


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
, ,
ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ПРОГРАММ УПРАВЛЕНИЯ ЛА НА ОСНОВЕ СЕТОЧНЫХ ФУНКЦИЙ *
При проектировании космических аппаратов (КА) и баллистических ракет (БР), а также при планировании их применения часто возникает необходимость совершенствовать специальное математическое и программное обеспечение (СМПО) расчёта траекторий их полёта. В основе такого СМПО лежат математические модели движения (ММД).
Для достижения требуемой точности моделирования и повышения оперативности разработки ММД в [1] предложена новая технология моделирования движения летательных аппаратов (ЛА), основанная на аналитической аппроксимации отдельных участков программы управления полётом. Для реализации такой технологии при решении краевых и оптимизационных задач баллистического проектирования разработаны унифицированные ММД [2]. Применение названных ММД оказалось эффективным и при решении задач построения пространственно-временной последовательности движения элементов оснащения ЛА. Одной из таких задач является задача выбора программ управления для совокупности из n ЛА с целью обеспечения синхронизации их подлёта к целям.
Входными данными при решении названной задачи являются сеточные функции дальности и полного времени полёта, построенные с помощью унифицированных ММД. При этом система дифференциальных уравнений полёта интегрируется модифицированным методом Нюстрёма [1].
Для решения рассматриваемой задачи предложен метод визуализации результатов расчетов серии прямых баллистических задач [3]. Показано, что целесообразно визуализировать не сами поверхности концевых условий, а изолинии равных значений того или иного концевого условия: в нашем случае, дальности полета (Sсф) и полного полетного времени (Тп). Каждая точка пересечения указанных изолиний для заданных условий применения ЛА (Sсф = Sзад и Tп = Tзад) определяет параметры программы управления, обеспечивающие ее полет на дальность Sзад за время Tзад.
На основе предложенного метода решения краевой баллистической задачи (КБЗ) разработана методика, позволяющая оптимизировать параметры программы полёта каждого ЛА заданной совокупности таким образом, чтобы обеспечить одинаковое время подлёта всех ЛА к целям. В основе методики заложены разработанные в ходе исследований следующие алгоритмы:
1) алгоритм построения линий заданных уровней концевых условий сеточной функции двух переменных (изолиний);
2) алгоритм определения точек пересечения двух интерактивно выбранных изолиний;
3) алгоритм нахождения максимального и минимального значения сеточной функции по изолиниям оптимизируемой сеточной функции с учётом ограничений, задаваемых другой сеточной функцией;
4) алгоритм многопараметрической оптимизации параметров программ управления типа «волна» с заданной структурой.
При реализации рассмотренных алгоритмов было разработано программно-математическое обеспечение, решающие поставленные задачи оптимизации с помощью визуализации изолиний дальности полета (Sсф) и полного полетного времени (Тп). Внешний вид главного окна разработанного программного комплекса, именуемого IsolineGraf, представлен на рис. 1.
|
Рис.1. Главное окно программы IsolineGraf |
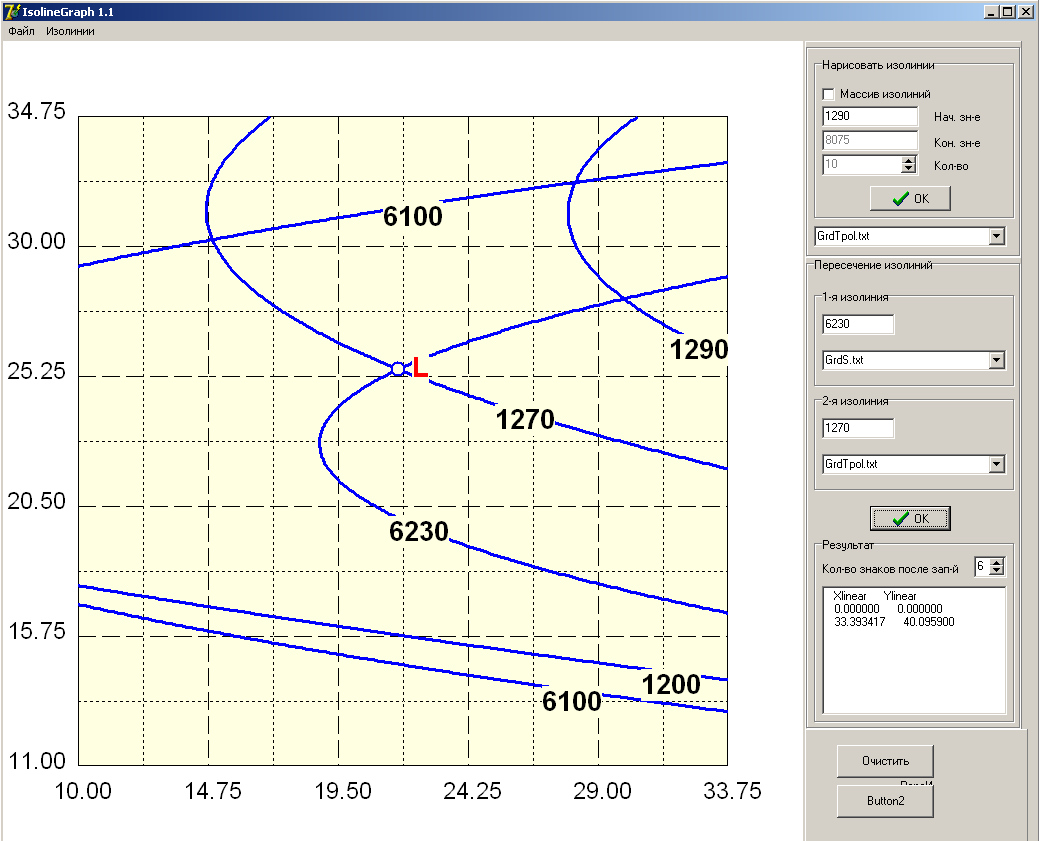
Комплекс включает в себя программные модули, реализованные в среде программирования Delphi, а также графический интерфейс для визуализации результатов вычислений. Отличительными особенностями этого программного комплекса является наглядность, возможность одновременной работы с несколькими функциями, отображающими краевые и оптимизационные условия.
