


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
- ошибка, остающаяся по окончании переходного процесса; перерегулирование; время регулирования; число колебаний регулируемой величины в заданное время; степень колибательности.
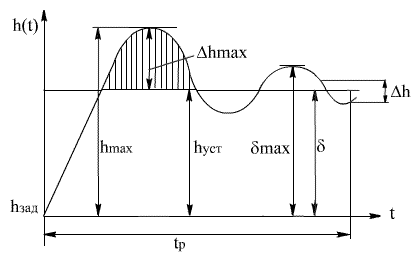
Рис. 4.9 Процесс регулирования с указанием показателей качества регулирования
1) Ошибка, остающаяся по окончании переходного процесса, т. е. ошибка в установившемся режиме работы, которая может состоять из двух составляющих.
Первая составляющая этой ошибки, обусловленная точностью действия отдельных звеньев, зависит от трения, люфтов, зазоров и т. д. Эта составляющая определяет зону нечувствительности САУ.
Следовательно, в установившихся режимах работы величина регулируемого параметра h(t) не будет строго постоянной во времени. В технических требованиях указываются отклонения, например фактического значения регулируемого параметра h от оптимального hуст.
Вторая составляющая рассматриваемой ошибки – максимальная допустимая статическая ошибка макс и (неравномерность регулирования), которая зависит от величины нагрузки в статической системе и равна нулю в астатической.
Статическая ошибка равна разности между установившимся значением регулируемой величины hуст и ее заданным значением hзад. Если статическая ошибка и максимальная допустимая статическая ошибка макс равны нулю, то регулирование и система являются астатическими.
2) Перерегулирование – максимальное отклонение регулируемой величины, которое не должно превышать максимального допустимого значения, т. е. hмакс hдоп. В данном случае фактическое значение регулируемого параметра h(t) в переходном процессе превышает установившееся значение hуст, т. е. в системе имеет место перерегулирование. Максимальная величина перерегулирования hмакс=hмакс-hуст или  (hмакс – максимальное значение регулируемого параметра).
(hмакс – максимальное значение регулируемого параметра).
Максимальные отклонения в переходном процессе регулируемой величины от ее установившегося значения также называют динамическими ошибками hмакс=hдин.
3) Время регулирования tр – это промежуток времени, по истечении которого абсолютная величина |h(t)- hуст| не превышает ширины зоны нечувствительности h.
Практически временем регулирования tр – называют промежуток времени (от начала переходного процесса), в течение которого абсолютная величина переходной ошибки становится меньше допускаемой (обычно она составляет 3-5% установившегося значения регулируемого параметра). Период времени отt1до t2 и есть время регулирования. Время регулирования tр= t2- t1, или быстродействие САУ, зависит от вида, числа и характера включения звеньев, входящих в данную систему.
4) Число колебаний регулируемой величины в заданное время, которое не должно превышать определенного значения. В связи с этим в некоторых системах должен быть апериодический (монотонный) переходный процесс при минимальном времени протекания, в некоторых системах целесообразнее обеспечивать колебательный переходный процесс, не допуская перерегулирования, т. е. hмакс hдоп
5) Степень колебательности характеризует характеризует интенсивность затухания колебательного процесса, причем не всего переходного процесса, а наиболее медленно затухающей составляющей (рис.-4.10). Количественной оценкой интенсивности затухания служит степень затухания , определяемая по формуле:  (наиболе часто =0,75-0,9).
(наиболе часто =0,75-0,9).
17.Влияние законов регулирования на показатели качества процесса регулирования.
Минимально возможное время регулирования tp для различных законов регулирования и типов регуляторов при оптимальной их настройке определяется таблицей 1.
Теоретически, в системе с запаздыванием, минимальное время регулирования tPMIN = 2 Td.
В таблице 1 приведены рекомендации по выбору закона регулирования и типа регулятора исходя из величины отношения запаздывания Td к постоянной времени объекта Т. Если Td /Т < 0,2, то можно выбрать релейный, непрерывный или цифровой регуляторы. Если 0,2 < Td /Т < 1, то должен быть выбран непрерывный или цифровой, ПИ-, ПД-, ПИД-регулятор.
