящихся звеньям 3 и 4 и их кинематических параметров. Также необходимо определить возможность взаимосвязи параметров
. Необходимо определить в явной форме законы и формы движения точек А и С, относящихся звеньям 3 и 4 и их кинематических параметров. Также необходимо определить возможность взаимосвязи параметров ![]() и
и ![]() , следовательно,
, следовательно,
 (2)
(2)
 (3)
(3)
Дифференцируя по времени – t систем уравнений (2) и (3), находим проекции скоростей и ускорений точек А и С на координатные оси,


также,
и
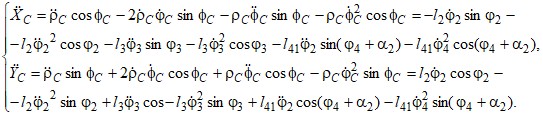
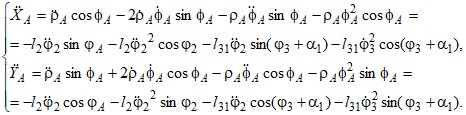
Теперь, определим радиусы векторы, абсолютные скорости и ускорения точек А и С.
![]()

![]()
![]()

![]()
Таким образом, мы вывели уравнения описывающие взаимосвязь геометрических и кинематических параметров. Как видим в полученных зависимостях требуют своего исключения неизвестные параметры ![]() и
и ![]() по этому из (1) исключаем одного из них и выразим через известных
по этому из (1) исключаем одного из них и выразим через известных ![]() и
и ![]() ,
,
![]()
Возводим каждое уравнение в квадрат и их сложим после некоторых преобразований получим,

Выделим слагаемые с углом ![]() и напишем,
и напишем,
![]()
где

используя подстановки:  и
и 
напишем

Возведя в квадрат обе части уравнения, получим

Или полученное квадратное уравнение напишем в следующем виде:
![]() ,
,![]()
где
Откуда ![]()
![]()
![]() ,
,
Для того, чтобы механизм существовал, необходимо выполнения условия, ![]() для всех значений
для всех значений ![]() и
и ![]() теперь исключая угол
теперь исключая угол ![]() найдем
найдем ![]()
Также нам необходимы ![]() и
и![]() , следовательно,
, следовательно,
В этих равенствах U32, U35, U42, U45 - передаточные функции, которые определяются дифференцированием φ3 и φ4 по φ2 и по φ5. i25, i52 передаточные отношения, получаемые использованием вариатора (редуктора) и для получения различных оборотов можно использовать реверсоры или же паразитные колеса.
Таким образом нами выведены основополагающие уравнения для механизма с двумя степенями свободы и полученная теория имеет частные случаи, которые могут быть использованы в конкретных объектах.
Список литературы:
1. Машины и аппараты пищевых производств. В 3 кн. Учеб. для вузов/ Под ред. акад. РАСХН и проф. .- Мн.: ИПЦ УО БГАТУ, 2007.