При решении задачи был реализован алгоритм построения изолиний [4], предназначенный для вычисления координат точек изолиний таблично заданных функций. При этом использовалась одномерная кубическая сплайн-аппроксимация этих функций [5, 6].
Алгоритм нахождения точек пересечения позволяет вычислять координаты точек пересечения двух произвольных функций на плоскости, заданных таблично, при этом используется их линейная аппроксимация.
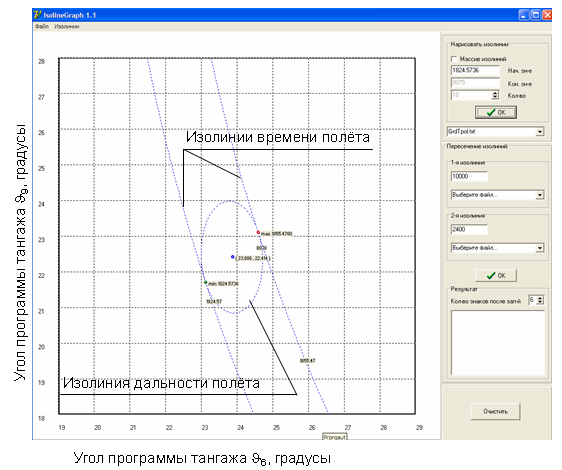
При решении задач выбора программ управления для совокупности из n ЛА с целью обеспечения синхронизации их подлёта к целям разработан оригинальный алгоритм поиска экстремумов табличной функции двух переменных при ограничениях в виде кривых линий, заданных также таблично. Этими линиями являются изолинии другой функции. Решение этой задачи производится полуаналитически, с использованием визуализации характера изменения функций, задающих краевые условия, при этом задача двухмерной оптимизации сводится к одномерному случаю (см. рис. 2).
|
Рис. 2. Результат поиска максимального и минимального времени полёта для заданной дальности |
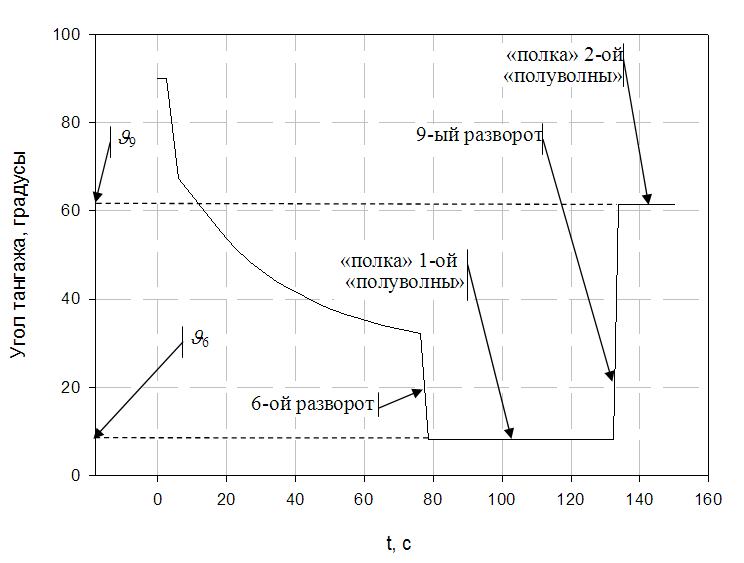
Проведён тестовый расчёт значений управляющих параметров программы тангажа для комплекса из пяти ЛА и двух точек прицеливания, которые располагаются на значительных удалениях друг от друга. ЛА были распределены между точками прицеливания случайным образом. В результате исследований получены конкретные виды программ тангажа каждого ЛА (см. рис. 3), которые обеспечивают одинаковое время подлёта всех ЛА к целям. При проведении прямых расчётов были вычислены значения отклонений точек падения ЛА и времён полёта. Отклонения по времени ΔТп составили не более 0,18 сек, отклонения по дальности ΔSсф не превысили 0,51 км.
|
Рис. 3. Выбранные параметры программы тангажа для гипотетического ЛА |
ПК используется для проведения учебных занятий по баллистике ЛА, а также в научных исследованиях характеристик полёта ЛА, особенностей функционирования их структурных элементов и систем.
Литература
Математические модели движения для синтеза методов наведения перспективных баллистических ракет // Оборонная техника.‑ 2007.‑ № 3-4. С. 12-16. , , и др. Баллистика: Учебник / – Пенза, ПАИИ, 2005, 510. , Решение краевых и оптимизационных задач баллистического проектирования на основе визуализации сеточных функций // Вестник МАИ, №3. 2009. Построение изолиний с автоматическим масштабированием // Вычислительные методы и программирование, 2001, т. 2. , , Сплайны в инженерной геометрии, М. Машиностроение, 1985, 221 с. , Методы оптимизации в примерах и задачах. – 2-е изд., исправл. – М.: Высш. шк., 2005, 544 с.* Работа выполнена при финансовой поддержке РФФИ, проект № 09-08-00750-а.
