Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
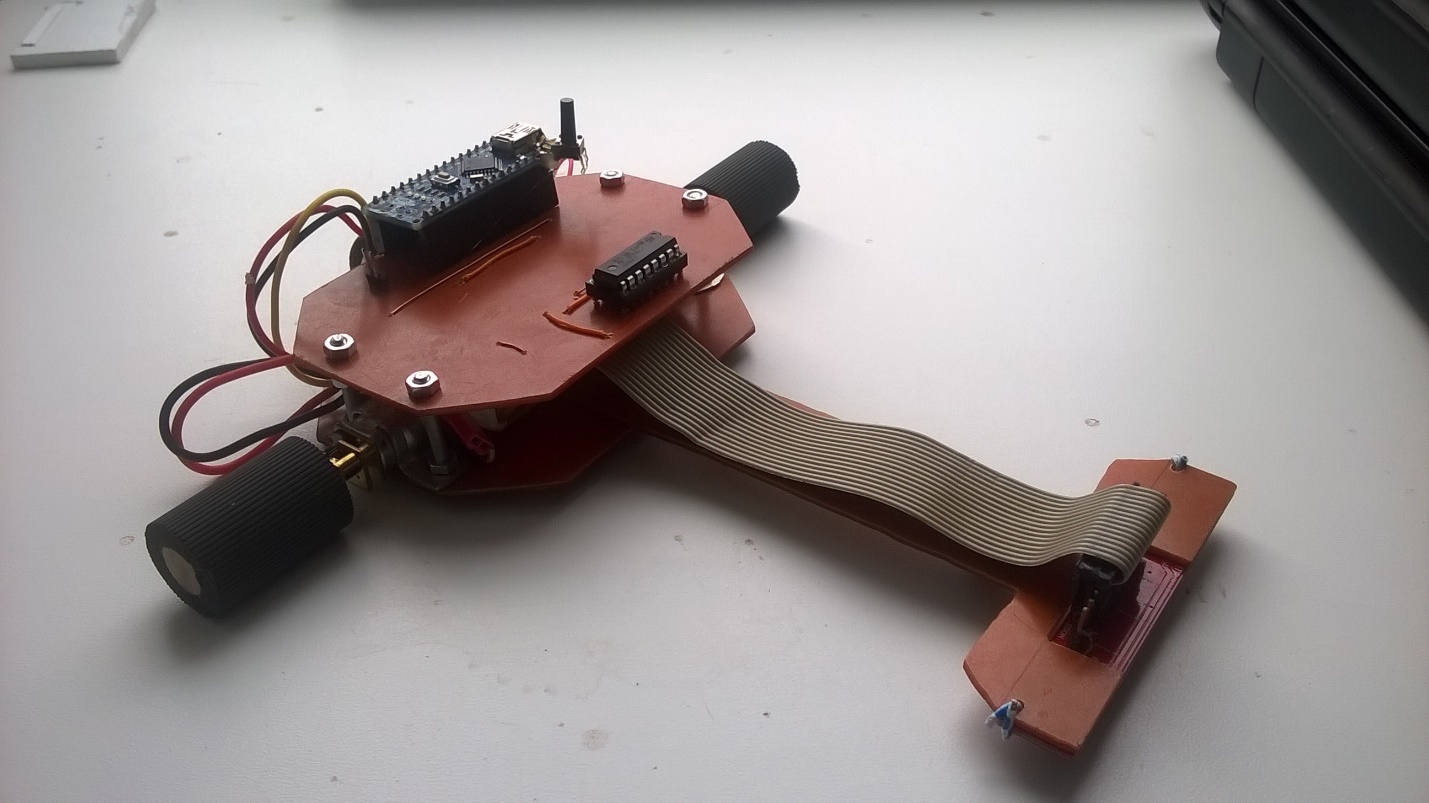
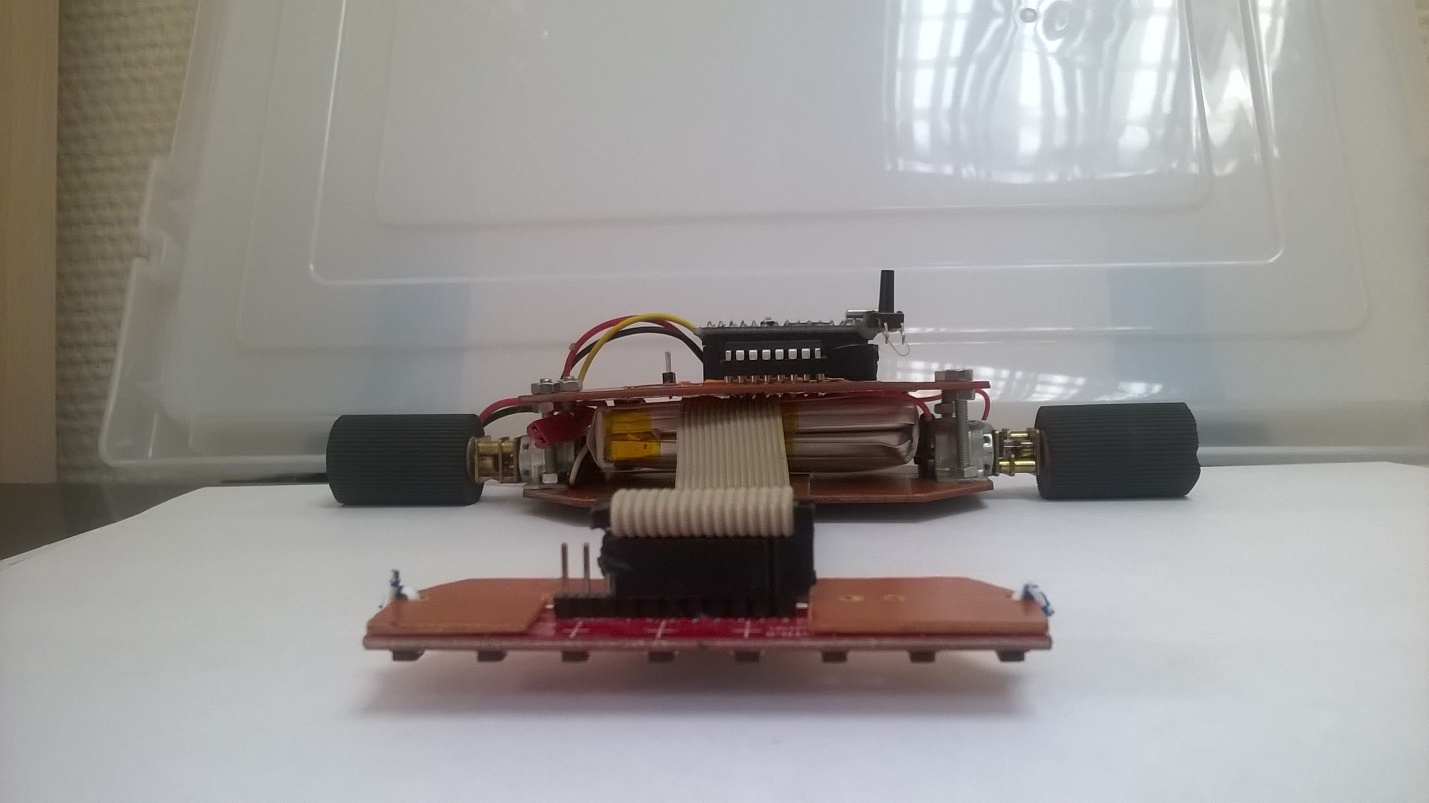
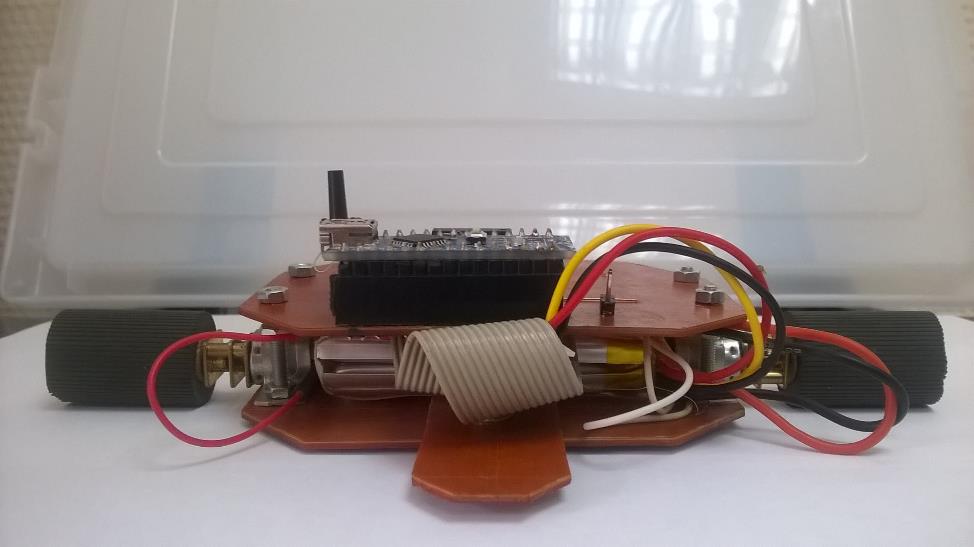
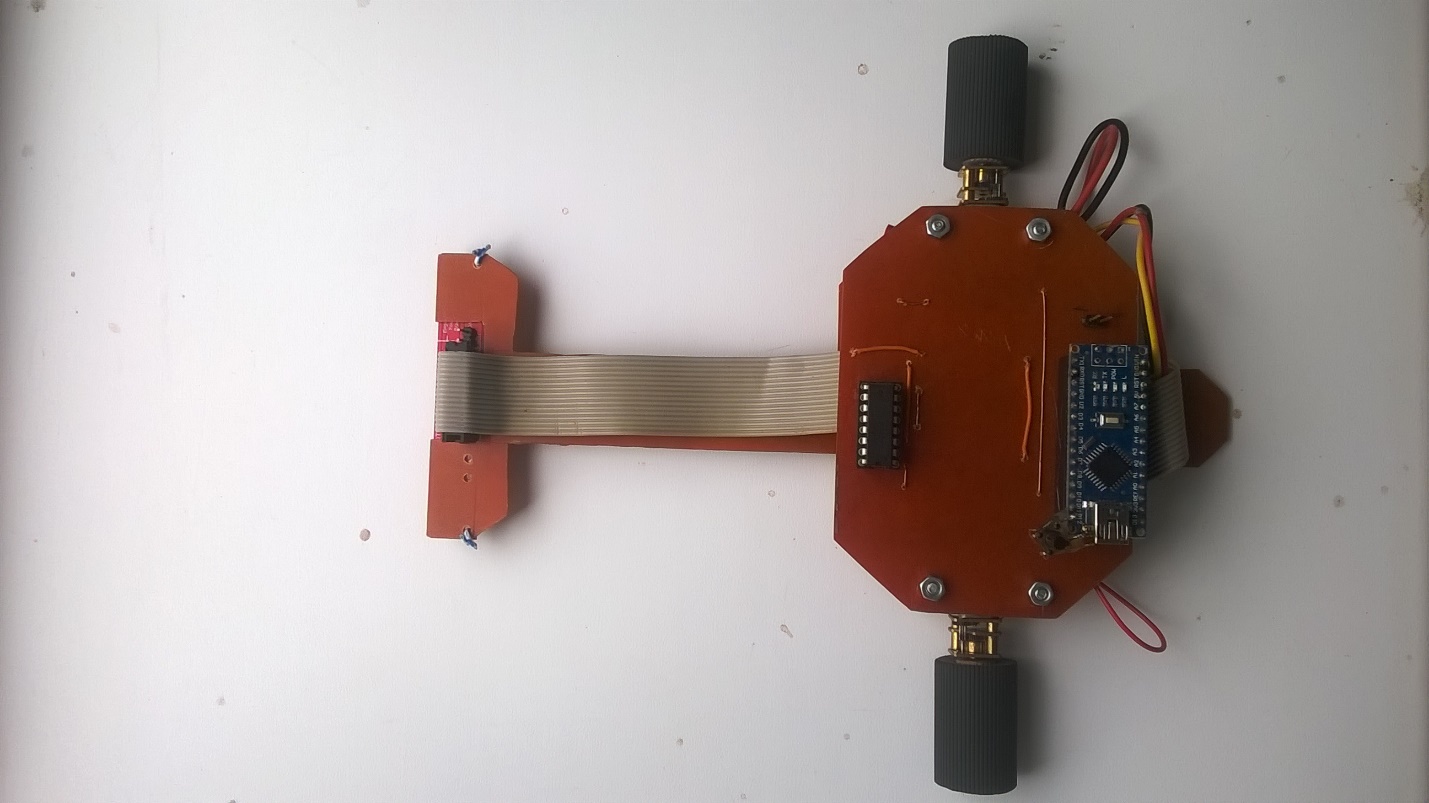
Робот «ROBOT-33»
для участия в соревнованиях «Робофинист-2016» в категории «Следование по узкой линии: высшая лига»
Робот изготовлен из текстолита, имеет два ведущих колеса, использует микроконтроллер Arduino Nano в качестве блока управления. Для питания робота используется Li-Po аккумулятор напряжением 7.4 В. Робот имеет массив инфракрасных датчиков для определения линии. Программа написана на Arduino IDE. Для управления роботом используется PID регулятор. Расчетная скорость робота по изогнутой траектории 1.1 м/с. Тестовый полигон длиной 14 метров робот проходит за 13 секунд.
Проект выполнили: Блохин Николай, Фугин Данила.
Руководитель проекта: .
Фото робота: