

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
111 УДК 531
Теоретическая механика. Методические указания к выполнению расчетно-графических работ по разделу «Динамика»/ , / Моск. гос. строит. ун-т. М., МГСУ, 2009 -17с.
Методические указания предназначены для студентов очной и заочной форм обучения по всем специальностям
ISBN
©
©МГСУ, 2009
Раздел 1. Основные понятия.
Динамикой называется раздел механики, в котором изучают движение материальных тел в зависимости от действующих на них сил. Будем рассматривать три основных модели материальных тел: материальную точку, систему материальных точек и абсолютно твердое тело. Они объединены общим понятием механической системы. Для каждой из моделей постулируются уравнения движения точек механической системы. Относительно поля скоростей или перемещений точек тел уравнения движения являются дифференциальными. Наша задача состоит в определении закона и характеристик движения каждой точки механической системы в зависимости от действующих на систему сил. Часть сил является заданной. Это так называемые активные силы, приводящие систему в движение. Другая часть – силы реакций связей, то есть силы, не способные вызвать движение - является заранее неизвестной. Таким образом, задача определения движения точек механической системы и задача нахождения сил реакций связей решается совместно. Возможен подход, отделяющий задачу об определении закона движения механической системы от задачи определения неизвестных реакций связей. Он реализуется двумя методами. Идея первого метода состоит в интегрировании уравнений движения точек механической системы таким образом, чтобы силы реакции связей в эти интегралы не вошли. При этом полученные уравнения относятся к основным теоремам динамики. Второй метод состоит в использовании принципов механики.
Для изучения определений, аксиом и теорем динамики рекомендуем обратиться к следующей литературе: 1, 2. Приведем здесь лишь необходимые для изложения материала сведения.
Материальная точка.
Характеризуется массой ![]() и скоростью
и скоростью ![]() . Обозначим через
. Обозначим через ![]() равнодействующую всех приложенных к точке сил. Определим следующие понятия.
равнодействующую всех приложенных к точке сил. Определим следующие понятия.
Уравнение движения:
![]()
Количество движения (вектор импульса):
![]()
Момент количества движения (кинетический момент) относительно точки О, являющейся началом радиус-вектора ![]() материальной точки:
материальной точки:
![]()
Кинетическая энергия:
![]()
Механическая система из n материальных точек.
Характеризуется массами ![]() и скоростями
и скоростями ![]() точек. Обозначим через
точек. Обозначим через ![]() равнодействующую всех приложенных к
равнодействующую всех приложенных к ![]() -ой точке сил. При этом справедливо равенство:
-ой точке сил. При этом справедливо равенство: ![]() , где
, где ![]() - равнодействующая всех внешних по отношению к
- равнодействующая всех внешних по отношению к ![]() -ой точке сил (то есть сил взаимодействия
-ой точке сил (то есть сил взаимодействия ![]() -ой точки с материальными телами, не входящими в рассматриваемую механическую систему), а
-ой точки с материальными телами, не входящими в рассматриваемую механическую систему), а ![]() - равнодействующая всех внутренних по отношению к
- равнодействующая всех внутренних по отношению к ![]() -ой точке сил (то есть сил взаимодействия
-ой точке сил (то есть сил взаимодействия ![]() -ой точки с материальными точками данной системы). Определим следующие понятия.
-ой точки с материальными точками данной системы). Определим следующие понятия.
Уравнение движения системы точек:
![]()
Количество движения (вектор импульса):
![]()
Момент количества движения (кинетический момент) относительно точки О, являющейся началом радиус-векторов ![]() материальных точек:
материальных точек:
![]()
Кинетическая энергия:
![]()
Здесь и далее учтено свойство внутренних сил механической системы:
сумма всех внутренних сил системы равна нулю: ![]() .
.
Сплошное абсолютно твердое тело.
Характеризуется распределением плотностей ![]() и скоростей
и скоростей ![]() материальных частиц по объему
материальных частиц по объему ![]() тела. Плотность
тела. Плотность ![]() определяется как отношение массы
определяется как отношение массы ![]() к величине
к величине ![]() малого материального объема твердого тела:
малого материального объема твердого тела: ![]() . Обозначим через
. Обозначим через ![]() систему приложенных к телу сил. Определим следующие понятия.
систему приложенных к телу сил. Определим следующие понятия.
Уравнение движения:
![]()
Количество движения (вектор импульса):
![]()
Момент количества движения (кинетический момент) относительно точки О, являющейся началом радиус-векторов ![]() материальных частиц тела:
материальных частиц тела:
![]()
Кинетическая энергия:
![]() .
.
Напомним здесь некоторые определения:
момент силы ![]() относительно точки О:
относительно точки О:
![]()
![]() ,
,
где ![]() - радиус-вектор с началом в О для точки приложения силы
- радиус-вектор с началом в О для точки приложения силы ![]() ;
;
мощность силы ![]() :
:
![]() ,
,
где ![]() - скорость точки приложения силы
- скорость точки приложения силы ![]() ;
;
элементарная работа силы ![]() на малом перемещении
на малом перемещении ![]() :
:
![]() .
.
Далее нам потребуется еще два свойства внутренних сил механической системы:
сумма моментов всех внутренних сил системы относительно произвольной точки O равна нулю: ![]() ;
;
сумма мощностей всех внутренних сил геометрически неизменяемой механической системы (то есть с неизменными расстояниями между любыми точками системы) равна нулю: ![]() .
.
Раздел 2. Решение задач с помощью общих теорем динамики.
К общим теоремам динамики механической системы, которые мы будем использовать при решении задач, относятся:
Теорема об изменении количества движения:
![]() ;
;
теорема об изменении кинетического момента:
![]() ;
;
теорема о движении центра масс:
![]() ,
,
где ![]() - скорость центра масс,
- скорость центра масс, ![]() - масса всей механической системы;
- масса всей механической системы;
теорема об изменении кинетической энергии:
![]() .
.
Все они получены из уравнения движения механической системы. Следовательно, при решении динамических задач нет однозначного выбора в методе их решения. Тем не менее, при решении конкретной задачи о движении тел, в зависимости от вида совершаемого телами движения и вида определяемой в задаче величины, удобно использовать те или иные теоремы.
Рекомендуется следующая последовательность действий:
- графически изобразить систему тел, движение которых рассматривается в задаче;
- изобразить все внешние силы, действующие на рассматриваемую систему;
- установить вид движения, совершаемого каждым телом системы: поступательное, вращение вокруг неподвижной оси, плоскопараллельное и т. д.
- если в задаче требуется найти характеристику движения какого-либо из тел: перемещение точки тела, ее скорость или ускорение, угловую скорость или угловое ускорение тела, то обычно достаточно использовать одну из общих теорем динамики, записывая ее для движения всей системы тел в целом;
- выбор теоремы осуществляется из следующих соображений: если все тела в задаче совершают поступательное движение, то удобно использовать любую из следующих теорем: об изменении количества движения, о движении центра масс или теорему об изменении кинетической энергии; если по условию задачи тело совершает вращение вокруг неподвижной точки или оси, то удобно использовать теорему об изменении кинетического момента относительно указанной точки или оси; если тело движется плоскопараллельно или совершает свободное движение в пространстве, то необходимо применять либо теорему об изменении кинетической энергии, либо теорему о движении центра масс совместно с теоремой об изменении кинетического момента;
- если в задаче требуется найти силу реакции связи, наложенной на одно из тел, то теорему, описывающую движение системы тел в целом необходимо дополнить теоремой, описывающей движение данного тела, освобожденного от наложенных на него связей;
- дополнить полученные уравнения кинематическими соотношениями между телами в задаче;
- решить полученную систему уравнений; если в задаче ищутся скорости (линейные или угловые) или перемещения (углы поворота тел), то решение уравнений будет связано с их интегрированием; если в задаче ищутся только ускорения, то полученная система является линейной алгебраической и решается, соответственно, методами алгебры.
Пример 1. | Сдвоенный вал массы |
Рис. 1 |
Решение:
В данной механической системе из пяти твердых тел силы натяжения тросов являются внутренними. Поэтому для их определения будем рассматривать движение каждого из тел по отдельности. Освободим тела от связей и заменим связи соответствующими реакциями. Силовая схема и предполагаемое направление движения тел изображены на рисунке 1.
Число независимых переменных в данном примере равно двум. Выберем в качестве таких переменных вертикальную координату груза массы ![]() :
: ![]() и горизонтальную координату
и горизонтальную координату ![]() , задающую положение тележки. Эта пара однозначно определяет положение всех тел данной системы тел в любой момент времени.
, задающую положение тележки. Эта пара однозначно определяет положение всех тел данной системы тел в любой момент времени.
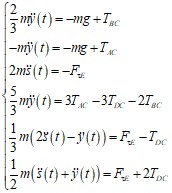
Грузы массой ![]() ,
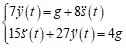
, ![]() и тележка совершают поступательное движение. Для описания их движения будем использовать теорему об изменении количества движения. Поскольку
и тележка совершают поступательное движение. Для описания их движения будем использовать теорему об изменении количества движения. Поскольку ![]() , в проекции на соответствующие оси координат получим:
, в проекции на соответствующие оси координат получим:
![]() 2 23
2 23
![]() 435
435
![]() 6 47
6 47
Сдвоенный блок вращается вокруг неподвижного центра ![]() . Обозначим через
. Обозначим через ![]() угловую скорость его вращения. Применим теорему об изменении кинетического момента
угловую скорость его вращения. Применим теорему об изменении кинетического момента ![]() . По определению:
. По определению: ![]() . Здесь:
. Здесь: ![]() - базисный вектор оси
- базисный вектор оси ![]() ,
, ![]() - момент инерции блока относительно оси
- момент инерции блока относительно оси ![]() , проведенной через точку
, проведенной через точку ![]() . В проекции на ось
. В проекции на ось ![]() получим:
получим:
![]() 8 59
8 59
Вал движется плоскопараллельно. Для описания его движения будем использовать теорему о движении центра масс и теорему об изменении кинетического момента (относительно центра масс). Центр масс однородного вала находится в точке ![]() . В проекции на ось
. В проекции на ось ![]() получим:
получим:
![]() 10 611
10 611
Математическая форма записи теоремы об изменении кинетического момента относительно центра масс имеет вид: ![]() . Кинетический момент для вала вычислим по аналогии с блоком:
. Кинетический момент для вала вычислим по аналогии с блоком: ![]() , где
, где ![]() - момент инерции вала относительно оси
- момент инерции вала относительно оси ![]() , проведенной через точку
, проведенной через точку ![]() . Поэтому:
. Поэтому:
![]() 12 713
12 713
Дополним уравнения (1.1) - (1.6) кинематическими соотношениями. Введенные нами функции координат ![]() и
и ![]() для груза массы
для груза массы ![]() и тележки позволяют представить скорости этих тел как:
и тележки позволяют представить скорости этих тел как: ![]() . Учет наложенных на тела связей даст следующие соотношения:
. Учет наложенных на тела связей даст следующие соотношения:
 14 815
14 815
Угловую скорость вала ![]() и линейную скорость
и линейную скорость ![]() его центра относительно неподвижной оси координат
его центра относительно неподвижной оси координат ![]() определим из рисунка 2, на котором представлено распределение абсолютных скоростей характерных точек вала.
определим из рисунка 2, на котором представлено распределение абсолютных скоростей характерных точек вала.
Из подобия треугольников получим: ![]() . Откуда определим длину стороны
. Откуда определим длину стороны ![]() :
: ![]() . Снова рассматривая подобные треугольники, найдем абсолютную скорость точки
. Снова рассматривая подобные треугольники, найдем абсолютную скорость точки ![]() :
:
![]() . 16917
. 16917
По формуле Эйлера определим угловую скорость вала:
![]() . 18 1019
. 18 1019
Аксиома 3 механики (3-й закон Ньютона) сокращает вдвое число неизвестных сил трения и сил натяжения тросов: ![]() . Моменты инерции блока и вала вычисляются по формулам:
. Моменты инерции блока и вала вычисляются по формулам: ![]() .
.
Подставим эти соотношения, а также выражения (1.7) - (1.9) и заданные в условии задачи значения масс и радиусов тел в уравнения (1.1) - (1.6). Получим систему из шести уравнений относительно шести неизвестных:
 201121
201121
Выразим из нее силы натяжения тросов:
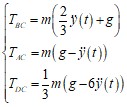
22 1223
и вторые производные от функций координат ![]() и
и ![]() :
:
 24 1325
24 1325
Поскольку при поступательном прямолинейном движении груза массы ![]() его ускорение
его ускорение ![]() , то из последних двух уравнений (1.12) найдем:
, то из последних двух уравнений (1.12) найдем:
![]() .