Если Td /Т > 1 , то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях Td /Т.
Таблица 1 - Выбор закона регулирования и типа регулятора по отношению Td /Т и tP Acd
Соотношение Td /Т | Соотношение tp /Td | Характеристика обьекта | Закон регулирования и тип регулятора | |
по запаздыванию и инерционности | по степени регулируемости | |||
0<Td /Т<0,05 | Без запаздывания | Очень хорошо регулируемый | Релейный, непрерывный П-, ПИ-, ПД-, ПИД-регулятор | |
0,05<Td /Т<0,1 | С большой инерционностью и с малым запаздыванием | Очень хорошо регулируемый | Релейный, непрерывный П-, ПИ-, ПД-, ПИД-регулятор | |
0,1 <Td /Т<0,2 | С существенным транспортным запаздыванием | Хорошо регулируемый | Релейный, непрерывный П-, ПИ-, ПД-, ПИД-регулятор | |
0,2<Td /Т<0,4 | С существенным транспортным запаздыванием | Еще регулируемый | Непрерывный или цифровой ПИ-, ПД-, ПИД-регулятор | |
0,4<Td /Т<0,8 | С существенным транспортным запаздыванием | Трудно - регулируемый | Непрерывный или цифровой ПИ-, ПД-, ПИД-регулятор | |
0,8<Td /Т<1 | С большим транспортным запаздыванием | Очень трудно - регулируемый | Непрерывный или цифровой ПИ-, ПД-, ПИД-регулятор | |
Td /Т>1 | С большим транспортным запаздыванием | Очень трудно регулируемый | Цифровой регулятор с упредителем | |
tP /Td > 6,5 | Непрерывный или цифровой, П-регулятор | |||
tP /Td > 12 | Непрерывный или цифровой, ПИ-регулятор | |||
tP /Td > 7 | Непрерывный или цифровой, ПИД-регулятор | |||
Примечания. tP - время регулирования, Td - запаздывание в объекте, Т - постоянная времени объекта.2. Релейный регулятор - двухпозиционный, трехпозиционный, многопозиционный регулятор. |
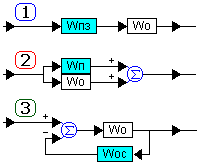
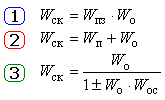
18.Основные типы соединения звеньев.
1) Параллельное соединение.
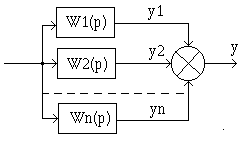
Эта структурная схема преобразуется к виду:
 (2.20)
(2.20)
Передаточные функции параллельных звеньев складываются.
2) Последовательное соединение.

Передаточные функции последовательных звеньев перемножаются.
 (2.21)
(2.21)
3) Обратная связь.
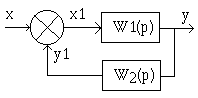
Для разомкнутой системы общая ПФ: ![]()
![]()
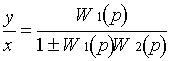
Для положительной ОС -, для отрицательной ОС +.
Общая ПФ замкнутой одноконтурной системы:
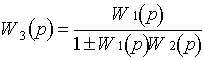 (2.22)
(2.22)
ПФ для разомкнутой системы:
![]() (2.23)
(2.23)
19.Улучшения качества регулирования посредством введения
корректирующего звена.
Задача коррекции состоит в повышении динамической точности САР в переходных режимах. Она возникает, поскольку стремление снизить ошибки регулирования в типовых режимах, приводит к необходимости использования таких значений общего коэффициента усиления, при которых без принятия спец. мер (внедрения пассивных звеньев) система оказывается неустойчивой.
Способы введения корректирующих звеньев
Результирующие ПФ:
| Формулы эквивалентных
|
Показания к применению:
20.Прерывистые импульсные системы регулирования.
Прерывистой системой называется такая САР, в которой непре-рывное изменение регулируемого параметра соответствует прерывистому изменению воздействия хотя бы в одном из элементов системы.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
