
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ФИЛЬТРЫ – ЧЕТЫРЕХПОЛЮСНИКИ ИЗ МОДУЛЕЙ
В электромеханических системах для получения благоприятной динамики применяются устройства последовательной и параллельной коррекции, реализуемые пассивными корректирующими устройствами на базе фильтров – четырехполюсников с использованием активных сопротивлений и конденсаторов [1], c. 416 – 453.
В [2], с. 42 – 54, [3], c. 18 – 33, [4], c. 26 – 36 рассмотрены схемы и методики расчета и выбора элементов этих схем для электропривода постоянного тока. В частности, такой фильтр требуется для реализации ДЭМС стабилизации скорости на базе эквивалентного двигателя [5], что позволяет при синтезе этой системы ограничиться измерением угловой скорости двигателя.
Для реализации фильтров – четырехполюсников предлагаются схемы, построенные на использовании модулей, в каждом из которых параллельно соединены активное сопротивление R и конденсатор С, либо – один из этих элементов. Рассмотрены варианты реализации фильтров.
1. Четырехполюсник из двух модулей
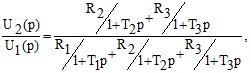
Напряжение ![]() приложено к цепи из двух последовательно включенных модулей [
приложено к цепи из двух последовательно включенных модулей [![]() ], а падение напряжения на
], а падение напряжения на ![]() определяет U2(p).
определяет U2(p).
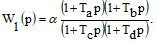
![]()
где
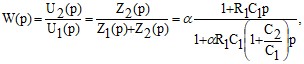
где
Для получения W(p) необходимо знать ![]() ,
, ![]() и б. Если заданы
и б. Если заданы ![]() и
и ![]() , то определяем:
, то определяем:


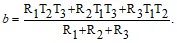
где
При  , то
, то ![]() > T и
> T и ![]() > 1;
> 1;
при  , то
, то ![]() < T и
< T и ![]() < 1.
< 1.
Так как б всегда меньше единицы, то принимаем ![]() .
.
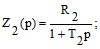
Если в модуле ![]() сопротивление
сопротивление ![]() отсутствует, чему соответствует
отсутствует, чему соответствует![]() , то
, то
![]()
 где
где ![]()
Тогда

причем R2 должно определяться с учетом входного сопротивления последующего звена.
Если рассматривать  то соответствующая
то соответствующая ![]() ЛАЧХ при ф* > 1 в диапазоне частот от
ЛАЧХ при ф* > 1 в диапазоне частот от ![]() до
до ![]() имеет наклон
имеет наклон
–20 дБ/декаду, а на остальных частотах 0 дБ/декаду.
ЛАЧХ реального дифференцирующего звена до частоты
имеет наклон + 20 дБ/декаду, а на остальных частотах 0 дБ/декаду.
Вообще ![]() может быть как меньше единицы, так и больше единицы: все определяют
может быть как меньше единицы, так и больше единицы: все определяют ![]() и
и ![]() .
.
Рассмотрим вариант ![]() < 1.
< 1.
Например, задано ![]() . Принимаем
. Принимаем ![]() , то есть меньше
, то есть меньше ![]() . Выбираем
. Выбираем ![]() и определяем
и определяем ![]()
Тогда ![]()
![]() .
.
Выбираем ![]() и определяем
и определяем ![]() и
и ![]() .
.

 где
где ![]() и
и ![]() .
.
Если при ![]() принять
принять ![]() , то
, то
![]()
![]()
Выбираем ![]() и определяем
и определяем ![]() и
и ![]() .
.

 где
где ![]() и
и ![]() .
.
Рассмотрим вариант ![]() > 1.
> 1.
Например, задано ![]() . Принимаем
. Принимаем ![]() и любые
и любые ![]() . Если принять
. Если принять ![]() то
то![]()
![]()
Выбираем ![]() и определяем
и определяем ![]() и
и ![]() .
.

 где
где ![]()
Если принять ![]() то
то
![]()
![]()

 где
где ![]() .
.
2. Четырехполюсник из трех модулей
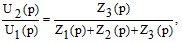
Напряжение ![]() приложено к цепи из трех последовательно включенных модулей [
приложено к цепи из трех последовательно включенных модулей [![]() ], а падение напряжения на
], а падение напряжения на ![]() определяет
определяет ![]() .
.
 где
где 
![]()
![]()
![]()



где 

При ![]()
![]() . Если принять
. Если принять ![]() , то
, то ![]()
![]() ,
, ![]() ;
;

Тогда для знаменателя 
Если принять ![]() , то
, то ![]() , и знаменатель представляет собой два последовательно соединенных апериодических звена – см [1, стр 179].
, и знаменатель представляет собой два последовательно соединенных апериодических звена – см [1, стр 179].
Следовательно, в этом случае

где ![]()
![]() ;
; ![]() ;
; ![]()
Этой передаточной функции соответствует ЛАЧХ с трапецеидальной характеристикой [2], с. 28-30.
Предлагается второй вариант с тремя модулями.
Напряжение ![]() приложено к цепи из трех последовательно включенных модулей [
приложено к цепи из трех последовательно включенных модулей [![]() ], а падение напряжения на двух модулях [
], а падение напряжения на двух модулях [![]() ] определяет
] определяет ![]() .
.
где 

![]()
![]()
![]()
![]()

где 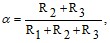

При ![]()
![]() и
и ![]() :
: ![]()
![]() ,
, ![]() .
.
Коэффициент демпфирования для числителя:
 при
при ![]() :
: ![]()
Коэффициент демпфирования для знаменателя:
 при
при ![]() :
: ![]()
При ![]() и
и ![]() и числитель и знаменатель представляет каждый два последовательно соединенных апериодических звена, то есть:
и числитель и знаменатель представляет каждый два последовательно соединенных апериодических звена, то есть:
 где
где ![]()
![]()
![]()
![]()
![]()
Получился фильтр-четырехполюсник последовательного корректирующего звена с трапецеидальной ЛАЧХ [2, с. 28-30].
Таким же способом можно рассмотреть варианты:
– при различных значениях Т1, Т2 и Т3, отличающихся от нуля;
– положив не Т3 = 0, а Т2 = 0;
– во всех вариантах отказаться от R1 = R2 = R3.
Литература:
1. Основы автоматического регулирования. Теория. Под редакцией ГНТИ машиностроительной литературы, М.: 1954.
2. Автоматическое управление электроприводами. Конспект лекций. Часть 2, НЭТИ, Новосибирск, 1971. – 129 с.
3. Управление электроприводами. Методические указания к курсовому проектированию. НИИВТ, Новосибирск, 1986. – 47 с.
4. , , Автоматическое управление электроприводами. Методическое пособие по курсовому проектированию для специальности 0628 «Электропривод и автоматизация промышленных установок» Таллин, 1988 – 168 с.
5. Вариант астатической двухмассовой электромеханической системы стабилизации скорости на базе эквивалентного двигателя. «Электричество», 1995, - № 9 – с.23 – 27.