.
Из второго уравнения (1.12) и системы (1.11) находим силы натяжения тросов:
![]() .
.
Полученные значения и составляют ответ задачи.
Как видно из этого примера, необходимость определения внутренних сил системы или сил реакции опор приводит к системе уравнений в количестве большем, чем число степеней свободы в задаче. Если искомыми величинами в задаче являются кинематические характеристики точек или тел механической системы, то возможно обойтись числом уравнений, не превышающим число степеней свободы в задаче. Эффективным средством получения решения в этом случае является теорема об изменении кинетической энергии механической системы.
Пример 2. | Рассматривается система тел из примера 1. Условия этой задачи дополнены моментом сопротивления качению |

Рис. 2
Решение:
Кинематическая и силовая схемы представлены на рисунке 3. Применим теорему об изменении кинетической энергии к системе из пяти тел.
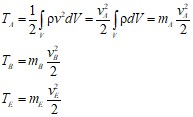
Вычислим кинетическую энергию ![]() системы по формуле:
системы по формуле: ![]() , где слагаемые представляют собой энергии каждого из тел. Для совершающих поступательное движение грузов и тележки получим:
, где слагаемые представляют собой энергии каждого из тел. Для совершающих поступательное движение грузов и тележки получим:
 26 1427
26 1427
Для блока, вращающегося относительно центра ![]() с угловой скоростью
с угловой скоростью ![]() , найдем:
, найдем:
![]() 281529
281529
Для вычисления кинетической энергии вала воспользуемся второй теоремой Кенига: ![]() , где кинетическая энергия вращения вала относительно осей Кенига:
, где кинетическая энергия вращения вала относительно осей Кенига: ![]() . Таким образом:
. Таким образом:
![]() . 30 1631
. 30 1631
Подставляя в уравнения (1.13) - (1.15) найденные в примере 1 кинематические соотношения (1.7) - (1.9), и значения масс тел и их радиусов, заданные в условии задачи, получим:
 32 1733
32 1733
Вычислим сумму мощностей сил, действующих на систему. Поскольку каждое из тел является абсолютно твердым, а соединяющие их тросы – натянутыми и нерастяжимыми, в выражении будут участвовать только внешние силы и внешний момент сопротивления:
![]() . 34 1835
. 34 1835
Мощности сил реакции ![]() равны нулю, поскольку равны нулю скорости точек приложения этих сил. Мощности сил тяжести
равны нулю, поскольку равны нулю скорости точек приложения этих сил. Мощности сил тяжести ![]() равны нулю, поскольку эти вектора направлены перпендикулярно скоростям точек их приложения.
равны нулю, поскольку эти вектора направлены перпендикулярно скоростям точек их приложения.
Подставляя выражения (1.16), (1.17), (1.9) в уравнение, выражающее формулировку теоремы об изменении кинетической энергии: ![]() , получим дифференциальное уравнение задачи:
, получим дифференциальное уравнение задачи:
![]() 36 1937
36 1937
Сгруппируем в (1.18) слагаемые отдельно при ![]() и отдельно при
и отдельно при ![]() :
:
![]() . 382039
. 382039
Данное уравнение должно выполняться при произвольных скоростях ![]() и
и ![]() . А это возможно лишь при одновременном выполнении следующих условий:
. А это возможно лишь при одновременном выполнении следующих условий:
 402141
402141
Система уравнений полностью определяет кинематические характеристики в задаче. Относительно искомой величины: ![]() эта система является линейной алгебраической. Ее решение имеет вид:
эта система является линейной алгебраической. Ее решение имеет вид:
 422243
422243
При нулевом моменте сопротивления качения вала этот ответ, очевидно, совпадает с ответом примера 1.
Раздел 3. Решение задач с помощью принципов механики.
К принципам механики относятся: принцип Даламбера, принцип возможных перемещений, общее уравнение динамики, уравнения Лагранжа 2-го рода. Рассмотрим последний из них. Пусть имеется механическая система из ![]() точек с наложенными на них связями. Положение точек задается радиус-векторами
точек с наложенными на них связями. Положение точек задается радиус-векторами ![]() . Обозначим через
. Обозначим через ![]() равнодействующую всех активных сил, действующих на
равнодействующую всех активных сил, действующих на ![]() -ю точку системы. Обозначим через
-ю точку системы. Обозначим через ![]() - минимальный набор параметров, однозначно определяющий положение механической системы, называемый обобщенными координатами системы. Обобщенные скорости определяются как производные по времени от обобщенных координат:
- минимальный набор параметров, однозначно определяющий положение механической системы, называемый обобщенными координатами системы. Обобщенные скорости определяются как производные по времени от обобщенных координат: ![]() . Через
. Через ![]() обозначим обобщенные силы, определяемые формулой:
обозначим обобщенные силы, определяемые формулой: ![]() , через
, через ![]() - кинетическую энергию механической системы. Тогда уравнения Лагранжа 2-го рода примут следующую форму записи:
- кинетическую энергию механической системы. Тогда уравнения Лагранжа 2-го рода примут следующую форму записи:
 .
.
Использование уравнений особенно эффективно при решении задач с несколькими степенями свободы. Проиллюстрируем их применение на примере.
Пример 3. | Сохраняя условие примера 1, найти скорость груза массой |
Решение:
Кинематическая и силовая схемы представлены на рисунке 4. В качестве обобщенных координат выберем: ![]() .
.
Кинетическая энергия системы из пяти тел найдена нами в примере 2:
 442345
442345

Рис. 3 |
Найдем обобщенные силы ![]() . Для этого среди всех возможных перемещений
. Для этого среди всех возможных перемещений ![]() тел, вызванных произвольными действительными силами
тел, вызванных произвольными действительными силами ![]() , и не нарушающих наложенные на тела связи, рассмотрим такие, что:
, и не нарушающих наложенные на тела связи, рассмотрим такие, что:
1. ![]() .
.
Тогда работа всех активных сил системы тел на таком возможном перемещении вычисляется следующим образом:
 .
.
С другой стороны, по определению работы силы:
![]() .
.
Отсюда:
 . 462447
. 462447
2. ![]() .
.
Тогда работа всех активных сил системы тел на таком возможном перемещении вычисляется следующим образом:
![]() .
.
С другой стороны, по определению работы силы:
![]() .
.
Отсюда:
![]() . 482549
. 482549
Запишем уравнение Лагранжа  для случая
для случая ![]() :
:
![]() .
.
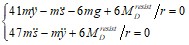
Откуда найдем первое дифференциальное уравнение задачи:
![]() 502651
502651
Запишем уравнение Лагранжа  для случая
для случая ![]() :
:
![]() .
.
Откуда найдем второе дифференциальное уравнение задачи:
![]() . 522753
. 522753
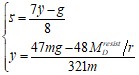
Решая полученную систему уравнений, найдем:
 542855
542855
Считая, что система тел пришла в движение из состояния покоя, найдем интегрированием: ![]() . Значение угловой скорости вала
. Значение угловой скорости вала ![]() как функции времени определим из (1.9):
как функции времени определим из (1.9): ![]() . Угол поворота вала
. Угол поворота вала ![]() также найдем интегрированием, считая, что его начальное значение в задаче – нулевое:
также найдем интегрированием, считая, что его начальное значение в задаче – нулевое: ![]() . Нас интересует момент времени
. Нас интересует момент времени ![]() , при котором вал совершит один полный оборот:
, при котором вал совершит один полный оборот: ![]() . Откуда находим:
. Откуда находим: ![]() . Таким образом, искомая скорость груза:
. Таким образом, искомая скорость груза: ![]() . Данное значение является ответом задачи.
. Данное значение является ответом задачи.
Литература.
Теоретическая механика. Часть III. Динамика: Учебное пособие по теоретической механике/ , , ; / Моск. гос. строит. ун-т, М., МГСУ, 2007. – 134 с. Курс теоретической механики. Ч. II. Динамика: Учебник для техн. вузов.- 6-е изд., испр. – М.: Высш. школа, 1984. – 423 с., ил.
СОДЕРЖАНИЕ
Раздел 1. Основные понятия | 3 |
Раздел 2. Решение задач с помощью общих теорем динамики | 5 |
Раздел 3. Решение задач с помощью принципов механики | 13 |
Литература. | 16 |
